 如何利用Arduino创建一个电机滑动门
如何利用Arduino创建一个电机滑动门
项目概况
在这个项目中,我利用Arduino的强大功能创建了一个为滑动门供电的电路。这个项目的主要目的是利用一个带有功能交流电机的滑动门,并使用一个Arduino、几个继电器、一个433MHz接收器、一个433MHz发射器和一些电气技能来完善自动化系统。
该系统创建了一种在需要时为门的电机供电并决定是是否开闭门的方法。
Arduino不断收到来自发射器的设定响应,在这种情况下,它是用于打开或关闭门的遥控器。发射器在两个通道上运行,每个通道都有其唯一的ID。一旦433MHz接收器接收到此ID,它就会向Arduino发送一个信号,Arduino控制继电器为电机供电。
方法
第1步:为电机供电
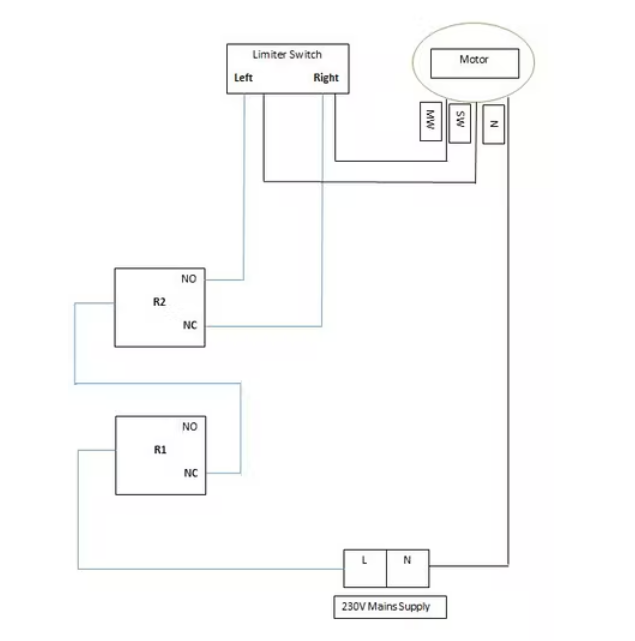
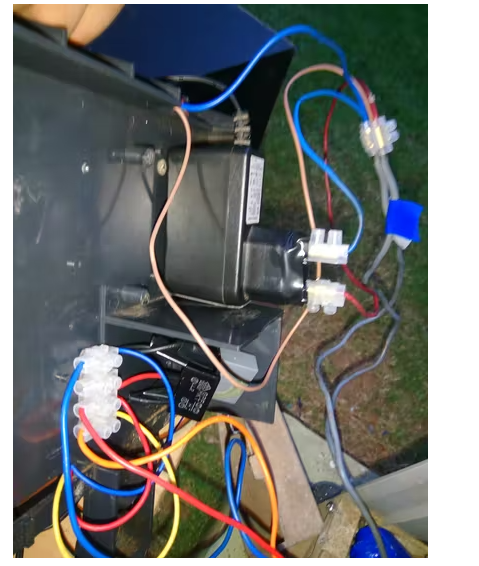
为电机供电的配置如下所示。为了使电机正向(关闭)方向移动门,主绕组应连接到主电源。为了使电机反向(开路)方向运动,次级绕组应连接到主电源,有必要确定哪根导线对应于哪个绕组。通常电线没有标签,这可以通过向电线提供交流电源来反复试验来识别。
就我而言,我使用的是220~240VAC电机。我能够轻松识别中性线,因为它是蓝色的,这是用于指示中性端子的标准颜色。接下来,我将带电端子连接到红线,使电机正向转动。这表明我为电机的主绕组供电。
注意:确保启动电容器连接正确且正常工作。这确保了电机具有足够的启动扭矩。

第2步:停止电机
主电源通过限幅开关提供给电机。一旦门到达一端,限制器开关就会被触发,从而打开电路并停止主电源向电机供电。
第3步:使用继电器控制电机
继电器有两个触点;常开和常闭。
常闭路径用于为电机的主绕组供电。选择此选项是为了确保当系统重置或系统出现问题时,电机将确保门始终保持关闭。
