 IMU在精准农业中的重要性和作用
IMU在精准农业中的重要性和作用
现代农业越来越多地采用传感和定位技术,通过跟踪局部生长状况并按需施用适当的水、农药和肥料等资源,来提高田间作业的效率并最大限度地提高作物产量。这种应用的系统设计人员明白,卫星定位在精度方面有其局限性。但是,采用惯性测量装置 (IMU) 可以弥补差距。
IMU 将三轴加速计与三轴陀螺仪集成在一起,测量系统运动并通过航位推算确定系统定位。通过将这些数据与全球定位系统 (GPS) 信息相结合,设计人员可以开发出农机控制系统,能够精确、持续了解设备相对于农田和作物的位置,同时针对地形倾斜、设备臂移动及其他因素进行修正。
本文探讨了 IMU 在精准农业中的重要性和作用,并讨论了使用 IMU 执行航位推算时的潜在误差源、如何减少这些误差,以及开发人员应考虑的环境和安全因素。最后,本文将介绍来自 Honeywell Sensing and Productivity Solutions 和 Analog Devices 的精密 IMU,说明如何利用这些 IMU 来帮助将精度提高至卫星导航系统单独无法达到的水平。
为什么位置跟踪对农业至关重要
传统农业走的是粗线条。尽管农田内的土壤成分、蒸发量等不可避免地存在着差异,但耕地、播种、灌溉、施肥、收割都是在整块农田里(面积通常是几英亩)或多或少地统一进行。在这些活动中,人工操纵机械可能会导致遗漏或重叠的区域,从而降低农田利用率,或因多余的作业而浪费资源。虽然两次农机经过之间一两英尺的操纵误差看起来并不多,但在大面积农田上纵横交错作业时,损失会大量累积,增加了所需的时间和燃料(图 1)。
准确了解位置有很多好处。不仅可以收集大面积农田中特定地点的土壤状况信息,还可以针对特定地点相应地施用水、肥料、农药,以最大限度地提高产量。定位精度越高——最好精确到单棵植物——收益越大。
精准农业改变了农民耕作土地的方式。卫星导航技术的出现,让农民能够准确地绘制出田间生长条件的变化图,并可为农业机械提供该空间内相关位置的实时信息。这种详细测图与精确的位置信息相结合,让农民能够因地制宜地灌溉、施肥和喷洒农药,以提高产量、尽量减少浪费,并降低环境影响。
实时位置信息还可以让农民避免播种和收割作业遗漏或重叠,从而最大程度地利用田地,同时通过优化农机行进路线将时间和燃料消耗降至最低。此外,这种系统还可以支持农业机械半自动驾驶,以减少驾驶员的疲劳,即使在灰尘、大雾、雨天和光线暗等低能见度条件下,也能实现高效操作。目前,50% 以上大大小小的农田都采用了精准农业方法,并且采用率正在不断提高。
超越 GPS
理想的农业定位系统应该足够精确,能够在可能延伸数百英亩的田地中可靠地定位一株植物或一排作物——也就是说,提供几英寸的精度。但仅靠卫星导航系统提供的定位精度有限。美国 GPS 的基础接收器只能提供几米的精度。从固定站转播 GPS 信号的双通道 GPS 接收器或实时动态定位 (RTK) 系统,可以达到远低于 1 m 的精度。然而,即便如此,它们也依赖于卫星广播信息的精度,通常情况下,产生的平均精度在 0.7 m 左右。GPS 定位的其他复杂因素包括附近物体和地形反射或阻挡信号造成的影响、卫星星座几何形状,以及一天中的时间。
此外,卫星导航还存在其他局限性。该系统提供的位置只是一个点——接收器天线的相位中心。GPS 不提供方向信息;例如,只能通过确定连续点位之间的方向矢量来推断面对的方向。类似地,GPS 对纯旋转不敏感,因此不能确定相对垂直 GPS 的任何倾斜。
