 BLKMOV:存储区移动(SFC20)
BLKMOV:存储区移动(SFC20)
BLKMOV:存储区移动(SFC20)
使用“块移动”指令,可将存储区(源区域)的内容移动到其它存储区(目标区域)。移动操作沿地址升序方向执行。可使用 ANY 指针定义源区域和目标区域。
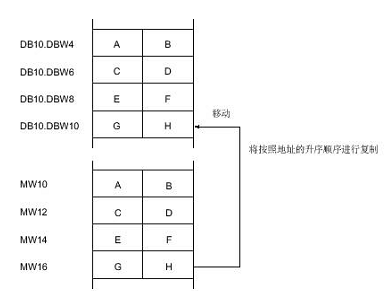
移动操作的通用规则
源区域和目标区域不得重叠。如果源和目标区域长度不同,则只能移动较小长度的区域。
如果源区域小于目标区域,则将整个源区域的数据都写入到目标区域中。而目标区域的其余字节则保持不变。
如果目标区域小于源区域,将写满整个目标区域。而忽略源区域的剩余字节。
如果复制 BOOL 数据类型的区域,则此区域的指定长度必须是 8 的整数倍,否则将无法执行指令。
移动字符串的规则
还可以使用“块移动”指令移动 STRING 数据类型的源区域和目标区域。如果只有源区域为 STRING 数据类型,则移动字符串中实际包含的字符。有关实际和最大长度的信息,将写入目标区域。如果源和目标区域都是 STRING 数据类型,则将目标区域中字符串的当前长度设置为实际移动的字符数。
如果要移动字符串实际长度和最大长度的信息,则需要以字节为单位将相关区域指定给 SRCBLK 和DSTBLK 参数。
函数值 (RET_VAL) INT 错误信息
0000 无错误
8092 源或目标区域只能在装载存储器中。
8xyy 有关错误的更多信息,
使用复杂参数类型ANY:
STEP 7以10个字节存储参数类型ANY。当构造类型为ANY的参数时,必须确保所有10个字节都被占用,因为调用块估计参数整个内容的值。例如,如果以字节4指定DB编号,也必须以字节6明确地指定存储器区。
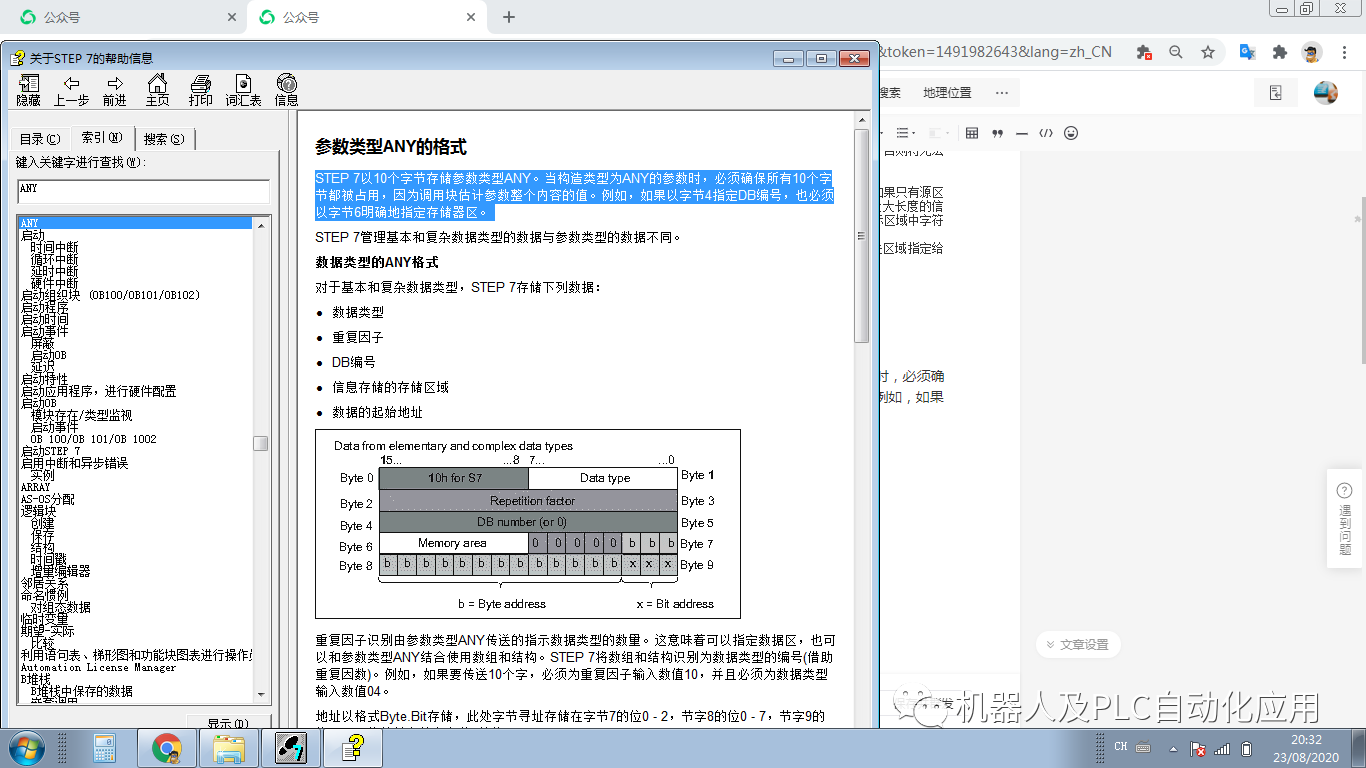
参数类型的ANY格式
对于参数类型,STEP 7存储数据类型和参数的地址。重复因子始终是1。字节4、5和7始终是0。字节8和9指示定时器、计数器或块的编号。
重复因子识别由参数类型ANY传送的指示数据类型的数量。这意味着可以指定数据区,也可以和参数类型ANY结合使用数组和结构。STEP 7将数组和结构识别为数据类型的编号(借助重复因数)。例如,如果要传送10个字,必须为重复因子输入数值10,并且必须为数据类型输入数值04。