常开路径用于为电机的次级绕组供电。当继电器内部的线圈通电时,常开路径关闭。这可以通过从Arduino发送5V信号来完成,因为使用的继电器在5V下运行。
通过使用两条路径为电机供电,确保不会同时向电机的主绕组和次级绕组提供电力。
该继电器(R2)通过Arduino的引脚8进行操作。如果Arduino在门移动时接收到来自接收器的命令,则使用第二个继电器(R1)断开电路以使电机停止。Arduino会不断检查接收器是否收到任何命令。一旦发出命令,Arduino就会重新为电机供电,以使其关闭或打开门。
第二个继电器的主要目的是给系统足够的时间来重新路由系统来为电机供电,而不会立即改变电机的转动方向。一旦重新路由完成,继电器就会关闭,并且向电机供电以向相反方向转动。
该继电器通过Arduino的引脚9进行操作。
用途
如果系统中途关闭门并从接收器接收到打开门的命令,则激活继电器以将电源重新路由到次级绕组。由于这种情况几乎是瞬间发生的,因此继电器处于恒定的压力下,来自电机产生的反向电压,原因是主绕组突然断电。此外,如果持续受到压力,会永久损坏继电器的触点。
在附加继电器的帮助下,电源与电机断开,系统有10秒的时间将电源重新路由到必要的绕组。这减少了继电器触点上的应力并延长了它们的使用寿命。
使用的继电保护方式:
抑制电容器
当直流电机突然停止时,电机线圈会产生负电流回路,这是由于线圈的电感特性。然而,这可以通过安装反馈二极管来消除,以提供负电流流动的路径。
当交流电机通过开关突然停止时,会在开关触点上产生高电压。
当电机被告知以相反方向运行时,抑制电容器用于防止继电器触点上的高压积聚。这可以保护继电器触点。
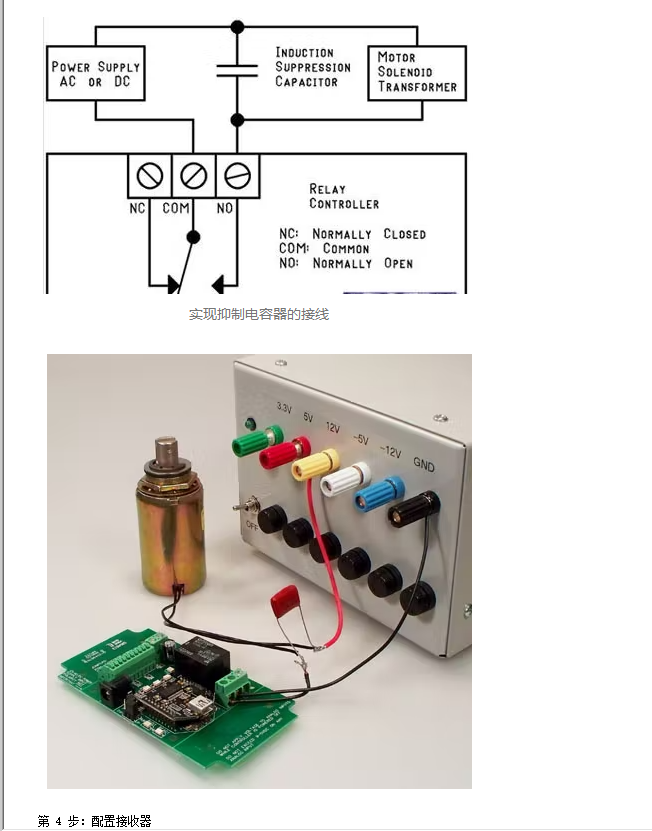
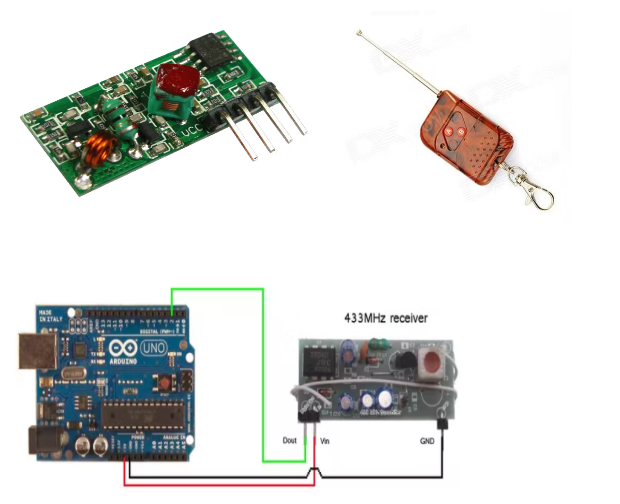
