 RT-Thread 4.1.0中POSIX渊源介绍
RT-Thread 4.1.0中POSIX渊源介绍

1. POSIX 渊源
可移植操作系统接口,POSIX 标准定义了操作系统(很多时候针对的是类 Unix 操作系统)应该为应用程序提供的接口标准,从而保证了应用程序在源码层次的可移植性,如今主流的 Linux 系统都做到了兼容 POSIX 标准。由此可见,可移植性是 POSIX 的一大特性,如果一个操作系统拟合了POSIX系统,就将可以将自己的 POSIX 应用轻松迁移到其他同样符合POSIX标准的系统平台,并且可以获得大量的 POSIX 应用,丰富自己系统的应用生态。
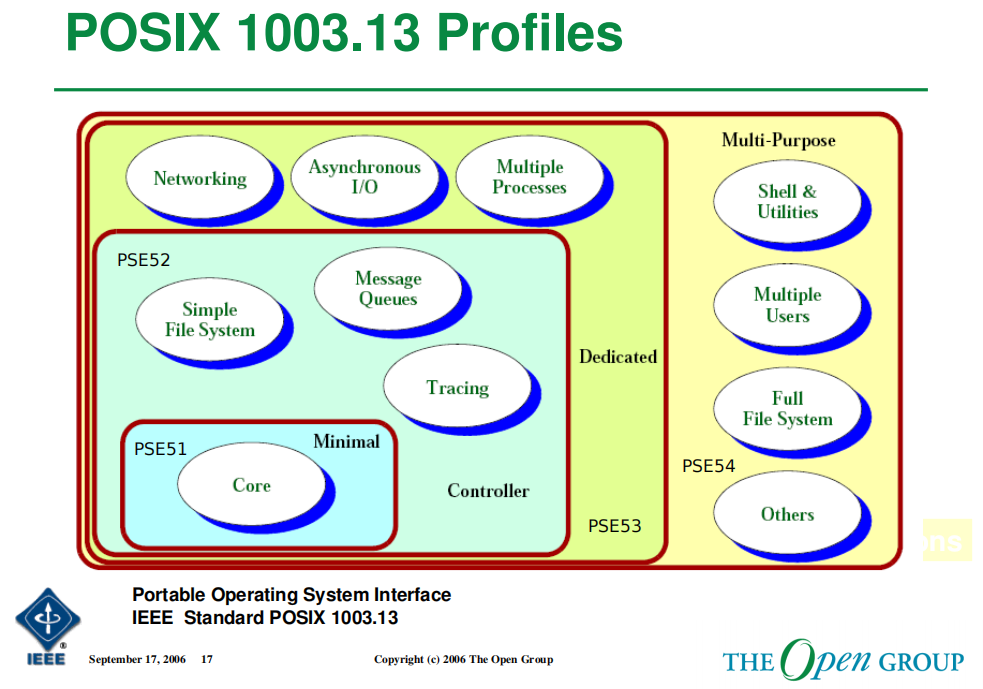
POSIX为了提供不同层级的RTOS能力,划定了PSE51,PSE52,PSE53,PSE54共四个级别;分别对应了四种操作系统。
1、Minimal Real-time System Profile IEEE Std 1003.13 PSE51,基础 RTOS
2、Real-time Controller Profile IEEE Std 1003.13 PSE52,带有简单的文件系统…等
3、Dedicated Real-time Profile IEEE Std 1003.13 PSE53,拥有网络功能…等
4、Multi-Purpose Real-time Profile IEEE Std 1003.13 PSE54,完整的文件系统,带有 Shell 组件…等
由于标准的制定是随着时间发展而不断更新的,PSE51, 52, 53, 54 的标准也随着 MCU,MPU 芯片产业的发展,不断增强的芯片功能和性能使得这些标准所对应的四种操作系统的界限而越显模糊。在 RT-Thread 中也依靠自身的组件内容,提供了多种标准的部分内容,为不同的 POSIX 应用提供可供在 RTOS 系统上使用的软件。
2. POSIX 在 RT-Thread 中支持情况
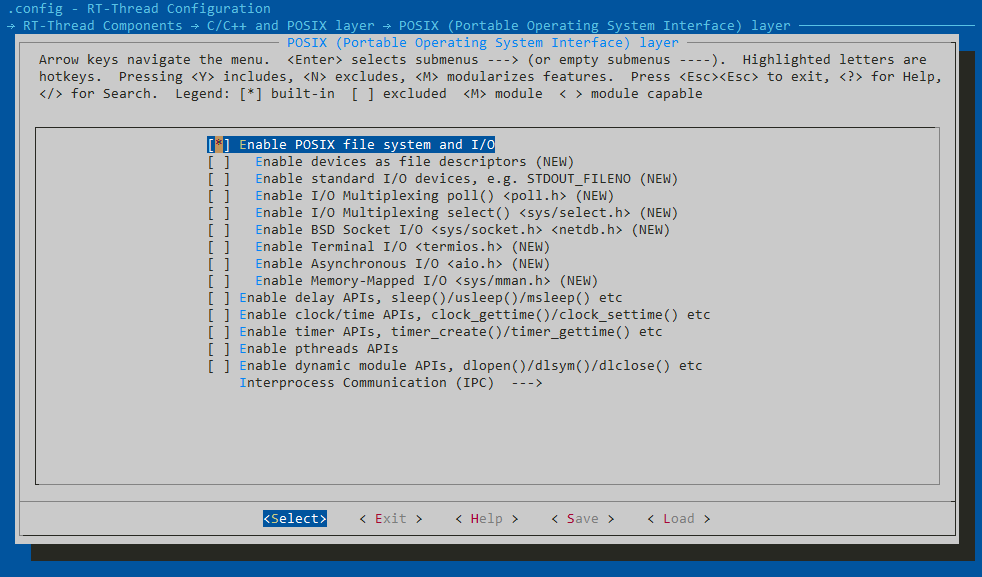
