 YOLOX模型ONNX格式说明
YOLOX模型ONNX格式说明

yolox 推理openvino与c++支持
YOLOX模型ONNX格式说明
我记得大概是在去年七月份的时候我写过一篇文章是介绍YOLOX+OpenVINO推理的,下载YOLOX的ONNX格式模型(github上可以下载)
https://github.com/Megvii-BaseDetection/YOLOX/tree/main/demo/ONNXRuntimehttps://github.com/Megvii-BaseDetection/YOLOX/releases/download/0.1.1rc0/yolox_s.onnx
下载ONNX格式模型,打开之后如图:
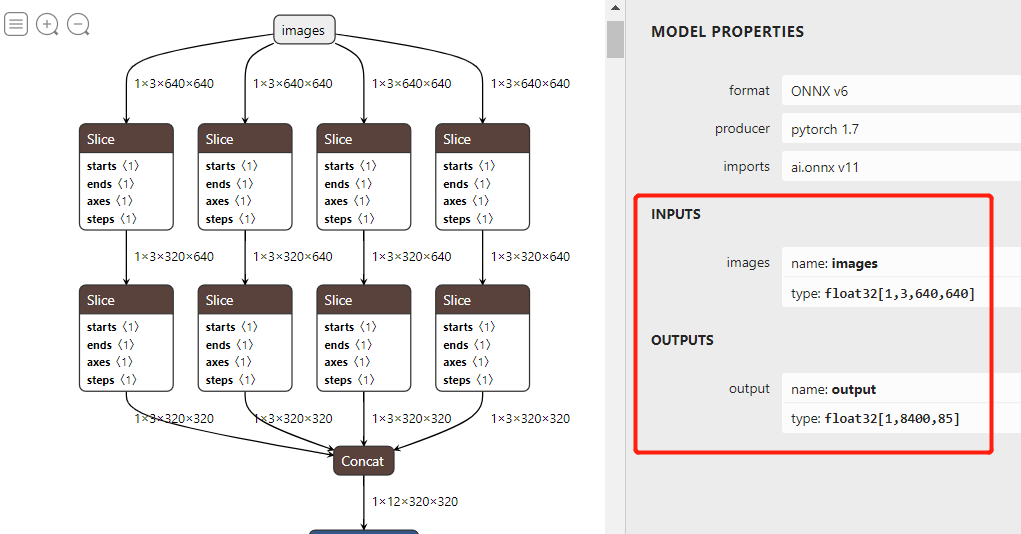
输入格式:1x3x640x640,默认BGR,无需归一化。输出格式:1x8400x85
01
什么是85
其中85的前四个是cx、cy、w、h大小,第五个是object预测得分,后面80个是COCO类别。
02
什么是8400
模型在数据输入端几乎与YOLOv5的代码一致,没有什么特别之处,唯一不同的在于输出层的解析,是把三个不同的输出层合并在一个里面了,分别是80x80, 40x40, 20x20, 每个特征点预测,所以总数才会是80x80+40x40+20x20 =8400
03
输出层解析解密
最后一层输出,这点跟YOLOv5最新版本输出层有点相似,但是YOLOv5的输出层更近一步,已经计算了相关的矩形框位置信息,直接输出就是绝对位置信息,而YOLOX还是输出原始的相对位置信息,需要解析一波才行(跟最新的YOLOv5相同),说明YOLOX的工程化方面还有待提升!不是开源就完事了!
