 ABB机器人示教器入门-初级教学
ABB机器人示教器入门-初级教学
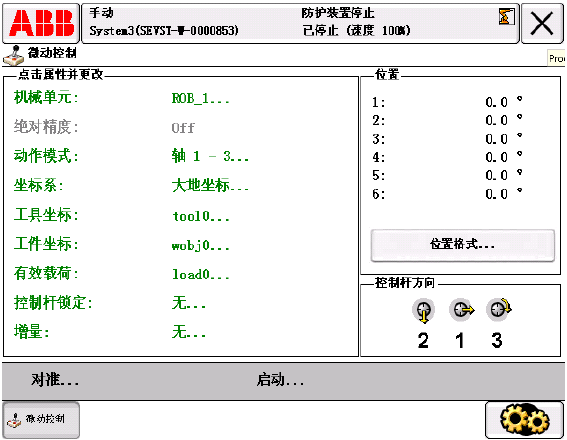
手动操作窗口示意图: 步骤1、将机器人操作模式选择器置于手动限速模式。步骤2、在ABB菜单中,单击手动操纵打开手动操纵窗口。
 机械单元:步骤1、打开手动操纵窗口,并点击机械单元。步骤2、在弹出的窗口中选择需要进行控制的机械单元,然后点击确定。
机械单元:步骤1、打开手动操纵窗口,并点击机械单元。步骤2、在弹出的窗口中选择需要进行控制的机械单元,然后点击确定。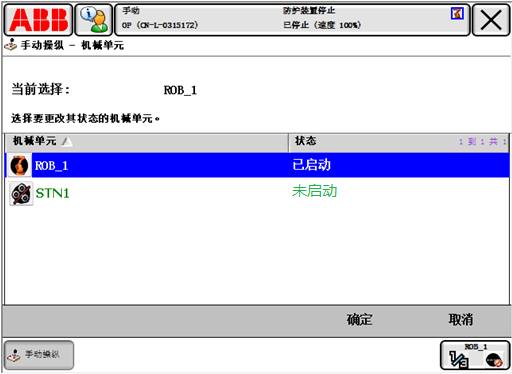 运动模式:步骤1、打开手动操纵窗口,并点击动作模式。步骤2、在弹出的窗口中选择所需模式,然后点击确定。
运动模式:步骤1、打开手动操纵窗口,并点击动作模式。步骤2、在弹出的窗口中选择所需模式,然后点击确定。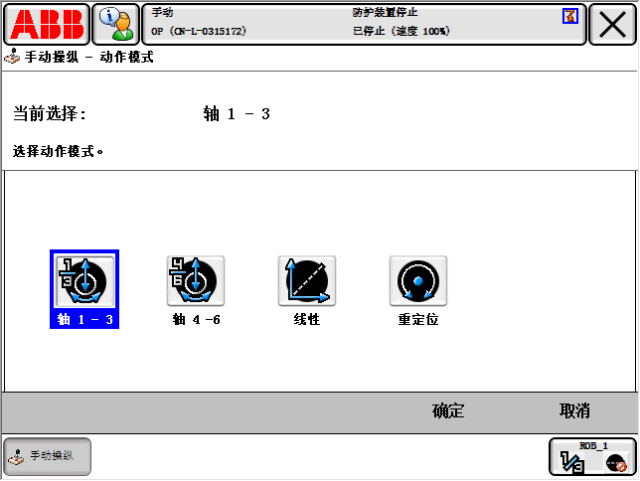 单轴运动Axis 1-3 轴 1-3
单轴运动Axis 1-3 轴 1-3 机器人一、二、三每个转轴单独转动。
机器人一、二、三每个转轴单独转动。 Axis 4-6 轴 4-6
Axis 4-6 轴 4-6 机器人四、五、六每个转轴单独转动。
机器人四、五、六每个转轴单独转动。 单轴运动何时使用比较好呢?(1)将机械单元移出危险位置;(2)将机器人移出奇点;(3)定位机器人轴,以便进行校准。注:机器人外轴运动必须为单轴运动;为了更精确校准,可使用微动控制。
重定位运动姿态运动:机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
单轴运动何时使用比较好呢?(1)将机械单元移出危险位置;(2)将机器人移出奇点;(3)定位机器人轴,以便进行校准。注:机器人外轴运动必须为单轴运动;为了更精确校准,可使用微动控制。
重定位运动姿态运动:机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
 注:重定位运动时,必须先选择工具坐标。
线性运动基坐标何时使用:当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。在许多情况下,基坐标系是使用最为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。
注:重定位运动时,必须先选择工具坐标。
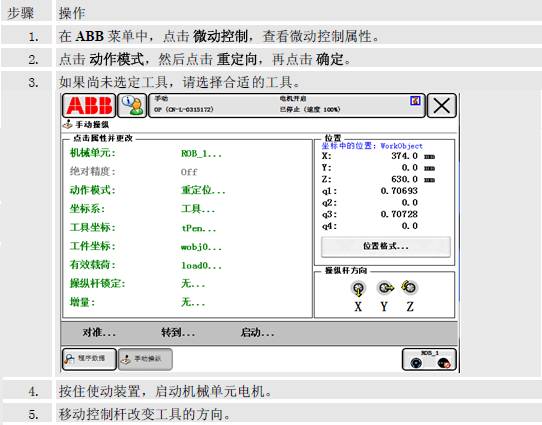
线性运动基坐标何时使用:当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。在许多情况下,基坐标系是使用最为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。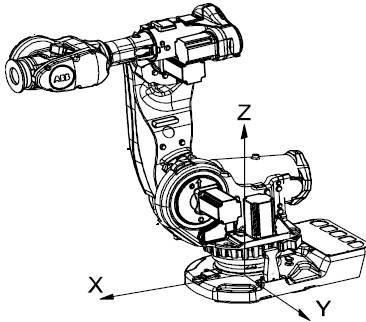 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性;(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤;(3)点击坐标系,然后点击基坐标,再点击确定;(4)按住使动装置,启动操纵器电机;(5)移动控制杆,机械单元将随之移动;