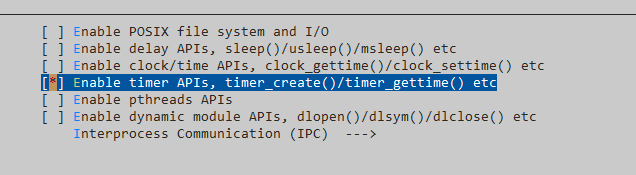
RT-Thread 针对 PSE51 的标准规定的头文件及对应接口,提供了大部分接口。除此之外,我们还提供了更加完整的文件系统的接口,以及基于我们 SAL 组件的网络接口。这为 POSIX 的应用迁移打下了基础,可以使得较复杂的 POSIX 应用也可以经过小部分修改就可以在 RT-Thread 上运行。
-
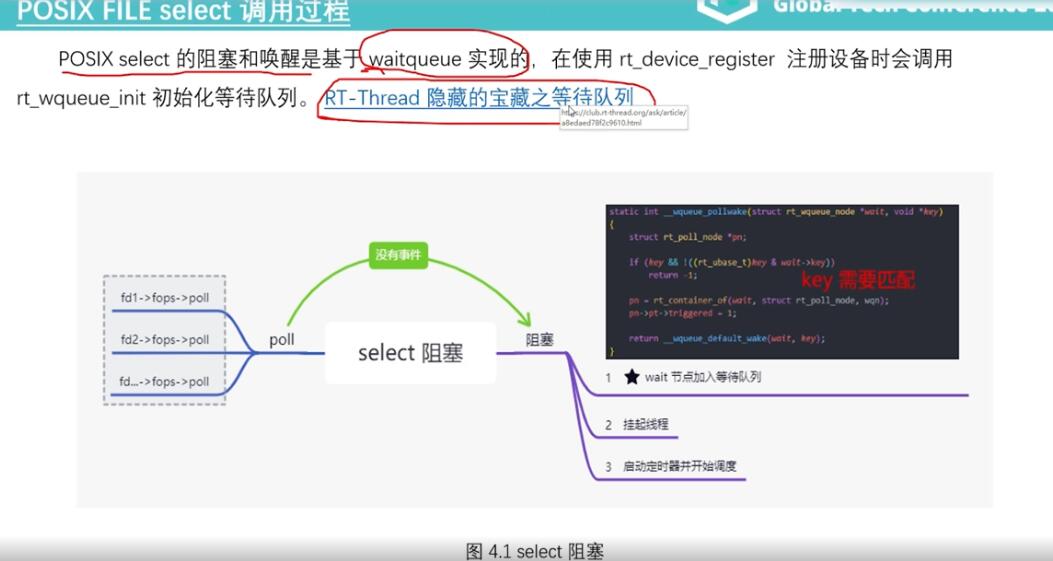
POSIX FILE 相关接口,包含了文件系统的内容,接口比较丰富;标准 I/O 接口,Poll / Select 等较复杂的功能也已经支持
-
Delay 相关接口
-
Clock 相关接口,对拥有 RTC 硬件,或者没有使用 RTC 硬件的设备都有对应的功能实现
-
Timer 相关接口,已经对接到 RT-Thread 的定时器接口,实现对应的函数
-
Dynamic 动态模块
-
POSIX 的 标准 IPC 接口 :pipe ,message,semaphore 等函数
通过上面灵活的配置项,开发者可以启用对应的功能来添加该类函数的支持;这对与同样使用功能宏来标识一些函数功能的 POSIX 接口来说十分类似,在该界面可以配置对应的 POSIX 函数支持。
3. POSIX 的实现简介
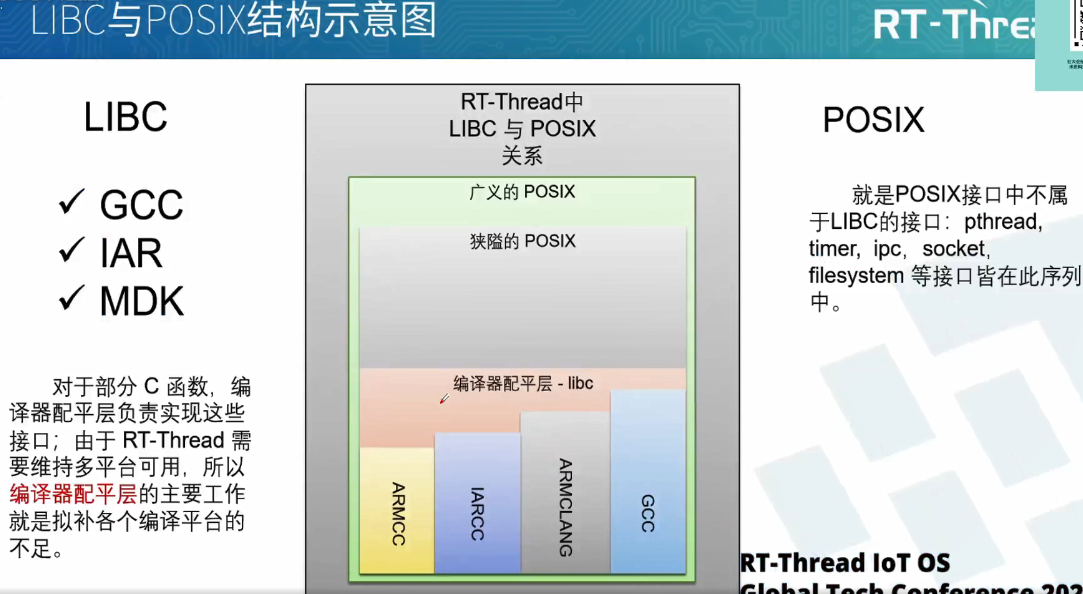
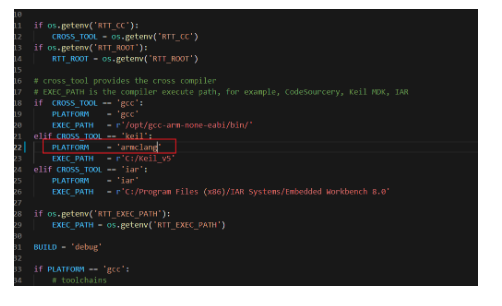
由于 RT-Thread 作为一个可以兼容多种开发方式的操作系统,针对 ARMCC,ARMCLANG,IARCC,GCC 现阶段占比比较多的开发工具链都做了对应的适配。所以,简单描述一下RT-Thread 在做适配时,针对不同的编译平台所做得操作,以及对应的关系图。
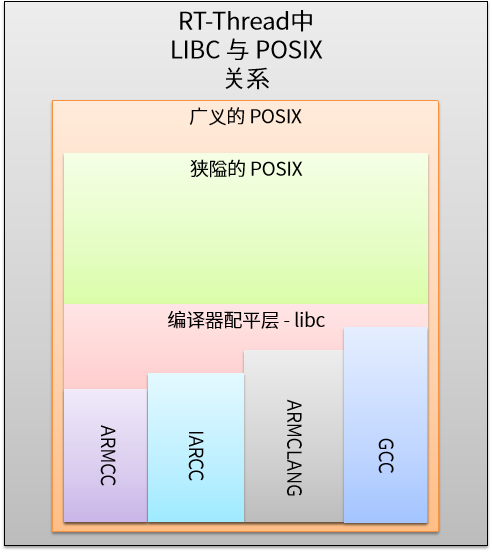