地址以格式Byte.Bit存储,此处字节寻址存储在字节7的位0 - 2,节字8的位0 - 7,节字9的位3 - 7。位地址存储在字节9的位0 - 2。
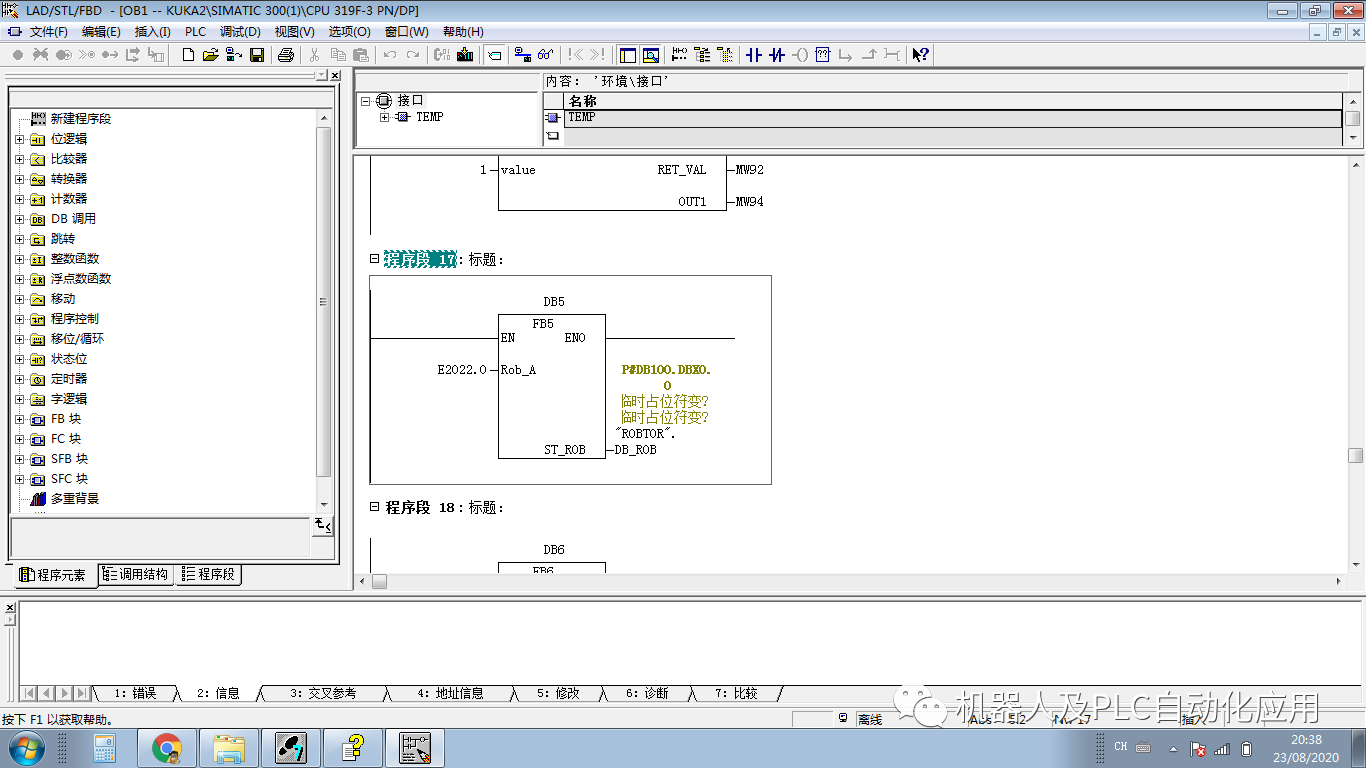
FUNCTION_BLOCK FB5
VAR_INPUT
Rob_A:POINTER;机器人的地址
pRobAAT Rob_A: STRUCT拆分地址
DBNR:WORD;
BZ:DWORD;
END_STRUCT;
END_VAR
VAR_OUTPUT
ST_ROB:ST_Rob;
END_VAR
VAR_TEMP
Adr_Rob_A:INT ;
AnyRob_A:ANY;
pRob_AAT AnyRob_A: STRUCT
SyntaxId:BYTE;// Byte 0
DataType:BYTE;// Byte 1
DataCount:WORD;// Byte 2+3
DBNR:WORD;// Byte 4+5
BZ:DWORD;// Byte 6
END_STRUCT;
AnyST_ROB:ANY;
pST_ROBAT AnyST_ROB: STRUCT
SyntaxId: BYTE;// Byte 0
DataType: BYTE;// Byte 1
DataCount:WORD;// Byte 2+3
DBNR:WORD;// Byte 4+5
BZ:DWORD;// Byte 6
END_STRUCT;
AnyST_ROB_A_Rob:ANY;
pST_ROB_A_RobAT AnyST_ROB_A_Rob: STRUCT
SyntaxId: BYTE;// Byte 0
DataType: BYTE;// Byte 1
DataCount:WORD;// Byte 2+3
DBNR:WORD;// Byte 4+5
BZ:DWORD;// Byte 6
END_STRUCT;
erg_SFC20:INT;用于SFC20的变量反馈点
END_VAR
VAR
END_VAR
Adr_Rob_A := WORD_TO_INT(DWORD_TO_WORD(SHR(IN:=pRobA.BZ,N:=3)));提取IO点地址
