 基于PDMS-CNTs复合材料的柔性压力传感器
基于PDMS-CNTs复合材料的柔性压力传感器

电子皮肤(e-skins)作为一种新型电子器件,在人机交互、医疗健康、机器人触觉等领域广泛应用。长期以来,电子皮肤的发展始终面临一个挑战,其多层异质结构产生的应力失配以及层间的弱粘附性问题,使其在极端的机械条件下极易出现信号失真或失效。此外,将电子皮肤集成在软体机器人或其它机器时同样存在该问题。因此,解决电子皮肤界面稳定性并提高其传感性能,对于其应用拓展意义重大。
据麦姆斯咨询报道,近期,南方科技大学郭传飞教授团队开发出一款基于聚二甲基硅氧烷-碳纳米管(PDMS-CNTs)复合材料的柔性压力传感器,其微结构界面引入了拓扑交联设计策略,可实现传感器与软体机器人的无缝集成,在极端的机械条件下能表现出超稳定的传感性能。该项目联合单位包括四川大学、沈阳科技大学和腾讯Robotics X实验室,研究成果已发表于Nature Communications期刊。
该项研究中,研究人员创新性地提出了同质器件结构的设计策略,所有器件均采用PDMS-CNTs材料制成,有效避免了异质结构所产生的应力失配。同时,器件各功能层通过拓扑交联相互连接,获得了高达~390J·m⁻²的界面韧性和90kPa的高剪切强度。
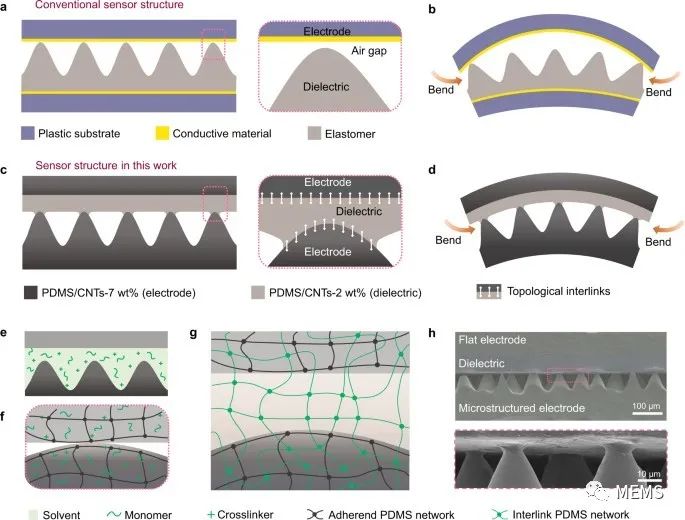
集成式PDMS-CNTs柔性压力传感器的设计机制
该PDMS-CNTs柔性压力传感器微结构界面的高韧性和强度得益于拓扑交联、微结构引起的弹性耗散以及微锥体的离散破裂模式。虽然掺杂了少量的碳纳米管会导致复合材料的杨氏模量增加,但微小的差异几乎不会导致应力失配,所有功能层都表现出相似的应力特性。