这种以天线为中心的定位和对旋转的不敏感会在农业应用中产生位置误差。例如,一辆配备 GPS 功能的拖拉机,天线可能会安装在驾驶室的顶部,可能离地面有 10 英尺,而这是 GPS 定位的中心位置。我们可以合理地认为,通过简单的几何运算能够从天线位置可靠地确定拖拉机或任何附属设备在地面上的位置。问题是,由于 GPS 系统无法确定方向,如拖拉机在斜坡上行驶时(图 2),刚性几何学预测的位置将偏离实际的地面位置。即使是小至 5 度 (°) 的倾斜,在这种情况下也会产生超过 10 英寸(25.4 厘米)的地面位置误差。

GPS 无法确定方向,因此在确定设备的实际地面位置时,斜坡可能会造成误差。(图片来源:Richard A Quinnell)
这些问题的一种解决办法是利用测量系统运动的传感器进行航位推算,用惯性导航补充 GPS 导航。惯性航位推算可以在 GPS 信号弱或不存在时继续提供准确的位置信息,同时还可以对多路径或其他信号失真可能产生的虚假结果进行“真实性检查”。此外,惯性导航传感器可以填补卫星导航无法提供的方向信息。例如,通过简单地测量地心引力的方向,惯性传感器让系统可以修正 GPS 地面定位中的倾斜误差,并可通过支持翻车警告来提高操作人员的安全性。
实际上,这种惯性测量装置依赖于两类微机电系统 (MEMS) 传感器:加速计和陀螺仪。加速计可以测量沿三个正交轴的线性运动变化,由于地心引力是一种加速度,因此还可以表明其方向。陀螺仪测量围绕三个相同线性轴中每个轴的角运动(即旋转)。两者相结合,可以测量系统沿六个自由度的运动变化(图 3)。
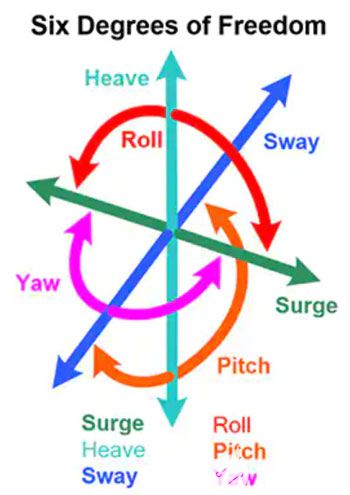
惯性导航使用传感器测量沿六个自由度(三个线性和三个角度)的运动变化,以支持位置的航位推算。(图片来源:Honeywell Sensing and Productivity Solutions)
不过,这些惯性传感器并不能直接显示位置。加速计只测量系统的前后摇摆、上下起伏和左右摇摆。这些值必须对时间进行积分,才能获得系统速度,然后再次积分才能获得位置。类似地,陀螺仪测量滚转、俯仰和偏航,它们必须对时间进行积分,才能获得角方向。
这些积分可能有助于减少传感器测量中随机运动噪声的影响,因为这类信号往往倾向于平均化。但积分会加重惯性传感器固有的一些主要系统误差源的影响。如果不加以修正,这些误差会累加起来,破坏航位推算位置的精度,从而限制该方法对丢失的 GPS 信息进行补偿的效果。通常,传感器测量误差越小,航位推算越长,就越可能提供所需精度的位置。
IMU 中的误差源
零偏误差:在 MEMS 惯性传感器中,无论是加速计还是陀螺仪,主要误差源之一是零偏误差。零偏误差是指传感器在没有旋转或线性加速度的情况下产生的残余信号。这种误差往往是确定性的,对于每个设备都是独一无二的,而且通常还是温度的函数。在一段时间内对该信号进行积分,则会迅速达到不可接受的水平,但通过适当的校准测试,可以确定传感器的零偏误差,并将其排除在计算之外。
零偏不稳定性:零偏不稳定性与零偏误差有关,这是指设备的零偏误差随时间而发生随机变化。该误差源无法通过校准来消除,因此开发人员必须评估他们的设计能够承受多大的变化,并寻找一款零偏稳定性规格足够低的传感器来满足他们的需求。
比例系数误差:这是惯性传感器中的另一个确定性误差。比例系数又称灵敏度,是将传感器输入映射至输出的最佳拟合线性关系。传感器的比例系数误差是其输出与该直线关系的偏差,通常以百分比或百万分率表示。这也可能与温度有关,并可通过适当的校准进行补偿。
g 灵敏度:陀螺仪特有的一个误差源是其对线性加速度的灵敏度,又称为 g 灵敏度(g 是来自重力加速度的缩写,通常为 9.8 m/sec2)。在 MEMS 陀螺仪中,由于其试验质量的不对称性,因此会产生这种线性加速度误差。
