 可以到处钻的蛇形机器人在海底执行各种工作任务
可以到处钻的蛇形机器人在海底执行各种工作任务
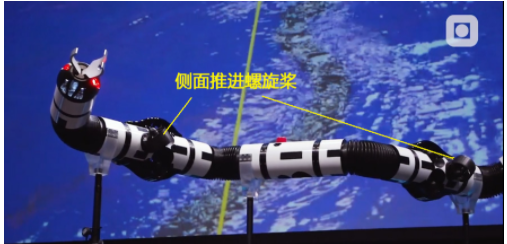
蛇形机器人可以在海底执行各种工作任务,像蛇一样的灵活摆动,头部还具备可替换适应各种工作用途的蛇头,比如钳子和毛刷等。同时还具有视觉识别感知等功能,可勘探海底管道或各种海底设备中的可能会出现的隐患。

可替换不同功能的蛇头
那么在蛇形机器人的两侧,装有4套螺旋桨推进系统,蛇身在摆动转方向的同时,给予蛇形机器人更加快速的推进力和更灵活的游动。
既然用到螺旋桨推进器,必然会用到电机动力桨,在这种应用场合的前提下,轴向磁场电机应该是个不错的动力选择方案,轴向磁场电机具有轴向尺寸小,扭矩大的特点,在螺旋桨和机器人等动力应用具有很好的优势特性。
就比如目前我们开发的轴向磁场螺旋桨电机,就适合有螺旋桨场合的多种应用。
那么这种蛇形机器人类型只是在海底设备检测上应用吗?相信在原理样机完成并可以满足探测、监控、维修和清洁等实际功能后会开发并能适应更多的行业应用。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28372浏览量
206890 -
视觉识别
+关注
关注
3文章
89浏览量
16721 -
蛇形机器人
+关注
关注
0文章
7浏览量
6166
发布评论请先 登录
相关推荐
复合机器人在3c电子行业的应用
时代在发展科技在进步,复合机器人在3C电子行业中的应用已经变得越来越广泛,它们以高效、精确和灵活的特点,为3C电子产品的生产带来了显著的变革。以下是对复合机器人在3C电子行业应用的详细分析:
直角坐标机器人在精密制造中可以执行哪些任务?
直角坐标机器人基于X、Y、Z轴精确控制,用于物料搬运、装配、焊接、喷漆、检测、包装等制造业任务,以其结构简单、高承载和精确控制成为自动化工具,飞创提供高速高精度直线电机模组解决方案。

【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
的自适应性和自主性,赋能机器人在多种场景中的应用。
例如,在家庭自动化领域,具身智能机器人能够感知家庭成员的日常习惯和需求,自动执行清洁、整理或其他家务任务。它们通过观察家庭成员的活动
发表于 11-11 10:20
利用NVIDIA Isaac平台构建、设计并部署机器人应用
任务等功能。
AI 在这一变革中发挥着关键作用,提高了机器人的性能。通过集成 NVIDIA AI 加速,机器人可以更高的精度和效率处理复杂的任

富唯智能协作机器人在食品饮料行业的柔性应用
富唯智能协作机器人在食品和饮料供应链中广泛应用于包装和机床管理等次级流程。协作机器人可以在潮湿的温室、冷藏室、加热炉等环境中工作,将员工从重复性工作

工业机器人任务编程基本流程
随着科技的迅猛发展,工业机器人在制造业中的应用越来越广泛。它们不仅能够执行重复性、高精度的任务,还能在恶劣环境中代替人工进行作业,极大地提高了生产效率和安全性。要实现工业机器人的高效运
abb机器人home点设置方法
,我们需要了解什么是home点。在ABB机器人中,home点是一个特定的位置,机器人在执行任务之前会先回到这个位置。这个位置可以是机器人的初
机器人在空间中运动指令主要有哪些
在这篇文章中,我们将详细探讨机器人在空间中运动指令的各个方面。我们将从机器人运动的基本概念开始, 一、机器人运动的基本概念 机器人的定义 机器人
协作机器人在食品和饮料中的的应用
富唯智能协作机器人在食品和饮料供应链中广泛应用于包装和机床管理等次级流程。协作机器人可以在潮湿的温室、冷藏室、加热炉等环境中工作,将员工从重复性工作
探索未来:智能巡检机器人在工业领域的应用
,顾名思义,是一种具备智能化功能的机器人设备,主要用于工业环境中的巡检任务。它结合了先进的导航技术、高精度的定位系统以及各种传感器和摄像头,能够在复杂的工作场景中自主导航、准确定位,并

【TE Perspective】协作机器人在工厂自动化中日益增长的作用
将有机会帮助他们把效率和生产力提高到一个新水平。 与传统工业机器人相比,协作机器人更小、更经济、更易编程,而且它们的灵活度也大幅提升 。现代化的机器人可以满足快速重新分配
发表于 01-24 17:08
•258次阅读

上下料机器人,他可以替代人工执行自动化的物料搬运任务
“上下料机器人” 可能指的是自动上料和下料的机器人系统,通常用于工业生产线。这些机器人系统可以执行自动化的物料搬运






 工商网监
工商网监
评论