OpenVINO推理解析
必须说明一点,参考了官方的部分代码,然后在上面猛改一通(原因是官方代码写的不是很好),改完之后,封装成一个类了,主要的方法跟我封装的YOLOv5的推理类相似,导出了两个函数方法
void YOLOXDetector::string onnxpath, float nms, float score)
该方法表示初始化IE,然后加载模型,设置nms阈值与置信度阈值score,创建一个推理请求,同时初始化每一层上对应每个特征点尺度比率。这部分的代码如下:
voidYOLOXDetector::initConfig(std::stringonnxpath,floatnms,floatscore){
this->nms_threshold=nms;
this->score_threshold=score;
Coreie;
CNNNetworknetwork=ie.ReadNetwork(onnxpath);
InputInfo::Ptrinput_info=network.getInputsInfo().begin()->second;
this->input_name=network.getInputsInfo().begin()->first;
DataPtroutput_info=network.getOutputsInfo().begin()->second;
this->out_name=network.getOutputsInfo().begin()->first;
output_info->setPrecision(Precision::FP32);
ExecutableNetworkexecutable_network=ie.LoadNetwork(network,"CPU");
this->infer_request=executable_network.CreateInferRequest();
std::vector<int>strides={8,16,32};
generate_grids_and_stride(INPUT_W,INPUT_H,strides,grid_strides);
}
检测函数
void detect(cv::Mat & frame, std::vector&results);
该方法完成检测,并把检测结果作为resulte返回,相关的代码实现可以参考之前的文章,感觉并没有什么不同,其中最大的不同的地方是对输出结果的解析,这边代码作为单独的方法函数实现如下(参考官方):
voidYOLOXDetector::generate_yolox_proposals(std::vectorgrid_strides,constfloat*feat_ptr,floatprob_threshold,std::vector&objects)
{
constintnum_anchors=grid_strides.size();
for(intanchor_idx=0;anchor_idx< num_anchors; anchor_idx++)
{
constintgrid0=grid_strides[anchor_idx].grid0;
constintgrid1=grid_strides[anchor_idx].grid1;
constintstride=grid_strides[anchor_idx].stride;
constintbasic_pos=anchor_idx*(NUM_CLASSES+5);
//yolox/models/yolo_head.pydecodelogic
floatx_center=(feat_ptr[basic_pos+0]+grid0)*stride;
