 浅谈机器人视觉抓件系统不到位问题
浅谈机器人视觉抓件系统不到位问题
最近视觉抓件系统一直会出现抓取零件不到位的问题。下面我将分析一下问题出现的原应。
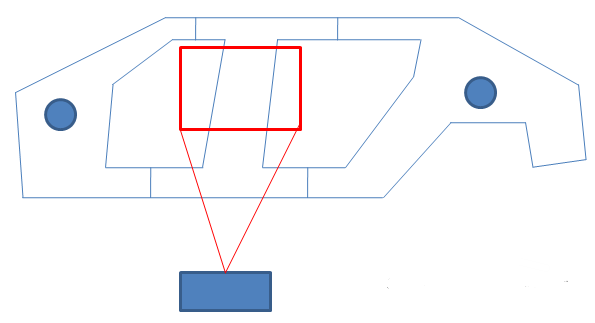
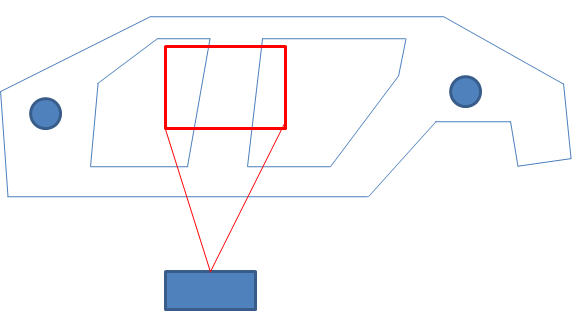
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量。因此对于车身整体的变化量存在偏差。零件大的组装件容易出现这种问题。因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法。
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值。由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值。这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
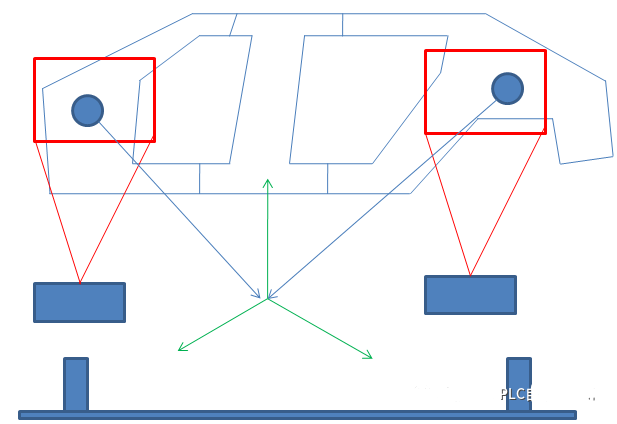
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的。整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28210浏览量
206545
发布评论请先 登录
相关推荐
机器人视觉——机器人的“眼睛”
的,也是急需的,它是保证机器人能够工作于人类生活环境的重要条件。在工作中图像采集速度较低,以及图像处理需要较长时间,给系统带来明显的时滞。而机器视觉产品的引进,极大的解决了这一题目。
发表于 01-23 15:02
码垛机器人夹抓可以实现多少种用途
``力泰科技资讯:码垛机械手作为工业码垛机器人的重要组成部分之一,可根据不同的产品,设计不同类型的机械夹抓,从而让码垛机器人具备效率高、质量好、适用范围广、成本低等优势,并能很好地完成码垛工作。夹
发表于 08-15 09:55
LabVIEW 的Tripod 机器人视觉处理和定位研究
为对几何体的识别和抓放过程ꎮ利用边缘提取、滤波去噪、圆心检测等算法采用LabVIEW视觉模块及其库函数进行了图像的预处理、特征提取以及中心点定位ꎮ研究结果表明基于LabVIEW的Tripod机器人
发表于 06-01 06:00
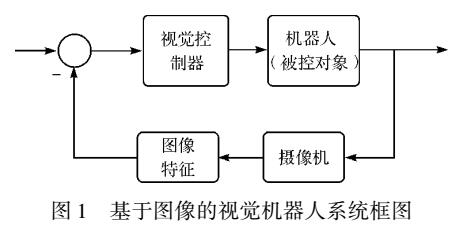
基于图像的机器人视觉伺服系统该怎么设计?
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉
发表于 09-27 08:07
机器人视觉与机器视觉有什么不一样?
的知识,来判定这些零件是不是不良品。某种程度上来说,你可以认为机器视觉是计算机视觉的孩子,因为它使用计算机视觉和图像处理的技术和算法。但是,
发表于 08-28 10:48
深圳机器人上下料视觉定位流程讲解
先拍再抓和先抓再拍的区别 先拍再抓要简单得多,拍照后,视觉给机器人纠偏位置,然后下去吸,这样能保证每次取料位置一致。 放料的时候不用管,只用走一个固定的示教点即可。 先抓再拍则因
发表于 04-07 12:06
四元数数控:工业机器人使用机器视觉系统的原因
和提高工作效率,就必须引入机器视觉技术来实现对目标的识别和定位。目前,装备了机器视觉系统的工业机器人已经被应用于许多领域。在许多自动化的生产
发表于 04-29 09:42
Tripod机器人视觉系统
过程简化为对几何体的识别和抓放过程。利用边缘提取、滤波去噪、同心检测等算法,采用LabVIEW视觉模块及其库函数,进行了图像的预处理、特征提取以及中心点定位。研究结果表明,基于LabVIEW的Tripod机器人
发表于 03-27 14:57
•0次下载
机器人视觉抓件系统抓取零件不到位的原因
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
发表于 03-30 10:47
•571次阅读
大众机器人视觉抓件系统出现抓取零件不到位的问题
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
发表于 04-17 12:29
•404次阅读





 工商网监
工商网监
评论