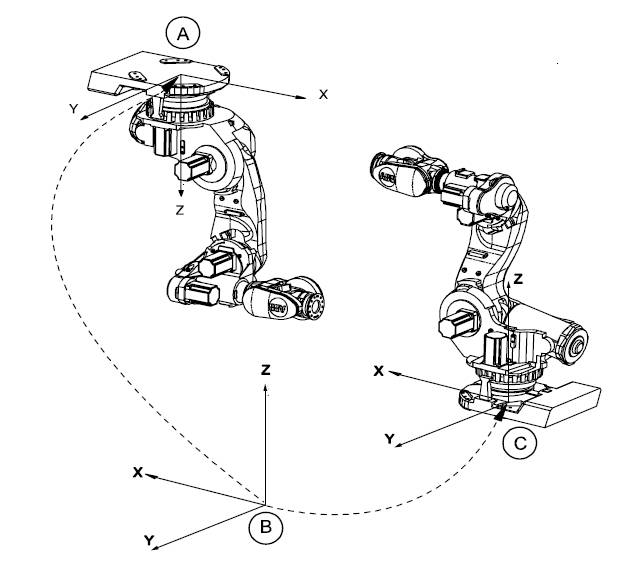
线性运动大地坐标何时使用:例如:有两个机器人,一个安装于地面,一个倒置。代表机器人的基坐标系也将上下颠倒。如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性;(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤;(3)点击坐标系,然后点击基坐标,再点击确定;(4)按住使动装置,启动操纵器电机;(5)移动控制杆,机械单元将随之移动;
线性运动大地坐标何时使用:例如:有两个机器人,一个安装于地面,一个倒置。代表机器人的基坐标系也将上下颠倒。如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。
 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击坐标系,然后点击基坐标,再点击确定。(4)按住使动装置,启动操纵器电机。(5)移动控制杆,机械单元将随之移动。
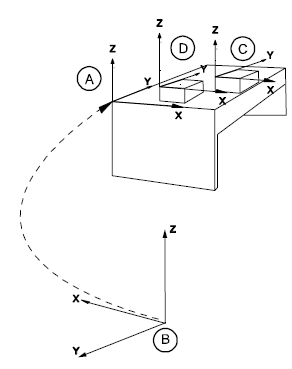
线性运动工件坐标何时使用:例如:工厂打算确定一系列孔的位置,以便沿着工件边缘钻孔。工厂打算在工件箱的两面隔板之间焊接。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击坐标系,然后点击基坐标,再点击确定。(4)按住使动装置,启动操纵器电机。(5)移动控制杆,机械单元将随之移动。
线性运动工件坐标何时使用:例如:工厂打算确定一系列孔的位置,以便沿着工件边缘钻孔。工厂打算在工件箱的两面隔板之间焊接。
 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击工件以选择工件。(4)点击工具以选择工具。(5)点击有效载荷以选择有效载荷(6)点击坐标系,然后点击工件,再点击确定。(7)按住使动装置,启动操纵器电机。(8)移动控制杆,机械单元将随之移动。
线性运动工具坐标何时使用:使用工具体系对穿、钻、铣、锯等进行编程和调整
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击工件以选择工件。(4)点击工具以选择工具。(5)点击有效载荷以选择有效载荷(6)点击坐标系,然后点击工件,再点击确定。(7)按住使动装置,启动操纵器电机。(8)移动控制杆,机械单元将随之移动。