floaty_center=(feat_ptr[basic_pos+1]+grid1)*stride;
floatw=exp(feat_ptr[basic_pos+2])*stride;
floath=exp(feat_ptr[basic_pos+3])*stride;
floatx0=x_center-w*0.5f;
floaty0=y_center-h*0.5f;
floatbox_objectness=feat_ptr[basic_pos+4];
for(intclass_idx=0;class_idx< NUM_CLASSES; class_idx++)
{
floatbox_cls_score=feat_ptr[basic_pos+5+class_idx];
floatbox_prob=box_objectness*box_cls_score;
if(box_prob>prob_threshold)
{
DetectResultobj;
obj.box.x=x0;
obj.box.y=y0;
obj.box.width=w;
obj.box.height=h;
obj.classId=class_idx;
obj.score=box_prob;
objects.push_back(obj);
}
}
}
}
最终调用该类实现推理就显得特别简单,对图像跟视频都是一样,使用下面的代码:
detector->initConfig(this->settings->getOnnxModelPath(),score,conf);
std::vectorresults;
detector->detect(frame,results);
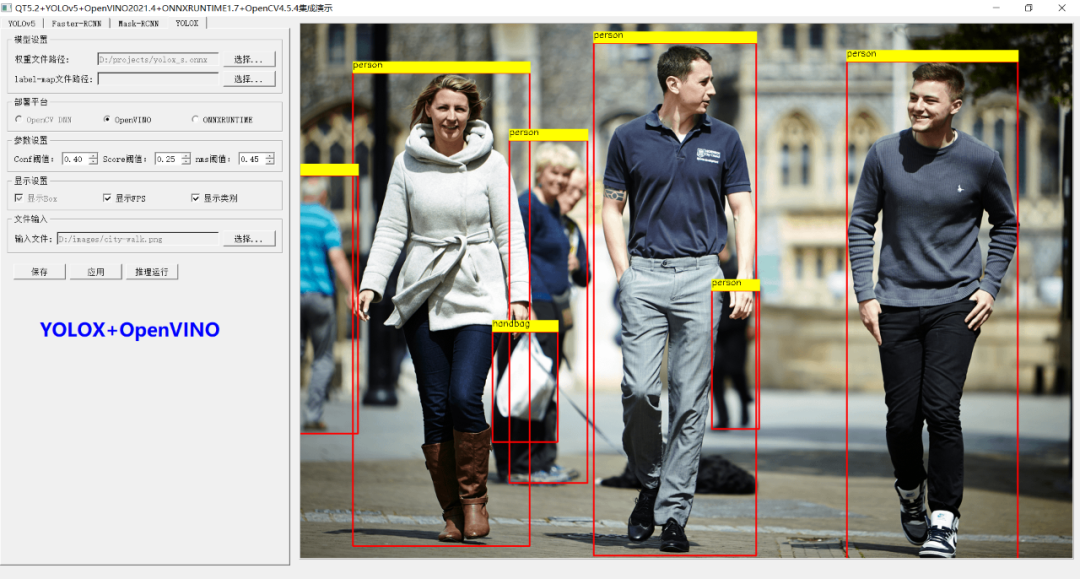
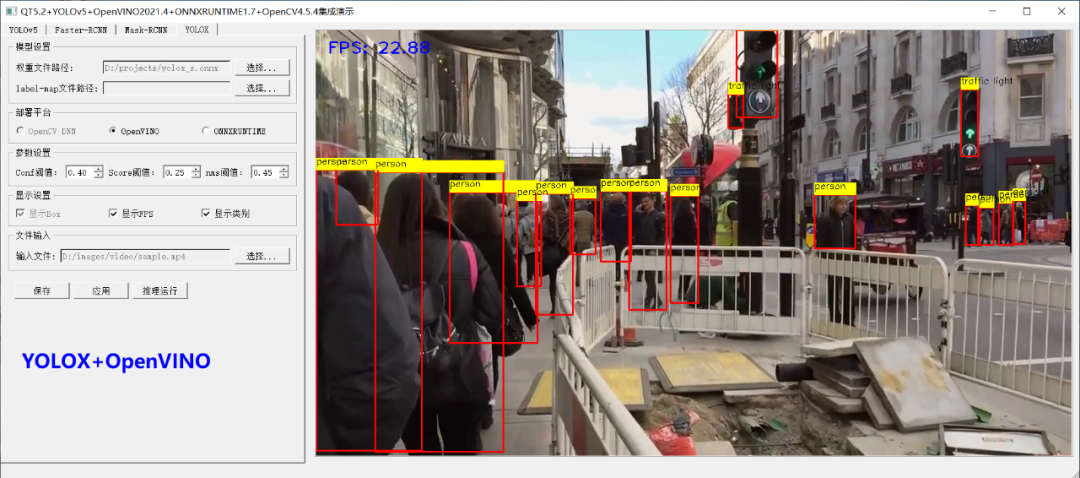
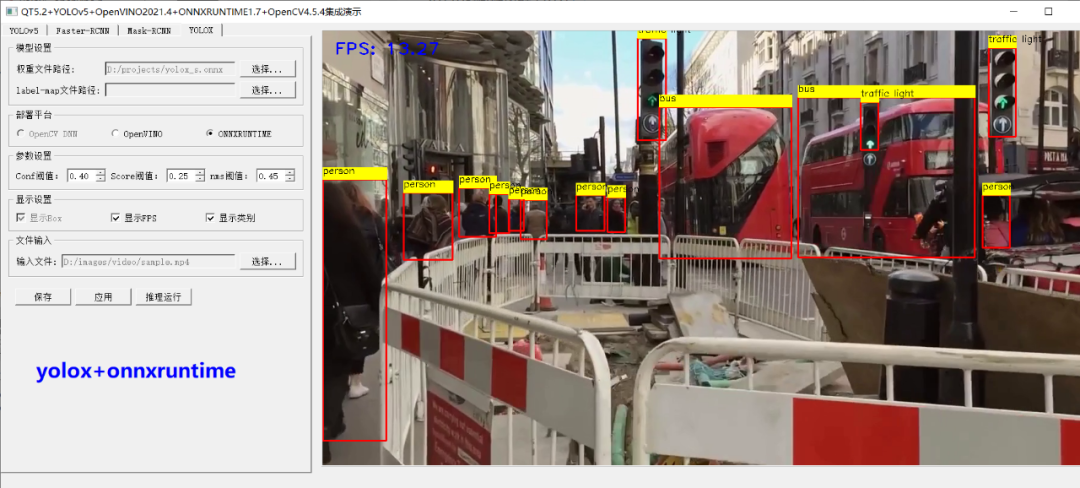
最后我发现在onnxruntime上面也一样可以,基本上重用了大部分的代码,然后把它们与我之前写YOLOv5+QT的演示整合了一下,这样就变成YOLOv5+YOLOx支持OpenVINO/ONNXRUNTIME全部可行的推理,可以自由的通过界面切换!
运行结果如下(请允许我show一下界面):
扫码查看OpenCV+Pytorch系统化学习路线图
原文标题:OpenVINO +YOLOX最新版本推理演示
文章出处:【微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
-
格式
+关注
关注
0文章
23浏览量
17312 -
模型
+关注
关注
1文章
3865浏览量
52327 -
推理
+关注
关注
0文章
9浏览量
7425
发布评论请先 登录
yolox_bytetrack_osd_encode示例自带的yolox模型效果不好是怎么回事?
使用模型优化器命令将ONNX模型转换为OpenVINO™ IR格式时出现“ReplacementID”错误怎么解决?
ONNX模型无法转换为IR v10,为什么?
将ONNX模型转换为中间表示 (IR) 格式,收到了错误的输出是怎么回事?
EIQ onnx模型转换为tf-lite失败怎么解决?
yolov7 onnx模型在NPU上太慢了怎么解决?
将YOLOv5 ONNX模型转换为中间表示(IR)格式时,收到与节点相关的错误怎么解决
将TensorFlow Lite模型转换为ONNX
ONNX格式模型部署兼容性框架介绍

通过新的ONNX导出器简化模型导出流程




评论