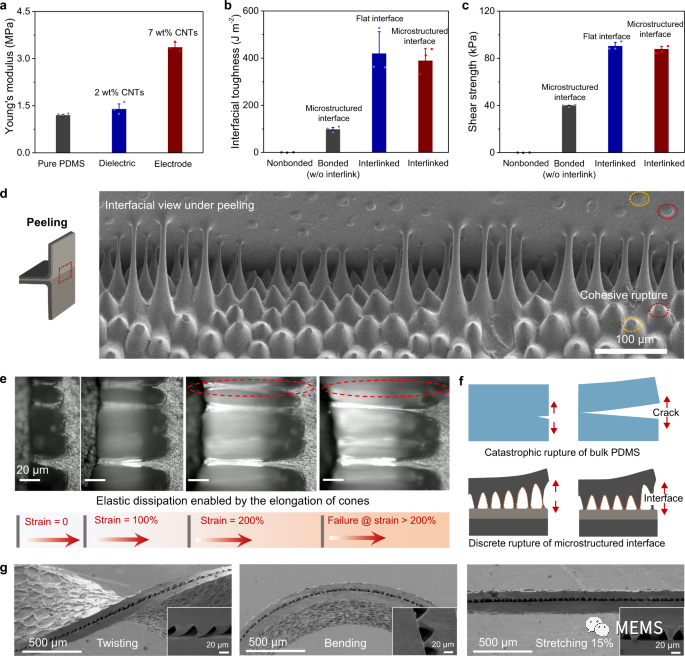
PDMS-CNTs柔性压力传感器微结构界面的设计机制
在高压、高剪切力模式下,PDMS-CNTs柔性压力传感器均表现出优异的传感性能。研究人员将其在10kPa的常压和2mm的往复位移下循环摩擦10万次,或在5kPa的剪切力下循环作用1万次后,该传感器均未出现信号幅度或机械故障的明显变化。
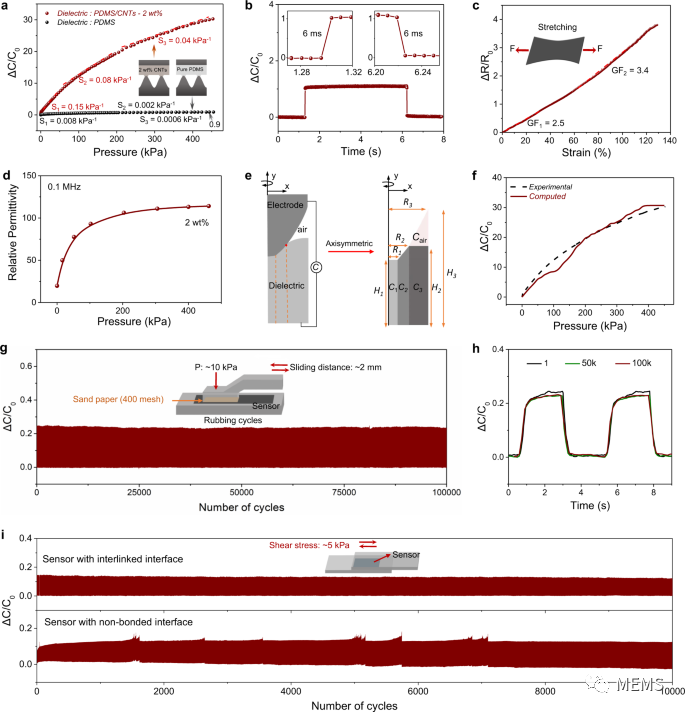
PDMS-CNTs柔性压力传感器的传感特性、传感机制和信号稳定性测试
为了进一步测试该传感器在极端条件下的稳定性,研究人员将其贴附在汽车轮胎上,汽车行驶时轮胎胎压约为300kPa,剪切应力约为6kPa,当行驶2.6km后该传感器仍可以正常工作,作为对照的商用压力传感器在汽车行驶0.5km时则出现故障了。
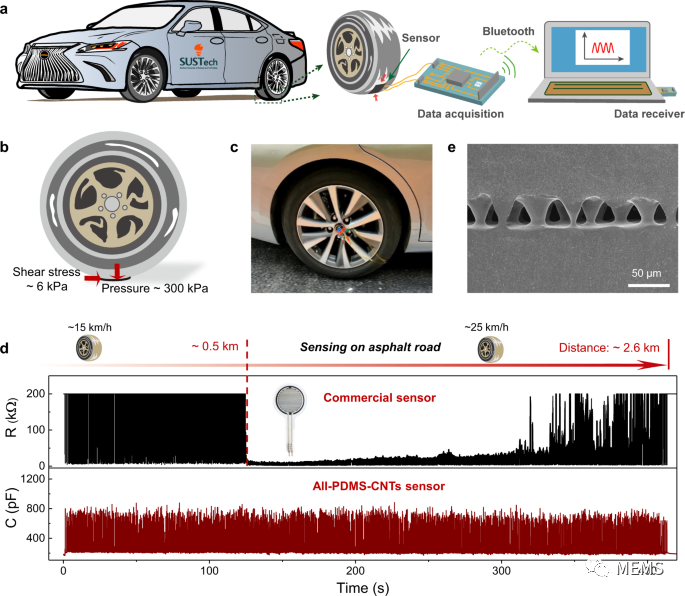
PDMS-CNTs柔性压力传感器和轮胎胎面商用压力传感器的对比测试
该同质结构和界面拓扑交联的器件设计策略还可以应用于传感器与机器人的集成上。研究人员展示了软体机器人与传感器的无缝集成,二者都由PDMS-CNTs复合材料制成,在不同的抓取场景下,器件均表现出极稳定的传感性能,且微结构界面未出现任何故障或疲劳。
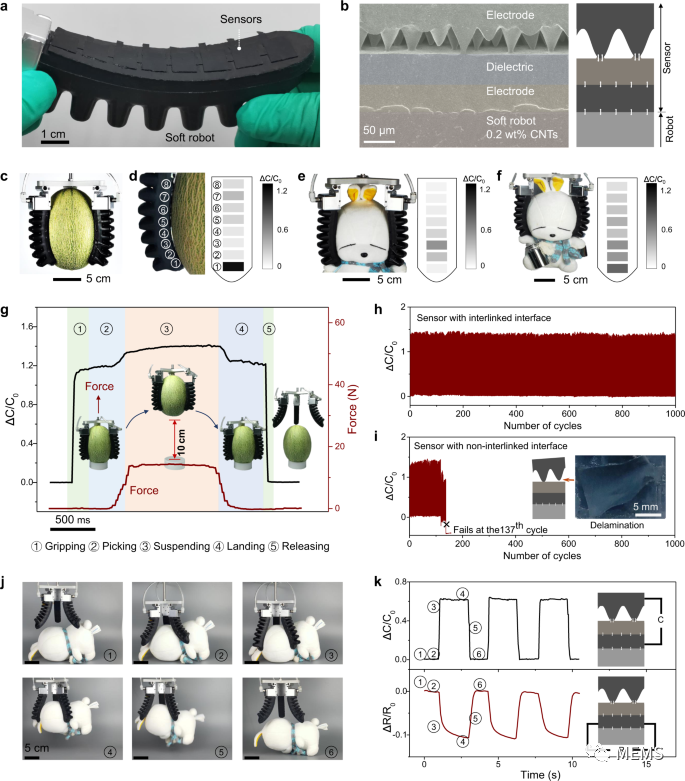
软体机器人与PDMS-CNTs柔性压力传感器集成的抓取测试
