 KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错
可能的原因
代替micro-RDC
解决用WorkVisual纠正配置
2.原因:WorkVisual中SYS-X42
配置错误
解决方用WorkVisual纠正配置
3.原因:KPC和CCU之间的连接(现场出的时候的主要原因)
有故障
解决方
更换错误布线
4.原因:OfficePC上的EtherCAT未正确连接(现场出的时候的主要原因)
解决
更换错误布线
下面看一下由于CCU引起的故障:
KPC和CCU之间的连接有故障
说明
KUKA控制器总线(KCB)的布线有故障。
通过以下电缆线路进行布线:
·CCU(X31)
·电缆W166356
。KPC
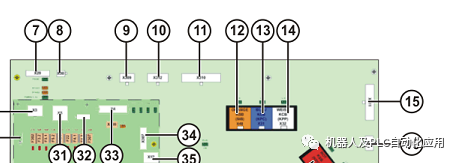
CCU上的X31接口
检测指令
1.检查插头连接器是否已正确连接。在此过程
中,需特别注意以下几点:
·针脚是否已压入
·是否有腐蚀
·触点是否被烧坏
。插头端子是否已顶出
·插头是否被插入正确的插槽
2.检查插头连接器是否具有电气功能。在此过
程中,需特别注意以下几点:
·芯线相互间有无错接
·接地芯线是否短路
·是否按照电路图正确布线

-----------------END---------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
连接器
+关注
关注
98文章
14585浏览量
136792 -
RDC
+关注
关注
0文章
24浏览量
9141
原文标题:KUKA C4 机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
的语音识别系统响应语音指令
为什么打造Tillu?
打造Tillu不仅是一个项目,更是一次学习体验。通过深入探索机器人技术、编程细节以及自定义动作和表情,释放你的创造力。无论你是学生、爱好者还是创
发表于 01-02 17:24
ADS131A02初始化失败的原因?
1.问题:ADS131A02初始化时,发送RESET指令后,可以接收到其响应FF02;但是接下来发送UNLOCK指令后,去接收不到其响应0655,用NULL指令去读取响应,也得不到。这是
发表于 12-10 06:19
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,机器人启
发表于 08-30 14:50
初始化sn65dsi后,读取0XE5寄存器,值一直为0x80,为什么?
?
mipi输出480M。
lvds-format = ;
out-face = ;
clock-frequency = &lt;85500000&gt;;
发表于 08-15 06:27
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
基于 ESP32 制造步行机器人,支持网络图像传输
MAKER: 陳亮
Strider 是 Wade Vagle 开发的机械步行机器人。它是基于 ESP32 摄像头和 3D 打印机身的且移动速度灵活便捷的爬行类的机器人。它经过的多次的迭代,不断优化
发表于 07-08 14:26
Al大模型机器人
理解能力强大: AI大模型机器人可以理解和生成自然语言,能够进行复杂的对话和语言任务。它们能够识别语言中的语义、语境和情感,并据此作出适当的回应。广泛的知识储备: 这些模型基于大规模的数据集进行训练,拥有
发表于 07-05 08:52

求助,ESP32自带的station例程为什么会定时自动初始化?
: 1
I (82437228) wifi:AP\'s beacon interval = 102400 us, DTIM period = 3
这是串口的数据,第一行显示wifi:state: run -&gt; init (
发表于 06-07 06:59
ESP32S3升级到4.4.4后wifi总是报auth -&gt; init (200),为什么?
(3183) wifi&lt;13,2&gt;, old:&lt;1,0
发表于 06-05 07:04
XMC4800实现Ecat,收到了无效直流计时器的警告,为什么?
= 20A10700
&lt;
DC
DC-Synchron
#x300
&lt; CycleTimeSync0 Factor=\"1\"&
发表于 05-31 08:21
DIY推荐!自制一个基于ESP32的沙画机器人
变形方面会有更好的效果,然而我需要ABS(丙烯腈-丁二烯-苯乙烯)的结构性能。
附上的照片展示了测试安装线性轴和导轨的情况。
步骤3:机器人组装
我在步进电机上加了4引脚的JST连接器,给
发表于 04-15 15:09
【开源作品】基于树莓派4B、ESP32制作的桌面机器人、气象站、立方光!
;gt;&gt;点此查看全文
基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派
发表于 03-05 16:52
MCU单片机GPIO初始化该按什么顺序配置?为什么初始化时有电平跳变?
GPIO初始化时有时钟配置、模式配置、输出配置、复用配置,那么在编写初始化代码时,到底该按什么顺序执行呢?如果顺序不当那初始化过程可能会出现短暂的电平跳变。






 工商网监
工商网监
评论