 KUKA机器人CWRITE函数的用法说明
KUKA机器人CWRITE函数的用法说明
命令通道 $ FCT_CALL 的管理编号(句柄)
CWRITE() 函数可用于通过 $FCT_CALL 命令通道调用函数。变量本身是写保护的。
例如:
EKI_STATUS = EKI_Init(CHAR[])初始化TCP/IP通讯通道
EKI_STATUS = EKI_Open(CHAR[])打开TCP/IP通讯
EKI_STATUS = EKI_Close(CHAR[])关闭TCP/IP通讯
EKI_STATUS = EKI_Clear(CHAR[])清除TCP/IP通讯通道里的内容
这些通讯功能函数最终都会通过下列运算来实现控制:
初始化TCP/IP通讯通道
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Init",strChannelName[])
关闭TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Close",strChannelName[])
打开TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Open",strChannelName[])
清除TCP/IP通讯通道里的内容
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Clear",strChannelName[])
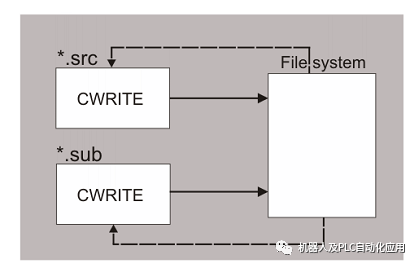
通过命令通道$ FCT_CALL进行通讯
机器人控制器通过加载的外部模块从另一个控制器(例如从摄像机系统)接收位置数据。机器人控制器使用CREAD从外部模块读取这些位置数据。CWRITE可用于通过命令通道在文件系统上执行操作。示例:通过命令通道打开文件,然后在文件中写入一个字符或字符串。可以从机器人解释程序或提交解释程序调用文件系统功能。不允许从一个解释器打开文件然后从另一个解释器访问文件,例如 写入或再次关闭文件。
调用文件系统功能时,会将特定数量的参数传输到该功能。这些函数中的每一个都通过CWRITE提供返回值。返回值指示该函数是成功执行还是因错误而中止。如果发生错误,可以使用返回的错误号来定位原因。
通过命令通道$ FCT_CALL进行通信
原文标题:KUKA 机器人变量$ FCT_CALL在TCP/IP的应用
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
211文章
28466浏览量
207317 -
通信
+关注
关注
18文章
6036浏览量
136070 -
函数
+关注
关注
3文章
4333浏览量
62692
原文标题:KUKA 机器人变量$ FCT_CALL在TCP/IP的应用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA机器人问题解答
库卡KUKA机器人四种启动方式介绍
KUKA焊接机器人伺服电机常见故障及维修处理
库卡机器人MGV电源模块维修
KUKA-C4机器人SWRITE函数的用法说明

KUKA机器人高级编程CWRITE的用法
KUKA机器人高级编程CWRITE的用法
教你如何去使用KUKA机器人高级编程CWRITE
KUKA机器人高级编程CWRITE的用法V3.1
KUKA机器人高级编程CWRITE的用法
浅谈KUKA机器人CWRITE编程用法





 工商网监
工商网监
评论