 KUKA机器人利用WorkVisual拓扑结构诊断网络故障
KUKA机器人利用WorkVisual拓扑结构诊断网络故障
拓扑结构诊断
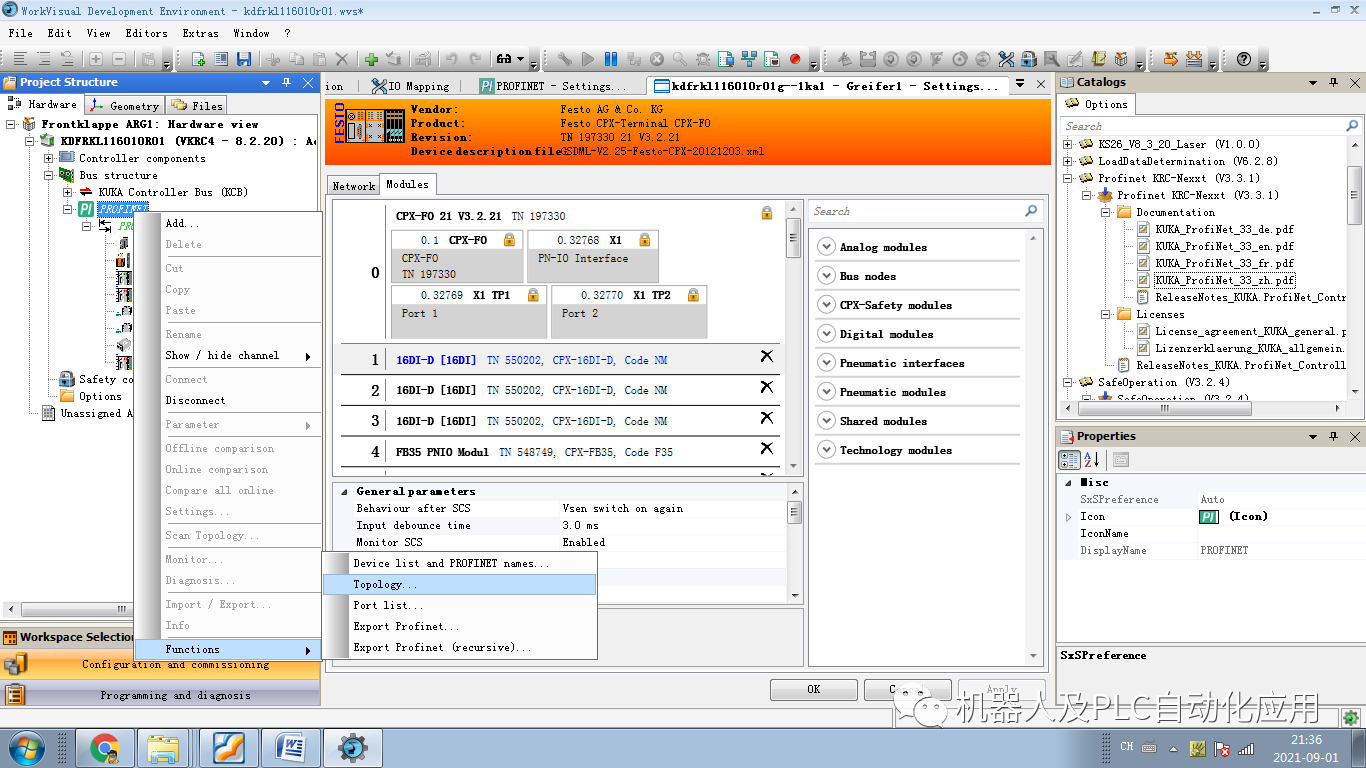
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 选中 PROFINET 节点。
3. 点击按钮 。选项卡 拓扑结构 显示。
。选项卡 拓扑结构 显示。
操作步骤
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 在树状结构中点击 PROFINET并在弹出菜单中选择连接。
3. 用右键点击 PROFINET 并在快捷菜单中选择 功能 > 拓扑 ...。选项卡拓扑即被显示。
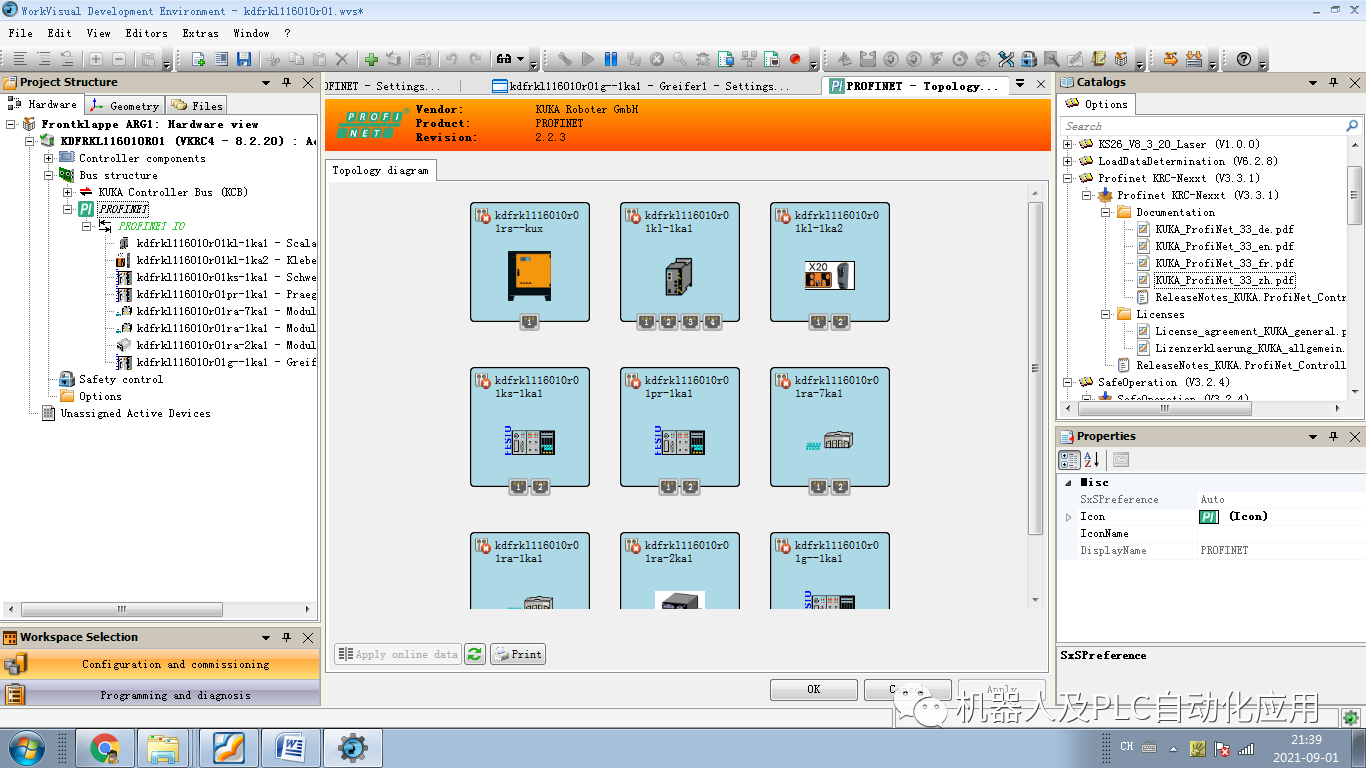
如果设备显示为白色,则存在一个与此设备的连接。如果设备显示为灰色,则不存在与此设备的连接。
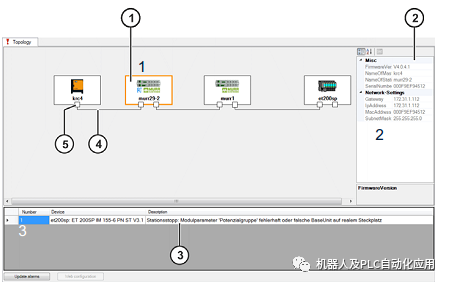
2. 参数窗口
为所选的设备显示不同的参数。
3. 信息窗口
如果设备报错,则显示该信息提示窗口。点击 更新警报 按钮可更新显示。
4.按钮网络配置可打开设备的网络界面。在此可执行设备诊断或更改设备配置。
5. 连接电缆.
6.接口-已连接的接口显示为白色,未连接的显示为灰色。
---我们通过拓扑的诊断功能可以更直观的发现问题,同时根据报警提示查找网络故障的问题点,缩短维修时间是比较快速有效的故障判断及处理的工具。
----------------END------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6537浏览量
110460 -
拓扑
+关注
关注
4文章
337浏览量
29567 -
KUKA机器人
+关注
关注
4文章
143浏览量
9051
原文标题:KUKA机器人利用WorkVisual拓扑结构诊断网络故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
