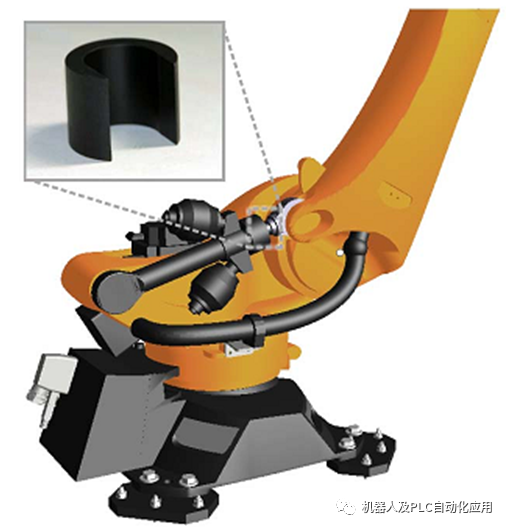
 KUKA C4更换机器人的2轴平衡缸
KUKA C4更换机器人的2轴平衡缸
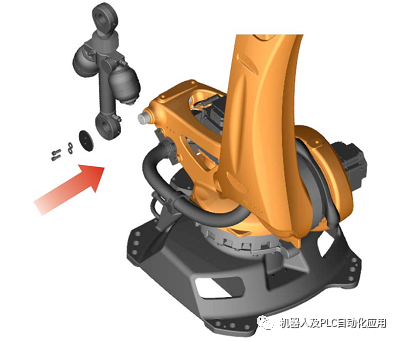
拆卸平衡配重
本节中介绍(在工作压力下)拆卸平衡配重方面的工作。
机器人必须能绕轴 2 运动。
所需辅助工具
间隔块,件号:00-194-012
螺栓固定件,件号:00-190-253
M 16 拔销器,件号:00-131-687
滚动轴承润滑脂 LGEP2(400g 筒装),件号: 00-119-990
挂装设备 (滑轮)
在平衡配重处进行拆卸和安装作业时有挤伤小臂、手和手指的危险。请佩戴劳保手套并防止平衡配重坠落和意外运动。平衡配重约重 40 kg。平衡配重承受着压力。在该系统进行任何作业时均须小心谨慎并具有相应的知识。操作不当时有生命危险。
沿正向移动机器人,使间隔块落位于活塞杆上。

2.将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。


3.将大臂小心地往负向移动,直到间隔块直着固定好。
4.用合适的设备 (如起重机)固定平衡配重。
5.拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。 使用拔销器,将螺栓
从大臂中拔出,然后小心地将大臂沿正向移动。
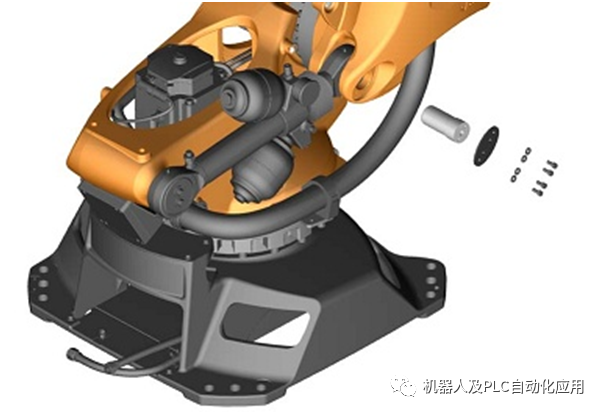
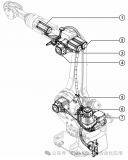
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。
7. 将平衡配重往上抬起。 其间取下止推垫圈和定距环。
8. 将平衡配重放在一块合适的垫子上。

