 KUKA机器人吸盘真空阀的使用
KUKA机器人吸盘真空阀的使用
机器人程序:
F17-F22 对应控制吸盘1-6 用于控制吸盘的开关
M63,M64-M68 吸盘状态检测
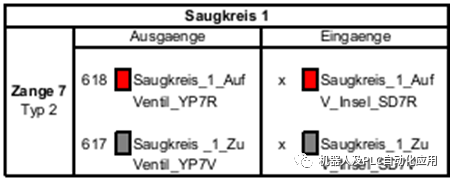
A/E617-628吸盘
钳工具:
SPS MAKRO342 夹抓/吸盘打开
SPS MAKRO343 夹抓/吸盘关闭
SPS MAKRO340 关闭阀控制
F53 关闭吸盘吸气后,不使用关闭吹气,-用于一体阀
F54 是否自动关闭反向吹气的真空阀
F55 第3个阀导的开启先导阀
F56 第2个阀导的开启先导阀
F57 用第1阀导的开启先导阀
F523-带先导阀-
F524-不带先导阀-
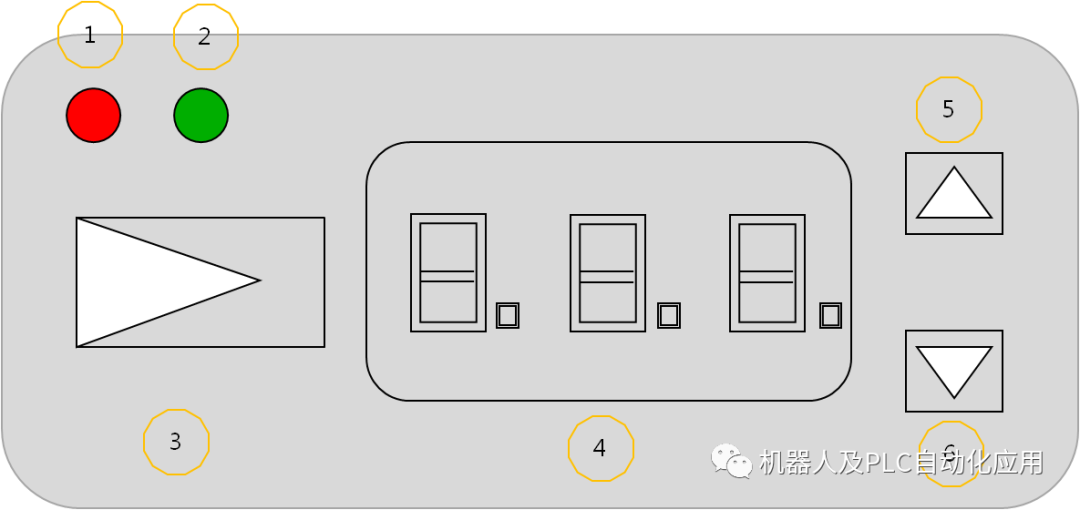
显示介绍:
1、Output1,LED显示红色。
2、Output2,LED显示绿色。
3、Mode按键,用于选择不同的调整程序。
4、数码管显示,测量模式时,显示真空阀真空状态,调整参数时显示不同的选项。
5、Up按键,调整数值。
6、Down按键,调整数值。
锁屏和开锁


开锁和锁屏都是用一样的键.Lo C /U n C
1、按住“Mode”键再按“Up”键,出现“out1”及“no”,用“↑↓”键选择out1是常开还是常闭,并用“Mode”键确认。
工作模式:
1、滞后模式(HyS): 以Out1,NO为例,H:关断值 ;h:滞后值 当真空阀内的负压达到H时,真空阀Out1输出1,直到真空阀内压力减小到h,真空阀Out1输出0。( 负压力
2、比较模式(CnP): 以Out2,NO为例,A:基础值 ;b:峰值 当真空阀内的负压达到A且小于b时,真空阀OUT2输出1,其他压力时Out2为0。( 负压力
Out1工作模式选择:
1、 按“Mode”键2次,数码管显示“2”,等待2秒后“Out1”及其工作方式(默认是HyS)交替显示,通过“Up”和“Down”键来选择工作方式,并用“Mode”键确认。
2、 按“Mode”键4次,数码管显示“4”,等待2秒后“Out2”及其工作方式(默认是HyS)交替显示,通过“Up”和“Down”键来选择工作方式,并用“Mode”键确认。
审核编辑 :李倩


-
led
+关注
关注
242文章
23308浏览量
661598 -
机器人
+关注
关注
211文章
28512浏览量
207505 -
数码管
+关注
关注
32文章
1882浏览量
91243
原文标题:KUKA机器人吸盘真空阀的使用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块

开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系







 工商网监
工商网监
评论