 RTOS开发中的Mutex互斥锁
RTOS开发中的Mutex互斥锁
在基于RTOS开发项目时,通常都会遇到互斥的情况,比如:几个任务都要使用一个UART串口进行发送数据。
如果不加互斥锁,优先级高的任务,会抢占串口并发送数据,则有可能会出现发送数据“乱码”的情况。
今天就说说在RTOS开发中,互斥锁一个常见的问题。
什么是Mutex互斥锁?
学习过RTOS的读者应该对互斥不陌生,互斥锁就是为了避免任务之间互相抢占某种资源而设计的一种“锁”。
就如上面说的,一个串口,被两个任务抢占,如果不加锁,则会出现两个任务交叉发送数据,即“乱码”;
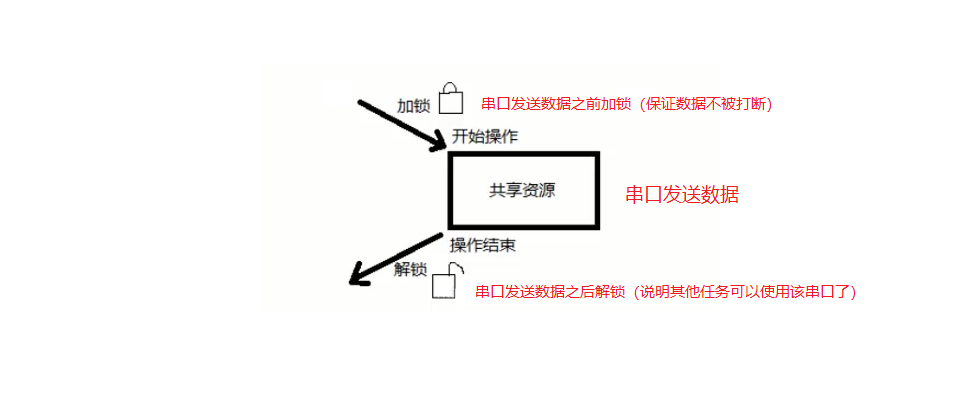
但是,如果加了互斥锁,则会等待其他任务发送完成之后才继续发送,保证了数据的完整(而不是乱码);
Mutex互斥锁例子
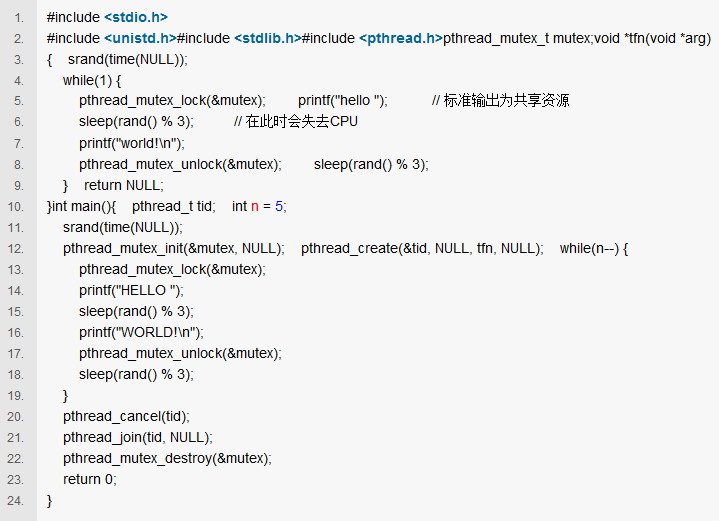
这里以三个任务、两个互斥锁为例,代码如下:
void task1(){/*do something*/OSMutex1_Pend(); //互斥锁1加锁/*加锁处理事情*/OSMutex1_Post(); //互斥锁1解锁}void task2(){/*do something*/OSMutex1_Pend(); //互斥锁1加锁OSMutex2_Pend(); //互斥锁2加锁/*加锁处理事情*/OSMutex2_Post(); //互斥锁2解锁OSMutex1_Post(); //互斥锁1解锁}void task3(){/*do something*/OSMutex2_Pend(); //互斥锁2加锁/*加锁处理事情*/OSMutex2_Post(); //互斥锁1解锁}
这样设计,大家看出问题了吗?
老司机应该看出来了,新手可能摸不着头脑。
在任务2中,进行了2次加锁、解锁,而且“环环相扣”。
Mutex互斥锁问题
假如任务1、 任务2、 任务3优先级分别为:1、 2、 3。
优先级顺序就是:任务1 > 任务2 > 任务3(数字越小代表任务优先级越高)。
假设:任务1和任务2处于等待事件状态,也就是处于阻塞状态, task 3 处于运行状态。
当任务3在“加锁处理事情”的时候,任务2抢占了任务3(任务2挂起时间到了),此时任务3挂起,任务2处于运行状态;
如果任务2在“互斥锁1加锁”之后,任务1抢占了任务2,此时,任务1处于运行状态;
这个时候,你发现问题了没有?
任务1在执行“OSMutex1_Pend();”会等待“互斥锁1解锁”,如果其他方式没有对“互斥锁1解锁”,则会出现“死锁”的情况。
分享一张图片,你就会明白什么是死锁了:
解决办法
比如对任务2加锁方式进行改善:
void task2(){/*do something*/OSMutex1_Pend(); //互斥锁1加锁/*do something*/OSMutex1_Post(); //互斥锁1解锁OSMutex2_Pend(); //互斥锁2加锁/*do something*/OSMutex2_Post(); //互斥锁1解锁}
或者对低优先级的任务3加锁方式进行改善:
void task3(){/*do something*/OSMutex1_Pend(); //互斥锁1加锁OSMutex2_Pend(); //互斥锁2加锁/*加锁处理事情*/OSMutex2_Post(); //互斥锁2解锁OSMutex1_Post(); //互斥锁1解锁}
出问题的原因, 当一个任务获得了临界区资源的锁,在没有释放这个锁的前提下又去获得另外一块临界区资源,这个时候就要引起足够的注意了,设计成败在于你是否彻底理解了之前的问题。
但是,归根到底这样的问题还是要求用户在设计阶段去避免,一个系统不可能是万能的,正确的设计才是最重要的。
原文标题:RTOS 任务间互斥的难题
文章出处:【微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
串口
+关注
关注
14文章
1555浏览量
76605 -
RTOS
+关注
关注
22文章
815浏览量
119702
原文标题:RTOS 任务间互斥的难题
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
详解linux内核中的mutex同步机制

【MiCOKit试用体验】庆科MiCO系统篇(3)MiCO RTOS互斥锁
小熊派华为物联网操作系统LiteOS内核教程05-互斥锁
BearPi-HM_Nano开发板鸿蒙OS内核编程开发——互斥锁
如何在RK2206上使用鸿蒙LiteOS-M内核接口进行互斥锁编程开发
Linux多线程同步互斥量Mutex详解
Linux 多线程互斥量互斥
详谈Linux操作系统编程的互斥量mutex





 工商网监
工商网监
评论