由于在不同的平台开发所使用的编译工具链不一致;所以在实现时,RT-Thread 区分了三个概念:广义的 POSIX,狭隘的 POSIX,编译器配平层;下面结合关系图,描述一下对应的概念:
-
广义的 POSIX ,即 POSIX 接口;这里面包含了一些关于 pthread, signal, IPC 等函数以及 C 库的相关内容;
-
狭隘的 POSIX,即不是 C 库标准提供以外的 POSIX 函数,例如 pthread 这些内容;
-
编译器配平层,由 C 库相关提供的函数。由于不同编译平台对该内容的实现参差不齐,因此需要针对不同的编译平台增补这些函数。这也就是 “ 配平 ” 的由来。这块内容较多,且不同的编译工具链所支持的操作不一,因此在 POSIX 代码迁移时需要修改这里来解决对应的编译错误。
4. POSIX 在 RT-Thread 中使用方法
4.1 Pthread 接口
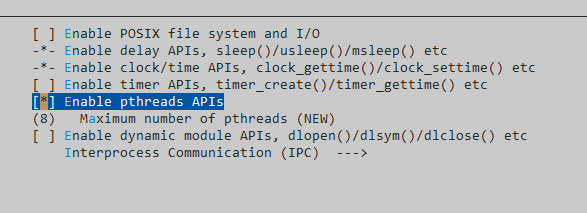
1、在 menuconfig 中打开 pthread ,设定支持得最大 pthread 数目
2、在用户代码中,即可使用 pthread.h, sche.h 这些 pthread 提供的头文件来编程
1#include
4.2 Timer 接口
1、在 menuconfig 中打开 timer 即可
2、在用户代码中,即可使用 这些 timer 提供的头文件来编程
1#include
4.3 Net 接口
1、在 menuconfig 中打开 Enable BSD Socket I/O 就可以使用标准 Socket 进行编程
4.4 Filesystem 接口
1、在 menuconfig 中打开Enable POSIX file system and I/O 配置具体的 POSIX 函数接口
2、按照需求打开需要的功能,例如 设备I/O,AIO,MMAN 之类的功能
4.5 其他接口
其他接口也是一样,开打对应的 menuconfig 选项,即可使用对应头文件,及提供的函数来编程。整个过程不需要 rt-thread 的头文件参与,使编译出的代码运行在 RT-Thread 操作系统之上。
