 水下机器人及仿生传感器现状
水下机器人及仿生传感器现状
作者:郭明博,扬州大学
来源:《流体测量与控制》(2022年第1期)、溪流之海洋人生
前言
传感器性能的优劣直接决定了移动机器人的性能,并起到至关重要的作用。近年来,水下机器人传感技术在海洋工程和海洋资源勘探领域受到了广泛关注。一方面,水下机器人需要感知环境,进行自主导航和避障;另一方面,水下机器人还依赖于传感技术的保障来执行各种实际应用的任务,例如水下目标检测、水下机器人抓取和水下高精度3D测量等。因此,水下机器人传感技术发挥着越来越重要的作用。
在水下环境中,如果能够感知到流速和压力的波动变化的能力,就能够实现实时状态反馈、对其他航行器的跟踪以及对水下有利的动力条件的识别等功能。大多数水下传感技术依赖于声信号(声呐)、光信号、电磁信号和仿生传感器。这些水下传感器的原理及特点概述具体如下:
(1)声呐。声呐是通过测量声波脉冲的传播时间和相位差来对水下物体的位置进行估测。声波脉冲可以在更长的范围内工作,且不会受到水质浊度的影响。虽然水声传感方法具有较大的传感范围,但分辨率较低,限制了水下声呐的实际应用。
(2)光学传感器。光学传感器是通过捕获周围环境的光信号从而获取周围环境的信息,能够提供更高的分辨率。然而,由于复杂的水下光照条件(吸收和散射),光学传感器只能实现短程的传感应用。
(3)电磁传感器。基于电磁信号的传感器可以应用于水下环境,并对距离进行精确测量。然而,水下环境电磁场可能会干扰电磁传感器的测量精度。
(4)仿生传感器。近年来,研究人员对仿生传感技术开展大量研究并获得广泛关注。有研究小组将哺乳动物和昆虫的触须作为陆地机器人传感器设计的灵感,后来将这种灵感扩展到水下传感器的设计应用中。与陆地上通过与物体直接接触所收集信息的触须传感器不同,在液体环境中,移动和静止的物体会产生流动或扰动,这些扰动信号能够被远处的触须传感器检测到。水下生物利用触须进行感知和跟踪的物理机制,可能与其触须的几何特征结构所提供的结构动力学、排列在生物体表面上的触须阵列配置以及每个触须基部的机械感受器的动力学组合有关。
触须传感器相比于其他传感器(包括激光、声呐和红外传感器)具有一定的优势。触须传感器设计相对容易,成本低廉。触须传感器可以通过扫描模式提供距离随时间变化的信息,同时,还可以提供目标物的形状信息。在近距离内,多个触须还可以提供周围环境空间信息。触觉信号对不同的环境条件是不会发生变化的。相比之下,红外或声呐传感器会受到探测对象类型及环境的影响,其反射信号可能会发生变化。因此,触须传感器被广泛用于水下传感等应用。本文将对水下环境中触须传感器的应用研究进行详细阐述。
水下机器人及仿生传感器现状
许多国家对水下机器人进行了长期研究。例如,美国军方设计了“蓝鳍”自主水下航行器,如图1(a)所示,它可以执行自主水下导航和目标检测,并在2014年搜索失踪的马来西亚航空公司MH370客机任务中发挥了重要作用。
俄罗斯设计了“和平1号”和“和平2号”水下机器人,这是世界上唯一一对能够进行水下协同探测的载人潜水器。德国开发了名为“深海C”的水下机器人,它是一种4000m的水下航行器,可以在深海中连续工作60h。法国开发了“VICTOR6000”,如图1(b)所示,这是一种通过电缆操纵的水下机器人,可以获取高质量的水下光学图像。英国开发了全自动“Autosub6000”潜艇,如图1(c)所示,该潜艇安装了电池和传感器,能够独立导航。
