 ADAS和自动驾驶中FMCW雷达基础知识
ADAS和自动驾驶中FMCW雷达基础知识
1.1 什么是雷达?
雷达(Radio Detection and Ranging 的首字母缩写词)使用无线电波来检测环境中的物体。它允许确定距离(称为范围)、角位置(方位)和速度。雷达技术是在二战期间为军事用途而开发的,但现在有许多民用应用,包括空中或海上交通管制、天文学、海洋和气象监测、测高、地质观测和汽车应用。
雷达系统包括一个发射器,它向某个方向发射电磁射频波(雷达信号)。然后由雷达接收器检测从目标物体反射的信号(回波)。反射的幅度由物体的材料属性、大小和形状(雷达横截面 RCS)决定。通过处理这个反射信号,可以确定目标的特性。
1.2 FMCW雷达
汽车雷达系统使用所谓的调频连续波 (FMCW) 运行。该系统以特定频率发射连续波,然后在一段时间 T 内对其进行调制。这为发射的信号提供了“时间戳”。信号随后传播到目标,其中一部分被反射回来。雷达将检测反射信号并将其与原始信号进行比较,将它们混合并处理结果信号。简化示意图如图 1 所示。
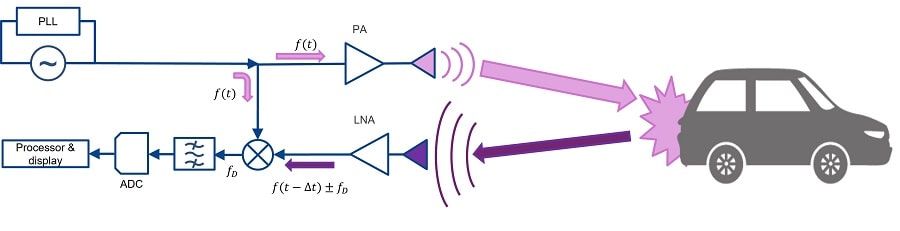
图 1:FMCW 汽车雷达——原理和构建模块
图 2 和图 3 显示了这种雷达信号的一个示例。返回的信号在形状上与发送的信号相似,但随着从雷达到目标的双向行程花费时间 Δt,时间上发生了偏移与到目标 R 的距离成正比:
图像

其中 c 为光速。
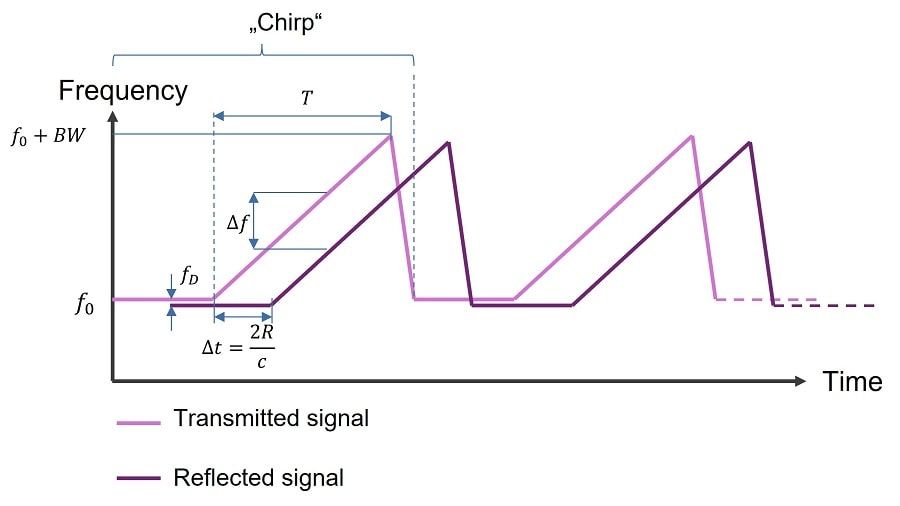
图 2:锯齿波 FMCW 雷达信号:频率与时间。
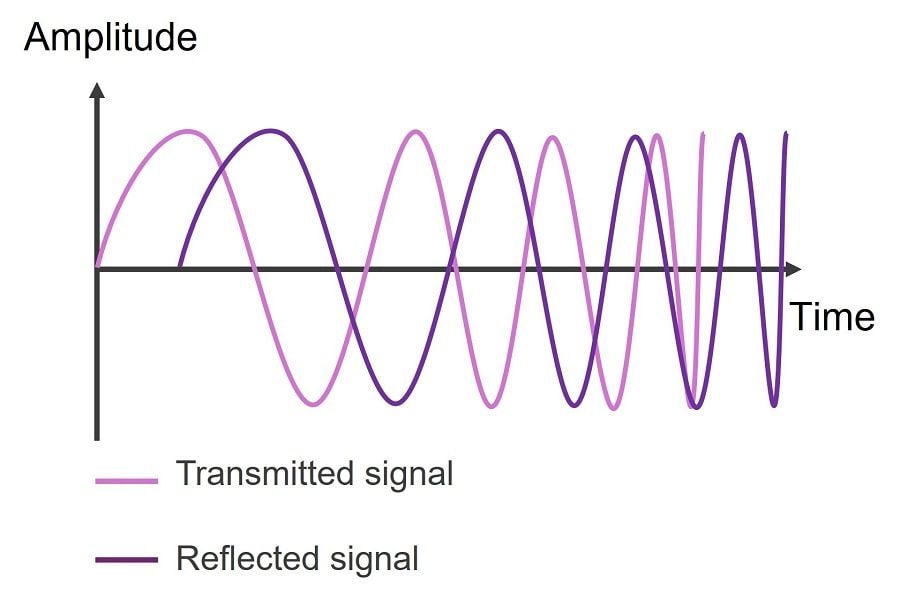
图 3:FMCW 雷达信号:幅度与时间。
