 机器人视觉抓取问题分析
机器人视觉抓取问题分析
最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
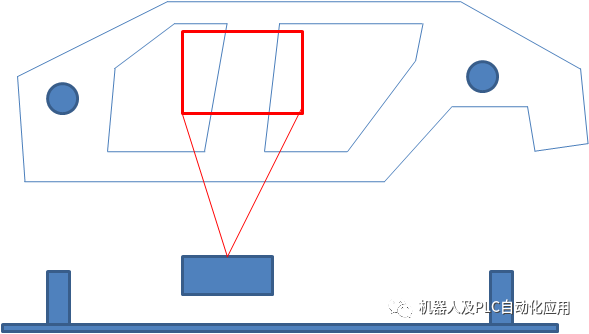
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值.由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值.这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
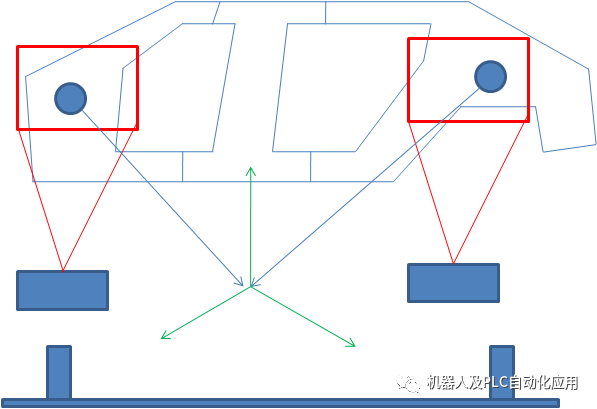
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
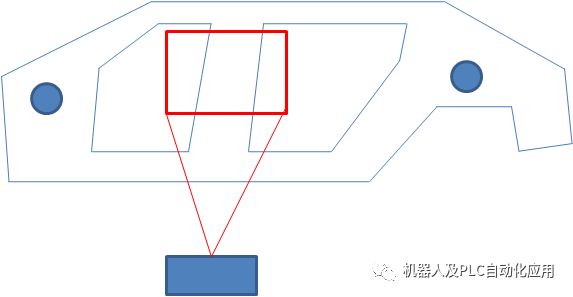
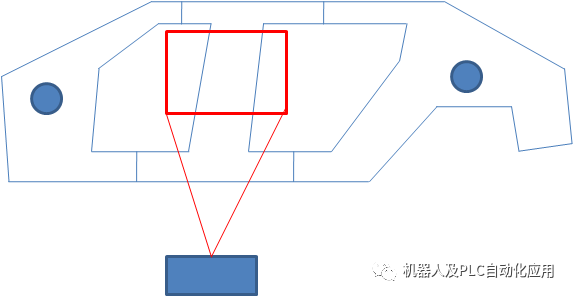
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的.整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法.
--------------------END--------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28512浏览量
207505 -
定位
+关注
关注
5文章
1337浏览量
35414
原文标题:机器人视觉抓取问题分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行提供更加全面的感知
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书还可以为研究人员和工程师提供具体
发表于 12-20 19:17
解锁机器人视觉与人工智能的潜力,从“盲人机器”改造成有视觉能力的机器人(上)
正如人类依赖眼睛和大脑来解读世界,机器人也需要自己的视觉系统来有效运作。没有视觉,机器人就如同蒙上双眼的人类,仅能执行预编程的命令,容易碰撞障碍物,并犯下代价高昂的错误。这正是

智能移动机器人
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场机器人的快速部署,无缝对接产线,配合自研2D/3D

水星Mercury X1轮式人形机器人结合openc算法&STag标记码视觉系统实现精确抓取!
本案例展示了如何利用视觉系统提升机械臂的抓取精度,成功实现了人形机器人的双臂抓取不在局限于单臂抓取。 引言 如今市面上已经有了许多不同类型的
工业机器人视觉技术的应用分为哪几种?
,机器人可以识别和定位物体的位置、形状、颜色等特征。这些信息可以用于机器人的导航、抓取、装配等任务。 1.1 颜色识别 颜色识别是物体识别的一种常见方法。通过分析物体表面的颜色信息,
机器人视觉与计算机视觉的区别与联系
机器人视觉与计算机视觉是两个密切相关但又有所区别的领域。 1. 引言 在当今科技迅猛发展的时代,机器人和计算机视觉技术在各个领域发挥着越来越
机器人视觉的应用范围
机器人视觉是一种将计算机视觉技术应用于机器人领域的技术,它使得机器人能够感知和理解周围环境,实现自主决策和执行任务。随着人工智能、
机器人视觉的结构及工作原理
机器人视觉是一种利用计算机视觉技术实现机器人对环境的感知和理解的技术。它涉及到图像采集、图像处理、特征提取、目标识别、场景理解等多个环节。 机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
。实物图如图2-4 所示。
图 2-4 环形光源实物图
基于伊瑟特的六自由度机器人视觉伺服控制系统如图 2-5 所示。
设计演示
视觉伺服性能分析
发表于 05-29 16:17
富唯智能案例|3D视觉引导机器人抓取鞋垫上下料
随着制造业对自动化、智能化需求的不断提升,如何实现鞋垫上下料的精准、高效操作成为了企业亟待解决的问题。传统的上下料方式往往依赖人工,存在效率低下、精度不足等问题。而富唯智能的3D视觉引导机器人抓取解决方案,则能够有效解决这些问题

视觉机器人焊接的研究现状
视觉机器人焊接技术是将计算机视觉与机器人技术相结合,实现自动焊接过程中的实时检测、跟踪和控制。这一领域的研究一直处于不断发展之中,吸引了众多研究人员和工程师的关注。本文将就

富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
智能机器人还集成了协作机器人、移动机器人和视觉引导技术,具有物料高精度抓取或放置功能,可满足各种复杂场景的协作搬运需求。





 工商网监
工商网监
评论