日本开发了一种深海水下机器人,名为“Kaiko”ROV,如图1(d)所示,安装有各种水下传感器,该潜水器已经潜水296次。中国也对水下机器人进行了广泛的研究。例如,沈阳自动化研究所开发的“乾隆”和“海斗”水下机器人,如图1(e)、图1(f)所示,这些机器人均配备了声呐、摄像机和灯光装置,已经完成了从海面到海床的不同深度的各种各样水下任务。中国船舶科学研究中心、沈阳自动化研究所开发了“蛟龙”号和“芬多哲”号载人水下潜艇用于深海勘探,如图1(g)、图1(h)所示。此外,哈尔滨工程大学还开发了“橙鲨”和“海岭”等水下机器人,这些水下机器人通过安装各种水下传感器实现对水下环境的探测。中国科学院自动化研究所设计的“仿生海豚”水下机器人可实现在800m深的水下进行连续作业。
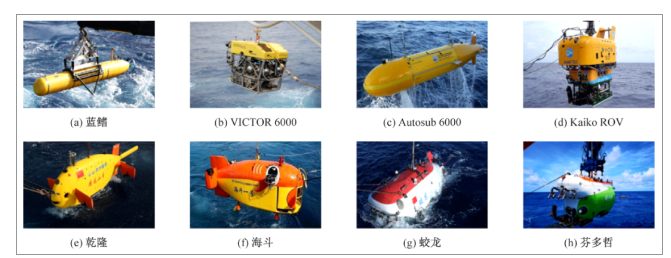
图1 水下机器人
在海洋生物中,海豹可以利用其具有的椭圆形横截面的触须来辨别水流方向。具有椭圆形横截面的胡须,以及位于海豹底部的面颊神经作为传感元件的触须,当水流来自不同方向时,其触须将具有不同的特征尺寸,从而导致了触须上阻力的不同。由于触须内不存在神经,阻力将这些应力信息传递到触须底部的脸颊上,并为海豹产生感应信号。受此启发,使用韧性树脂通过立体光刻技术制造的高纵横比椭圆柱,用于承受水下扰动产生的压力梯度信息,模拟实现了海豹触须与水流相互作用的新型仿生传感器,该仿生传感器被用于港口来获取水下扰动的信息。该仿生传感器的结构示意图如图2所示,由传感膜片和叉指电极所构成,用于承受从支柱转移的应力并产生信号,类似于海豹胡须底部脸颊的神经。
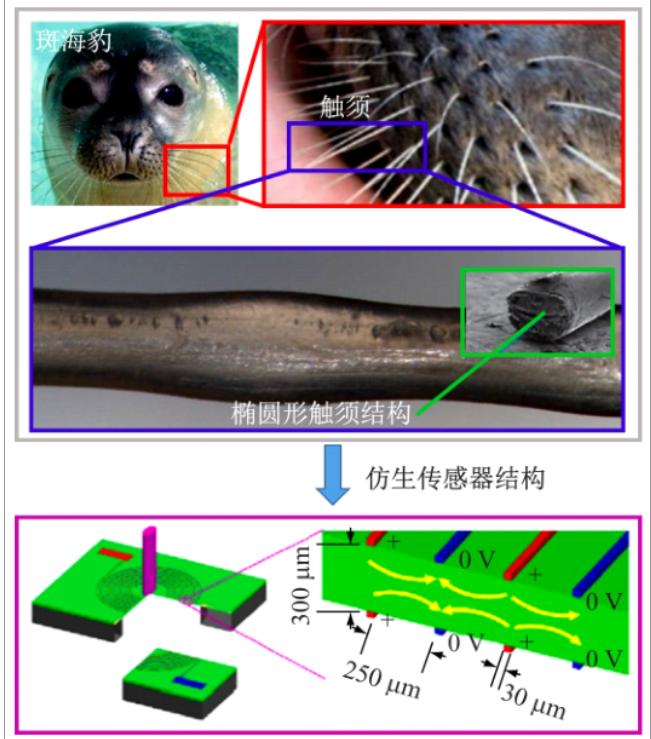
图2 传感器结构
触须与物体接触的示意图如图3所示。图中,触须传感器枢轴点到接触点之间的距离为径向距离,θ0表示延伸角,λ是位置h处传感器测量的偏转角,传感器θ1处的切向角为θ1=θ0-λ。
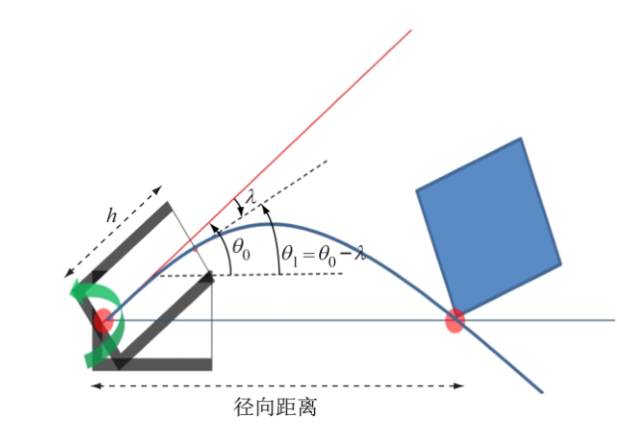
图3 主动触须传感器系统
假设在触须上有一个与目标物体的单点接触,由于触须具有弯曲刚度,如果目标对象是圆形的,那么触须上的接触点在扰动过程中将发生移动,其与基座的接触距离也将发生改变,从而获得目标对象的形状信息。如果目标对象有一个锐角,那么当触须在目标对象的表面上发生滑动时,接触距离将会保持不变。假设一个触须可以对一个点接触的距离进行估测,那么一组触须就可以收集目标对象或周围环境的更多信息。多个触须有助于对目标物体的距离及形状进行检测和识别。
水下传感器应用现状
1、水声传感器
水声测距/成像传感器主要包括单波束声呐、侧扫声呐和多波束声呐。单波束声呐通过接收传感器所发出的短脉冲声信号波束,并根据行程时间对淹没物体的深度进行测量。侧扫声呐由控制单元、拖曳体、电缆和记录器等子模块组成,旨在详细对地形、地质及矿物信息进行测量,并可以执行对目标的搜索和跟踪。
多波束声呐是多个单波束声呐的组合,可通过行程时间获得水下目标的高精度方向和深度值信息。水声定位传感器可以对被测物体(水下机器人)的位置进行测量。由于声呐可以对中远程水声图像的数据进行获取,因此,声呐被广泛用于水下目标的检测和跟踪。基于声呐的目标检测和跟踪是通过对采集数据的精确处理实现的,这种方法耗时且影响声呐传感器的性能。
2、水下电磁感应传感器
水下电场传感可使机器人在复杂的水下环境中进行通信,并有效避免声学多径效应。在南美洲电鳗和非洲管鱼的启发下,研究人员开发了一种基于仿生电场的通信系统,可以在复杂的水下环境中进行有效通信。水下磁感应具有隐蔽性高、探测性能强、定位精度高等优点,因此,基于磁感应的水下传感器可以在复杂的水下环境条件下工作。例如,美国和加拿大海军在白令海峡周围的冰山上部署了电磁感应电极,并与卫星定位系统配合,成功探测到苏联的“特雷萨拉”核潜艇。