通过在任何给定时刻将反射波与原始信号进行比较,可以观察到频移 Δf。这种偏移允许确定信号或“啁啾”的每个周期的范围 R。如果在几个啁啾上监测信号,由于多普勒效应,将检测到一个额外的频移 fD 用于移动接近或远离雷达的目标。这允许确定目标的速度。最后,如果考虑不同的信道,使用空间分布的天线,可以建立信号的到达方向,从而获得目标的2D或3D位置。
这意味着,要进行 4D 检测(距离、方位角和仰角方向以及速度),需要对信号进行时空处理。为此,需要将信号数字化并保存以供进一步处理。第一步将是创建所谓的“雷达立方体”。
1.3 雷达处理——雷达立方体
雷达数据立方体是对存储的雷达数据进行时空处理的三维图形描述。它总结了获取距离、速度和方位信息所需的三个基本步骤。
如上所述,接收到的信号被采样处理。第一步是执行 FFT(快速傅里叶变换),使每个样本对应一个“bin”,以获得所谓的“快速时间”上的范围信息。这在图 4 中进行了说明。对形成帧的每个啁啾重复该过程。
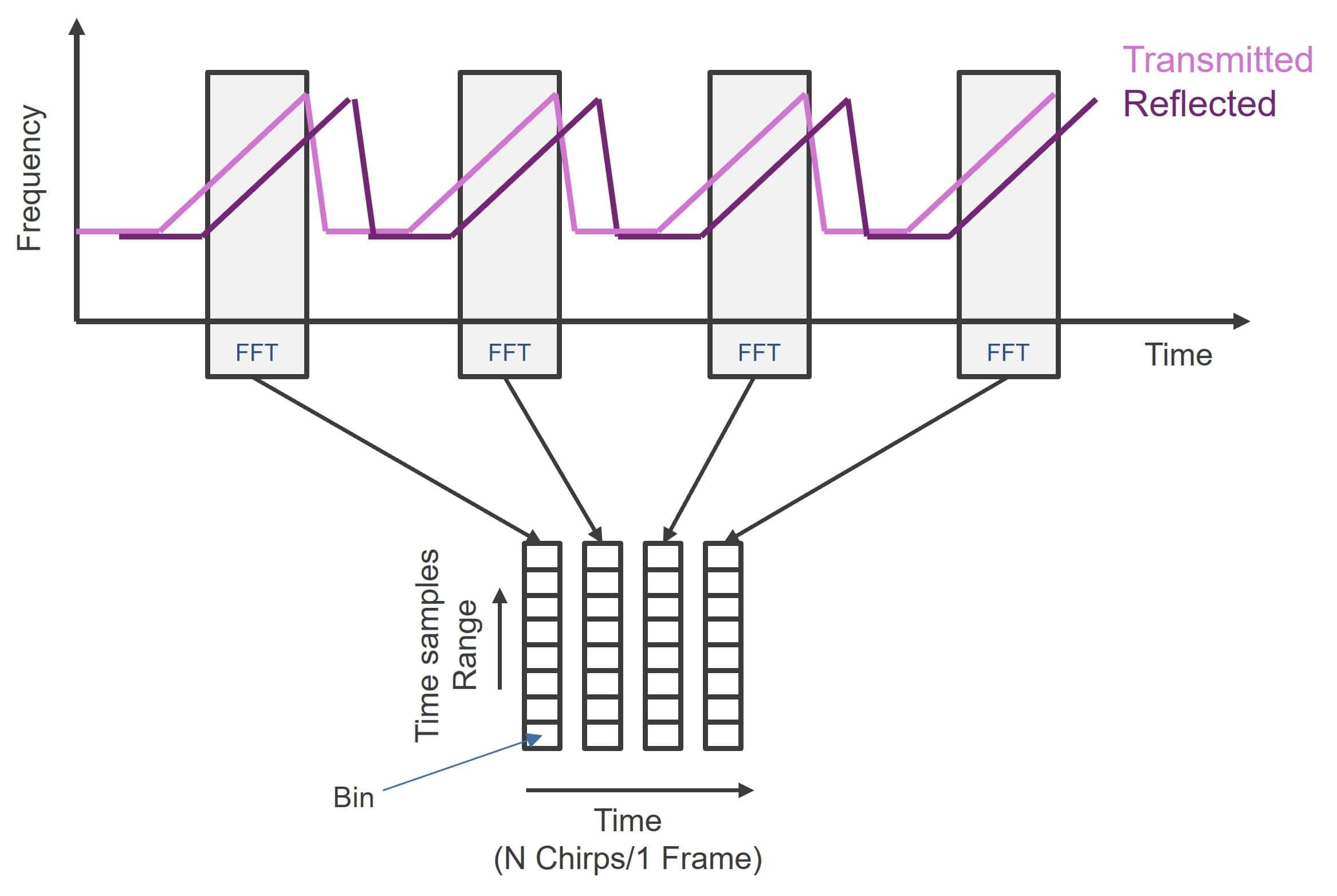
图 4:雷达处理:距离 FFT。
一旦帧中的所有芯片都被采集、保存和处理,就会执行多普勒-FFT 以获得有关目标速度的信息。该评估每帧进行一次,即每N个啁啾。因此,它也被称为“慢时间”。最后,结合所有可用通道的空间数据,得到雷达立方体的第三维,其中包含目标空间位置的信息。雷达立方体的图形表示如图 5 所示。
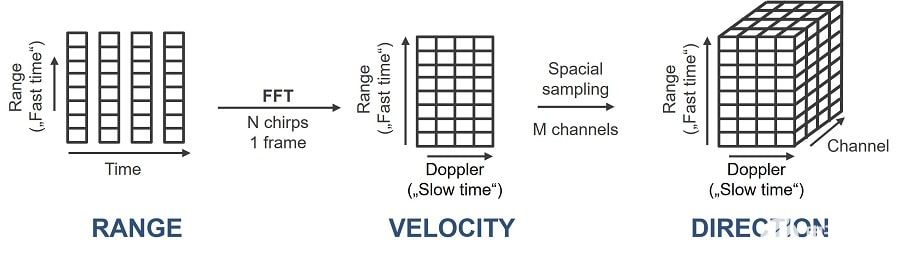
图 5:雷达立方体。
1.4 汽车雷达模块
半导体技术的进步促进了汽车雷达的部署,尤其是基于硅的技术。虽然在 2010 年代初期,多通道雷达收发器集成在单个 GaAs(砷化镓)MMIC(单片微波集成电路)上,但如今硅锗 (SiGe) 的使用提高了集成密度并降低了大规模生产的成本。下一个挑战将是向 CMOS(互补金属氧化物半导体)的过渡,这将允许在芯片上集成更多数字电路,同时保持良好的射频性能。