第4步:配置接收器
接收器工作在433MHz频段,Arduino的程序会不断循环检查接收器的信号端口,直到接收到正确的信号。之后Arduino就会激活继电器1(R1),以便继电器2(R2)将电源路由到电机。
当从发送器发送数据时,接收器以整数形式接收数据。就我而言,使用Arduino的串行监视器,我能够看到接收器能够接收到的值。使用较高射频进行通信的主要原因是工作范围大,即使有一些障碍物阻挡信号,接收器也能接收到信号。这只能通过高频无线电波来实现。
在我的项目中,我能够获得大约30英尺的工作半径来激活系统。
注意:系统的工作半径可以通过将一根长导线焊接到接收器模块中的天线端口来扩大几英尺。
最终项目照片
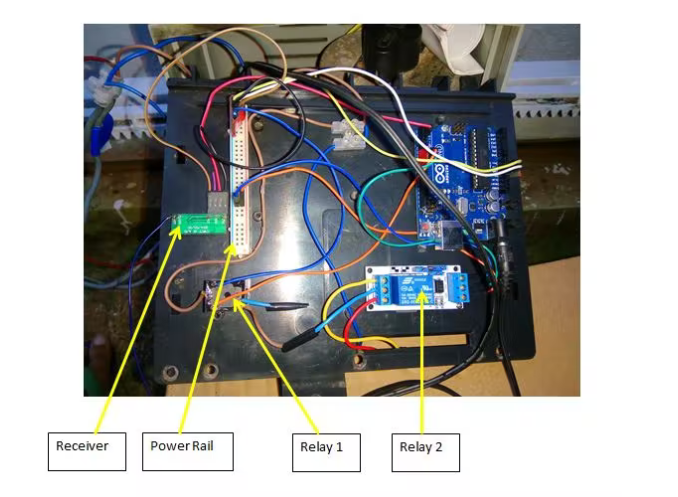
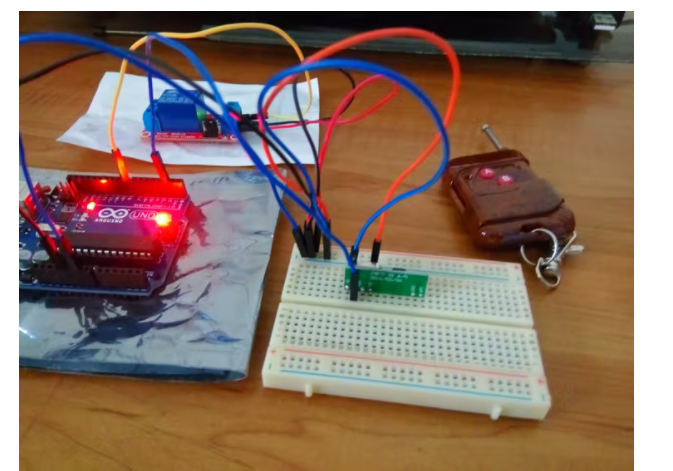
-
继电器
+关注
关注
132文章
5381浏览量
150244 -
电机
+关注
关注
143文章
9164浏览量
147240 -
Arduino
+关注
关注
188文章
6481浏览量
189068
发布评论请先 登录
相关推荐
基于FPGA创建一个简单的电机控制程序
地铁屏蔽门解析(控制系统、功能)
【项目分享】教你如何运用Arduino通过网页实时控制伺服电机
基于Arduino创建一个手势控制车
在Arduino上创建一个Hello World程序
毫米波传感器解决了入口系统设计人员面临的哪些挑战
自动拉门用直线电机的有限元建模资料免费下载
Arduino板是什么如何使用IDE软件创建和上传Arduino程序到Arduino板

Arduino驱动四个电机

TI毫米波传感器为自动入口系统带来智能性、高效性和便捷性






 工商网监
工商网监
评论