MEMS 陀螺仪的工作原理是,以一个方向对试验质量进行振动,同时感测正交方向上的任何运动。当传感器围绕与其他两个方向正交的轴旋转时,科里奥利效应会导致试验质量产生可检测的侧向移动。
传感器在与试验质量振动正交方向上产生线性加速度,也会因试验质量的惯性而产生这种侧向移动。陀螺仪对这种加速度的灵敏度取决于设计和制造精度。但是,使用来自独立加速计的数据,系统就可以补偿该误差。
振动整流误差 (VRE):这是陀螺仪特有的另一个误差源,又叫 g 平方误差。它是加速计对交流振动(被整流为直流)的响应,表现为加速计失调的异常偏移。VRE 有多种发生机制,并且无法实时补偿,因为它高度依赖于应用的具体情况。开发人员应确定传感器的 VRE 是否在可接受限制内。通过使用减振传感器安装技术,可以帮助减轻一些振动问题。
交叉轴灵敏度:在系统层面,传感器的机械错位也会带来误差。其中一个误差是交叉轴灵敏度。当实际感应轴偏离预定方向时,就会出现这种情况,从而导致传感器本不该检测到的来自正交运动的信号。例如,预期保持水平的传感器若没有对准,则可能仍会检测到地心引力。加速计与陀螺仪轴之间的错位会影响系统补偿陀螺仪 g 灵敏度误差。
离轴误差:力学也是产生加速计离轴误差的原因之一。如果对传感器的冲击点不在加速计的试验质量中心,则由于试验质量围绕冲击线轻微旋转,因此传感器会检测到额外的加速度。
集成式 IMU 可缓解传感器误差问题
对于试图用分立传感器构建 IMU 的开发人员来说,如此多的误差源带来了巨大挑战。幸运的是,具有六个自由度的预集成 IMU 已广泛普及,这大大简化了相关工作。其中一些以模块形式提供,如 Analog Devices 的 ADIS16465-3BMLZ 精密 IMU 模块和 Honeywell 的 6DF-1N6-C2-HWL。开发人员只需用螺栓将这些器件固定在底盘上,即可将它们纳入系统设计中。
市面上也有片式、板安装式精密 IMU 提供,如来自 Analog Devices 的 ADIS16500/05/07 系列。这些器件适合与其他传感器和 GPS 接收器整合为一体化组件。
这两种类型的 IMU 可消除或缓解 IMU 开发中的许多潜在误差,因此有助于减轻开发工作量。例如,Analog Devices 的 ADIS16500/05/07 系列在单个 BGA 封装中集成了一个三轴加速计、一个三轴陀螺仪和一个温度传感器。这些器件内置校准和滤波功能,与其他功能相结合,有助于减少许多 IMU 误差源(图 5)。
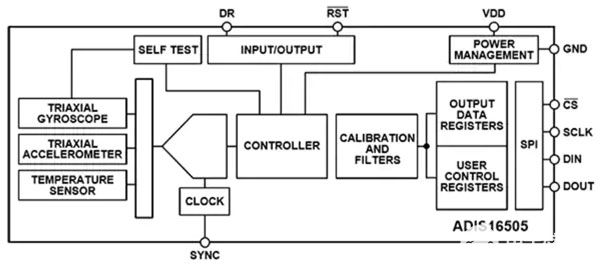
集成式 IMU 如此处所示的 Analog Devices 的 ADIS16505,可通过板载校准、滤波和校准功能来减少许多潜在的误差源,从而帮助简化系统设计。(图片来源:Analog Devices)
交叉轴灵敏度等误差可在器件制造中加以解决。例如,ADIS16505 将轴与轴之间的对准误差限制在 0.25° 以内。这种仔细的对准以及采用共同传感器读数时钟,简化了设计人员使用加速计读数来校正陀螺仪中的线性加速度误差的过程。内置的温度传感器为减轻许多误差源的温度依赖性提供了支持。
这些集成式 IMU 的内部信号链提供了额外的误差抑制(图 6)。原始传感器信息首先通过一个数字滤波器去除噪声,然后通过一个用户可配置的 Bartlett 窗滤波器。Bartlett 窗是一种使用两个级联级的有限脉冲响应 (FIR) 平均滤波器。
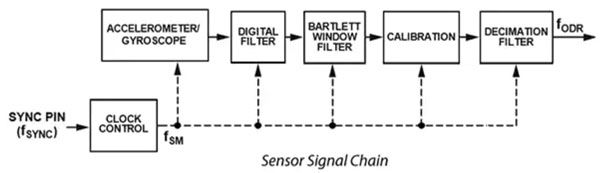