该研究成果为开发具有更高灵敏度、响应率和韧性的电子皮肤,以及进一步提升传感器与软体机器人的集成度开辟了一条新的道路。
原文标题:创新的PDMS-CNTs柔性压力传感器,可实现传感器与软体机器人无缝集成
文章出处:【微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
传感器
+关注
关注
2578文章
55756浏览量
795039 -
测试
+关注
关注
9文章
6491浏览量
131765 -
复合材料
+关注
关注
2文章
275浏览量
13872
原文标题:创新的PDMS-CNTs柔性压力传感器,可实现传感器与软体机器人无缝集成
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
高温环境下的材料竞争:聚酰亚胺复合材料与金属、陶瓷及传统树脂基复合材料的对比研究

福禄克柔性化压力传感器生产标定系统产品简介

ABP2系列压力传感器的气动连接方式

探秘XKP压力传感器:汽车与赛车运动的理想之选
安徽农业大学: 开发石墨烯/聚氨酯海绵复合材料,用于柔性压力传感器和智能缓冲材料

压力传感器、压力换能器还是压力变送器?
如何优化气体压力传感器性能,提高传感器测量精度?
如何判断压力传感器的线性度?
【经验】SRT3000压力传感器技术详解之参数如何匹配设计需求
瑞之辰压力传感器,小尺寸的国产替代新风潮

复合材料扭力测试力学性能研究
【选型】如何正确区分压力传感器和压力变送器
Melexis压力传感器技术的应用领域
瑞之辰压力传感器在水泵、动力电池领域的创新应用



评论