3、水下仿生传感器
为了提高水下机器人的感知能力,基于仿生原理的触须传感器被研究人员开发并应用。侧线是鱼的一个感应器官,可以感知周围水流的变化,从而帮助鱼在黑暗条件下感知周围的环境。受此启发,人工侧线传感器被开发并应用于对实际环境的感知。触须是水下生物的重要感知器官,被用于识别、定位和跟踪猎物。受海豹触须的启发,研究人员开发了许多人造触须传感器,并在水下设备中获得应用。
在海洋结构物中,围绕圆柱形立管的支腿由于会引起结构的振动,给海洋工程带来了工程难题。通过对海豹的触须进行研究,将振动和仿生设计相结合,揭示圆柱形结构物周围流体流动的基本物理原理(海豹的触须如何使它们能够感知环境),设计出了水下流量传感器。安装在自主水下航行器(AUV)上的这种传感器可以有效地提高航行器的导航能力。
仿生流量传感器及其应用
受海洋生物触须的启发,近年来研究人员设计并制造了多种具有触须状结构的流量传感器。仿生流量传感器通常由高纵横比圆柱结构(受触须启发)和传感基座(受神经触须毛囊启发)所组成。当触须结构遇到稳定或动态的流动刺激时,它会偏转并在传感底座中产生高弯曲应力,该应力被转换为与流动刺激成比例的可测量的电信号。将传感基座处的机械形变转换为电信号输出的传感原理可以是电阻式(例如使用应变计)、压阻式(例如使用石墨烯作为传感材料)、电容式、压电式或光电式。仿生触须传感器可降低产生的噪声,提高高雷诺系数下流量传感器的信噪比。
与水下生物相比,目前的人工水下传感器在检测精度、距离、灵敏度等技术指标上还存在较大差距,而且在传感器的功耗和体积上也有很多方面需要改善。如何将各种环境信息转化为电信号,从而得到周围环境的信息并进行自主处理是水下传感器的核心,也是未来触须传感器在水下航行器、水下结构物监测中获得广泛应用的关键。通过增强现有仿生传感器的信息转换能力,开发新型触须传感器材料,多类型触须传感器融合,将会是触须传感器在水下获得应用的必经之路和挑战。
结语
基于仿生学的触须传感器在水下应用具有重要的研究意义。触须传感器通过感知环境扰动信号对水下环境实现了监测。本文通过对不同的水下传感器原理及应用进行介绍,对比了不同类型水下传感器的各自特点。对仿生学传感器的设计理念进行了简述,并给出触须传感器的设计原理和思路,总结出触须状传感器对流体激发信号的机械传递机制以及触须机械结构在传感过程中的工作原理。最后,对基于触须传感器原理的水下流量传感器及其在水下环境中的应用现状和面对的挑战进行重点概述,展望了触须传感器在水下环境中未来的发展策略。
-
传感器
+关注
关注
2551文章
51134浏览量
753842 -
机器人
+关注
关注
211文章
28445浏览量
207205 -
电磁感应
+关注
关注
17文章
829浏览量
58056
发布评论请先 登录
相关推荐
水下机器人便携式遥控单元设计
各种炫酷的仿生机器人
【NanoPi NEO2试用申请】水下机器人探测项目
TDK-Lambda电源在系留无人机及水下机器人中的应用
如何设计水下机器人嵌入式控制系统?
水下机器人制作需要实现哪些功能呢
采用NI MyRIO实现的水下机器人(Zynq
水下机器人研发挑战海外市场
自由度下的水下机器人控制器抗干扰设计

水下机器人发展现状,虚假繁荣还是水下机器人元年

水下机器人的设计与实现





 工商网监
工商网监
评论