5. 注意事项
5.1 不同编译平台的兼容
在上一节,编译器配平层的存在解决了多组编译工具链不一致造成的问题;同时,也引入了一些在编写代码时需要注意的事项。这些注意事项是为了解决对应的编译错误。因为编译工具链有的允许头文件替换,有的不支持这些问题。RT-Thread 提供了一个相对轻便的解决办法:
为保证跨不同编译器、不同工具链的兼容性,建议用户应用层代码:
-
使用
代替 -
使用
代替 -
使用
代替
有使用
5.2 Net 接口
启用网络功能后,并不是所有的 BSD Socket 接口都支持,在 RT-Thread 中只实现了一部分函数。因此如果对应函数缺失,需要按照代码逻辑替换为基础的 Socket 接口来兼容原逻辑。完整的 BSD Socket 功能将持续优化以解决这个问题。
-
操作系统
+关注
关注
37文章
7452浏览量
129703 -
Posix
+关注
关注
0文章
36浏览量
10136 -
RT-Thread
+关注
关注
32文章
1655浏览量
45414
原文标题:RT-Thread 4.1.0 特性解析之LIBC与POSIX
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
在RT-Thread中使用POSIX Threads接口
RT-Thread Smart已正式上线
RT-Thread v4.1.0版本正式发布
RT-Thread V4.1.0新特性CMake介绍与构建CMake工程
RT-Thread 4.1.0的CMake构建教程
RT-Thread全球技术大会:Kconfig在RT-Thread中的工作机制
RT-Thread大会:RT-Thread对POSIX的实现
RT-Thread全球技术大会:RT-Thread对POSIX的实现情况介绍
RT-Thread全球技术大会:POSIX FILE select的调用过程
RT-Thread 4.1.0正式添加对Arm Compiler 6支持




评论