pRob_A.SyntaxId:= B#16#10;
pRob_A.DataType:= 02;
pRob_A.DataCount:= W#16#22;
pRob_A.DBNR:= pRobA.DBNR;
pRob_A.BZ:= pRobA.BZ;
AnyST_ROB := ST_ROB.A1_8_Folgespiegelung;DB块首位
pST_ROB.SyntaxId:= B#16#10;
pST_ROB.DataType:= 02;
pST_ROB.DataCount:= W#16#22;
AnyST_ROB_A_Rob:= ST_ROB.A_Rob;
pST_ROB_A_Rob.SyntaxId:= B#16#10;
pST_ROB_A_Rob.DataType:= 02;
pST_ROB_A_Rob.DataCount:= W#16#22;
erg_SFC20 := BLKMOV(SRCBLK :=AnyRob_A
,DSTBLK:=AnyST_ROB
);传输机器人的输出状态
erg_SFC20 := BLKMOV(SRCBLK :=AnyST_ROB
,DSTBLK:=AnyST_ROB_A_Rob
);
END_FUNCTION_BLOCK
---------------------------------END--------------------------
审核编辑 :李倩
-
存储
+关注
关注
13文章
4368浏览量
86263 -
参数
+关注
关注
11文章
1862浏览量
32460
原文标题:使用复杂参数类型
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

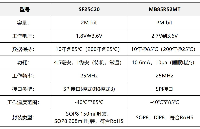
舜铭存储铁电存储器SF25C20替换MB85RS2MT性能及应用优势有哪些?
西部数据纪念移动存储系列 20 周年里程碑,推出标志性产品全新限定版本
移动存储介质不得在什么和什么之间交叉使用
华为SPN助力杭州移动5G-A全球标杆应用示范区建设

PLC顺序功能图(SFC)编程深入解析






 工商网监
工商网监
评论