分布式输电线路故障诊断装置 波形特征 拓扑结构 雷击类型细分 诊断渠道
分布式输电线路故障诊断装置DX-WPS100-GZ01鼎信充分利用行波定位原理,结合输电线路的拓扑结构,能够在故障发生时迅速捕捉到行波信号
FMEA在工业机器人故障预防中的应用
在工业自动化领域,FMEA(Failure Mode and Effects Analysis)不仅是一种分析方法,更是提升产品可靠性和安全性的关键工具。通过对工业机器人可能发生的各种故障模式进行
柔性机器人与刚性机器人区别与联系
柔性机器人和刚性机器人在结构、功能、应用场景等方面存在显著的区别,但也有一些联系。以下是它们的主要区别与联系: 区别 1.结构材料 柔性机器人

机器人神经网络系统的特点包括
机器人神经网络系统是一种模拟人类大脑神经网络的计算模型,具有高度的复杂性和灵活性。在本文中,我们将详细介绍机器人神经网络系统的特点,包括其
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52

网络拓扑结构有哪几种类型 网络拓扑结构优缺点
中心节点直接相连。中心节点负责转发和控制数据的流向,其他节点只需要与中心节点进行通信即可。这种拓扑结构简单、易于实现和维护,同时具有良好的扩展性和可靠性。然而,中心节点的故障会导致整个网络
红外热成像设备在机器人领域的应用
的应用,包括目标检测和识别、环境感知和导航、故障诊断与维护、搜救以及安全应用。目标检测和识别红外热成像设备可用于机器人上的目标检测和识别。通过捕捉物体的热分布图像,机

网络社交机器人检测的关键技术
在线社交网络面临着网络社交机器人操控的威胁,而现有的检测算法还不能缓解这种威胁。如何有效利用人工智能技术检测社交机器人,规避其潜在的风险并保
LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIE
发表于 12-21 20:03
更改KUKA C 4 Windows系统的密码
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。





 工商网监
工商网监
评论