集成式 IMU 器件可提供内置滤波功能,并可通过应用出厂设定校准参数来补偿许多系统传感器误差。(图片来源:Analog Devices)
信号接下来将经过一个校准阶段,在这个阶段将根据跨越设备整个工作温度范围的多个温度下运行的工厂校准测试,来应用设备特定校正。这个阶段对所有六个传感器样本同时使用矩阵乘法,能够补偿加速计和陀螺仪的零偏、比例系数和对准误差。它还可以修正陀螺仪中的线性加速度误差和加速计中的轴失调误差。
此外,还提供了一个用户可选择的敲击对准校正点,以调整加速计输出,使其表现得在封装中好像都位于相同的基准点。所有其他工厂校准功能一般都无法使用,但这些器件确实能够让用户使用自己选择的附加值,来调整工厂的传感器零偏补偿。
在经过校准修正后,信号通过第二个数字滤波器。抽取滤波器会取多个样本的平均值,以产生最终输出,从而实现额外的降噪效果。一起平均的样本数取决于用户的采样和寄存器更新频率选择。
系统注意事项
集成式 IMU 无法修正的少数误差源之一就是 VRE。对于农业机械来说,强烈的振动不可避免,因此设计人员必须在此问题上仔细评估系统的要求。许多低成本 IMU 的 VRE 非常差;有些数值差到连厂商都不愿意说明。公平地说,在这些低成本 IMU 的预期应用中,VRE 并不是一个重要问题。但是,用于精准农业等高振动环境的器件,需要尽可能低的 VRE。例如,ADIS16500 系列的 VRE 大概为 4 x 10-6 (°/sec)/(m/sec2)2。因此,持续的 1 g 振动(强度足以使驾驶员从座位上弹开)只会导致每小时 1 度左右的旋转误差。
要实现一个有效的系统,重要一步是没有安装、对准和校准问题,但这只是一个开始。开发人员仍然必须将惯性测量转化为位置跟踪、解决航位推算与 GPS 定位之间的差异,并了解和缓解应用特定的因素,如日常使用过程中系统冲击和振动的量及频率。
如果使用定位系统对移动机械进行自动甚至半自动控制,还要考虑安全因素。MEMS 传感器可能会因过大的冲击而不堪重负。虽然这些器件通常能够经受住大的冲击而不损坏,但如果冲击使传感器超过极限,可能会导致传感器暂时关闭,或在恢复时使输出固定于最大值。在设计系统时,需要使这种瞬间冲击不会无意中导致危险或烦人的系统行为,如突然改变方向或错误地触发系统安全关机。
因此最好先使用像 Analog Devices EVAL-ADIS2Z(图 7)这样的评估板先进行评估然后再开始。该评估板能够让开发人员使用 PC 访问器件寄存器和数据,并且尺寸足够小,可以方便地安装在具有代表性的目标机械上,可收集振动和运动统计数据。
该评估板支持应用软件,可实现基本演示、单个寄存器访问和高速数据采集。
结语
基于卫星导航的精准农业为农民提供了更高的生产率,同时降低了资源的使用量。通过加入惯性定位功能,设计人员可以大幅提高定位的精度,帮助农民在农田管理方面实现植物级的精度。但是,要做到这一点,开发人员需要在设计中解决传感器和系统误差源。集成式六自由度精密惯性测量装置通过提供仔细的对准、滤波和内置的校准误差修正,大幅减轻了开发负担。
-
滤波器
+关注
关注
161文章
7801浏览量
178047 -
测量装置
+关注
关注
0文章
30浏览量
13075 -
IMU
+关注
关注
6文章
311浏览量
45736
发布评论请先 登录
相关推荐
PROM器件在物联网设备中的重要性
元器件在电路设计中的重要性
变电所继电保护的作用与重要性
EMI滤波器的作用和重要性
NLP技术在人工智能领域的重要性
PLC的I/O模块的作用及其重要性
论RISC-V的MCU中UART接口的重要性
AC/DC电源模块在电力系统中的作用与重要性
气象监测站的作用及重要性






 工商网监
工商网监
评论