线性运动工具坐标何时使用:使用工具体系对穿、钻、铣、锯等进行编程和调整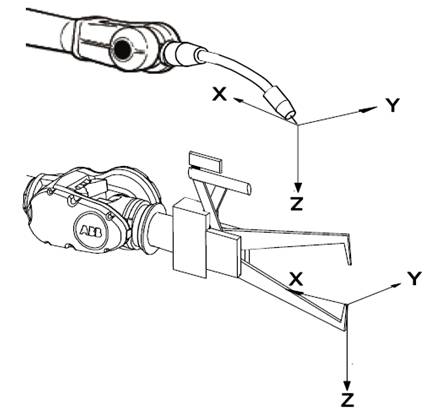 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)选择合适的工具。(4)点击坐标系,然后点击工具,再点击确定。(5)按住使动装置,启动机械单元电机。(6)移动控制杆,机械单元将随之移动。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)选择合适的工具。(4)点击坐标系,然后点击工具,再点击确定。(5)按住使动装置,启动机械单元电机。(6)移动控制杆,机械单元将随之移动。审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28380浏览量
206918 -
ABB
+关注
关注
26文章
523浏览量
52710
原文标题:ABB机器人示教器入门-初级教学|干货
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
智能拖动示教喷涂机器人:技术革新与未来展望
智能拖动示教喷涂机器人是近年来工业自动化领域的一项重要创新,它的出现不仅极大地提升了喷涂作业的效率和质量,还为传统制造业的转型升级提供了有力支持。本文将从智能拖动示


什么是拖动示教?机器人拖动示教方式分析
随着拖动示教在协作机器人、并联机器人上的应用,将调试技术趋向快速、简便的方向发展,满足生产企业应用机器人进行及时、高效的生产需求,以及在工业

基于导纳控制的机器人拖动示教原理和实现步骤
(Admittance)模型描述。导纳模型类似于弹簧和阻尼器的组合,用来描述机器人对外部力和运动的响应。机器人拖动示教系统DMC600M
焊接机器人示教模式怎么设置
在现代制造业中,焊接机器人广泛应用于提高生产效率和焊接质量。而焊接机器人示教模式的正确设置,是确保自动化焊接过程精确执行的重要环节。今天创想智控焊缝跟踪系统小编带大家了解焊接

abb机器人系统如何添加选项
ABB机器人系统是一种广泛应用于工业生产领域的自动化设备。在实际应用中,用户可能需要对机器人系统进行一些配置和设置,以满足特定的生产需求。本文将详细介绍如何在ABB
工业机器人abb左边布局没了怎么办
在工业机器人领域,ABB(Asea Brown Boveri)是全球领先的制造商之一,其产品广泛应用于汽车、电子、食品和饮料等行业。ABB机器人的左边布局通常指的是
abb机器人movej和movel的区别
ABB机器人是一种广泛应用于工业自动化领域的智能设备,具有高度的灵活性和可靠性。在ABB机器人的编程和操作中,movej和movel是两种常用的运动指令。本文将详细介绍movej和mo
abb工业机器人的编程语言是什么
ABB工业机器人的编程语言主要是RAPID(Robot Application Programming Interface for Development),它是一种高级编程语言,专门为工业机器人
基于RK3568核心板的工业示教器解决方案
机器人作为现代制造业中的重要一环,在生产效率、产品质量和劳动安全等方面带来了巨大的提升,给企业带来了巨大的竞争优势。但机器人的应用存在开发难、安全性差等问题。“示教






 工商网监
工商网监
评论