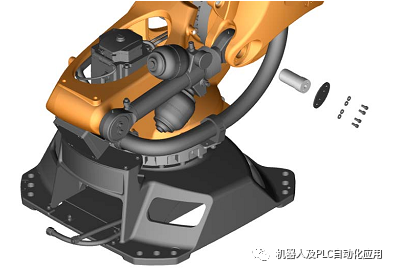
安装平衡配重
操作步骤 1. 用合适的设备固定大臂,然后运送到安装地点。
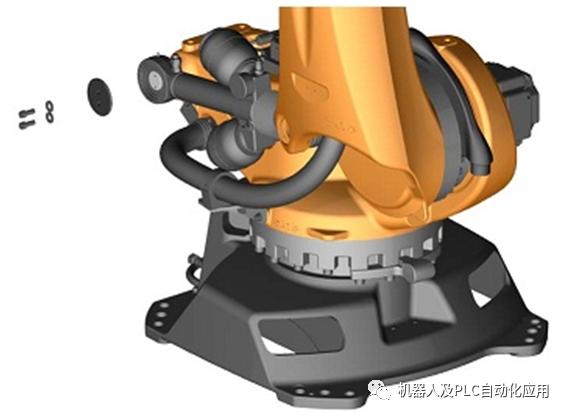
2. 将平衡配重从侧面套到插在旋转机体中的螺栓上并校准。
将平衡配重 (GWA) 安装到旋转机体上
3. 装上盖板,并用两个内六角螺栓 M12 x 30 / 10.9 和碟形垫圈固定。 (转
矩:104 Nm)
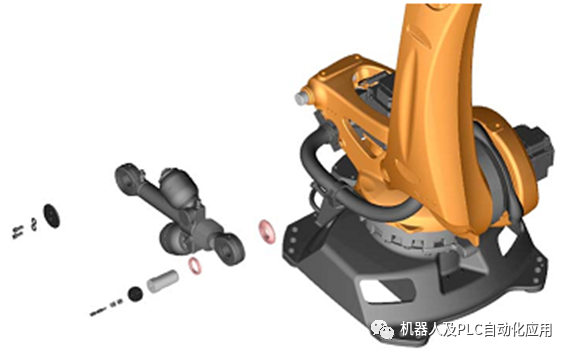
4. 为了将阶梯螺栓插入大臂,钻孔必须对齐。为此:
移动大臂,直到可将平衡配重装入大臂中。
降下平衡配重
将鱼眼接头连同止推垫圈和定距环一起插入大臂并对齐
5. 使用下列特殊工具插入螺栓:用于将螺栓装入大臂的装入工装
6. 套上止动垫圈,并用四个内六角螺栓 M8 x 20 / 10.9 和碟形垫圈固定。(拧紧扭矩 = 31Nm)
7. 沿正向移动大臂,直到间隔套筒可自由活动,随后取下间隔套筒。

8. 检查平衡配重的工作压力。
所使用的专用工具;
GWA 活塞杆夹紧装置

用于将螺栓从大臂中取出的拔出工装


防止轴承卡在 (大臂)螺栓上的专用工装
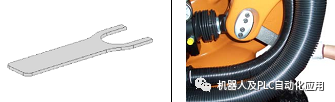
用于将螺栓装入大臂的装入工装

------------------END---------------------
审核编辑 :李倩
-
机器人
+关注
关注
210文章
28086浏览量
205789 -
螺栓
+关注
关注
0文章
63浏览量
9474 -
KUKA
+关注
关注
3文章
217浏览量
16469
原文标题:KUKA C4更换机器人的2轴平衡缸
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Al大模型机器人

基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
六轴焊接机器人的操作流程

【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
开源项目!教你如何复刻自平衡赛车机器人、智能家居中控、竞技机器人先进模糊控制器等
LabVIEW的六轴工业机器人运动控制系统
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
KUKA C4机器人:控制器与机器人之间的数据对比分析

浅析工业交换机与工业机器人之间的通信
更改KUKA C 4 Windows系统的密码

智慧医疗的新翼-双臂14轴协作机器人的崛起与应用
R-2000i机器人更换本体电缆操作步骤






 工商网监
工商网监
评论