然而,要实现雷达系统,每个雷达模块必须包括一个或多个 MMIC 收发器,这些收发器发射雷达信号,检测障碍物的回波,并执行一些信号调理和数字化,以准备原始雷达数据,以供处理程序进一步分析单元。后者可以是用于基本处理的微控制器单元 (MCU),但随着雷达技术的进步,SoC(片上系统)越来越多地用于实现更复杂的目标分析、检测和跟踪。
图 6 说明了在整个接收路径上处理雷达信号的不同步骤。虽然模拟射频处理和数字信号转换总是在 MMIC 上执行,但信号分析的接口不是固定的。随着雷达架构和信号处理越来越复杂,一些步骤(例如第一个 FFT)已经可以在 MMIC 上执行。此外,还可以将雷达收发器和处理单元组合在一个单片芯片中,用于角雷达等某些应用。
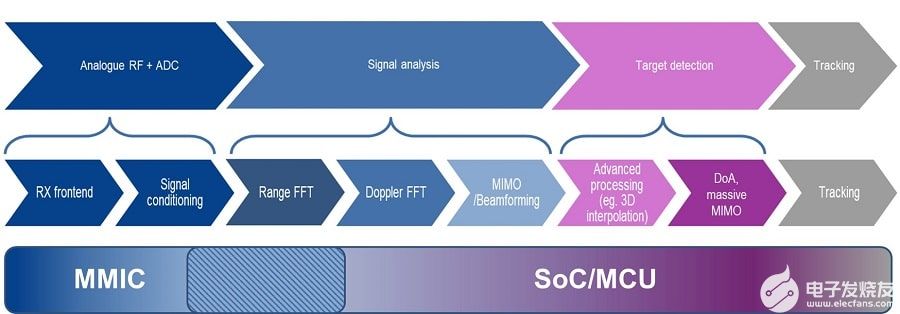
图 6:雷达处理步骤。
未来,可以实现更复杂的架构,在汽车周围分布多个卫星雷达。然后,雷达模块将在将数据(例如距离和点云)传送到中央控制单元(ECU)之前仅执行有限数量的预处理,然后中央控制单元(ECU)可以应用更先进的处理和数据融合,而不仅仅是卫星雷达模块以及其他传感器。
1.5 结论
本条目概述了用于汽车应用的 FMCW 雷达的工作原理,及其使用 MMIC 和 MCU/SoC 的实现。
审核编辑:郭婷
-
汽车电子
+关注
关注
3023文章
7835浏览量
166050 -
雷达
+关注
关注
50文章
2884浏览量
117187 -
FMCW
+关注
关注
9文章
88浏览量
23425
发布评论请先 登录
相关推荐











 工商网监
工商网监
评论