 点云数据的方位角归一化方法
点云数据的方位角归一化方法
摘要:点云感知算法是安全鲁棒的自动驾驶系统中尤为重要的一环。在CVPR 2022上,地平线-华中科技大学计算机视觉联合实验室发表了研究成果Azimuth Normalization——以点云特有的径向对称性作为先验,对数据归一化,降低从点云中获取信息的难度。该归一化方法能与大多数感知算法结合,降低对训练数据的需求并提升性能上限,在三维场景感知中有着广泛的应用价值。
简介
从机器学习的角度考虑,数据中隐含的对称性能够作为算法的归纳偏置(inductive bias),对于提升算法精度有很大的帮助。点云是三维场景理解中最重要的表示形式,本工作讨论了点云数据特有的径向对称性(Radial Symmetry),并提出了针对点云数据的方位角归一化方法(Azimuth Normalization / AziNorm)。Azimuth Normalization采用了一种分而治之(Divide-and-conquer)的策略,灵活地分解全场景点云并在子点云上进行归一化。归一化后的子点云具有更简单的模式(pattern),更容易被下游的感知算法识别。Azimuth Normalization具有很强的拓展性,能够应用在多种传感器产生的点云数据上(如LiDAR、RADAR、RGB-D camera),能够与各类感知算法(如检测、分割)结合并且不需要改变具体算法的实现细节和超参数。Azimuth Normalization能够显著提升感知算法的数据效率(Data Efficiency),收敛速度和性能上限,如图1所示,AziNorm与SECOND [1] 检测算法结合提升明显,仅用10%的数据量或迭代次数就优于充分训练的SECOND。
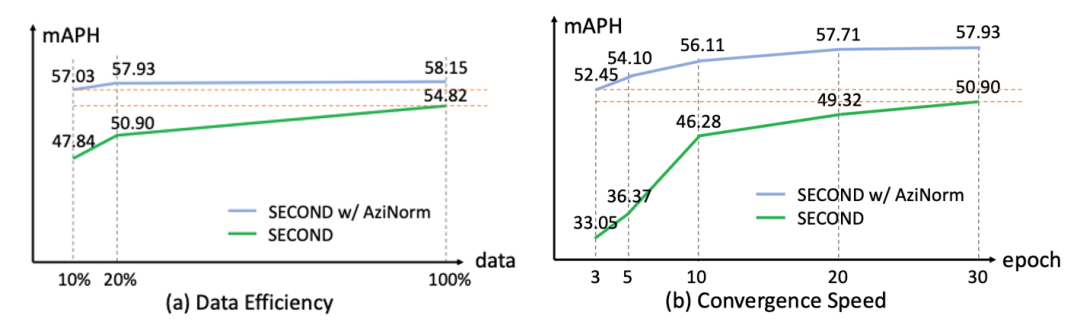
图1 数据效率、收敛速度和性能上限
径向对称性
径向对称性与产生点云数据的传感器(LiDAR / RADAR /RGB-D camera)的工作原理高度相关。以LiDAR为例,如图2,LiDAR始终沿着径向(法向)方向向各个方位角发射电磁波,电磁波触碰到障碍物表面后反射,沿着径向方向反射的回波最终被LiDAR接收,形成点云。因此,产生的点云在径向方向上具有明显的对称性(如图2中,地面的点云对称性明显)。

图2 径向对称性(Radial Symmetry)
算法流程
Azimuth Normalization采用了分治的策略,具体流程如下(流程图见图3):
Patch Splitting:把整个感知范围拆分为相互重叠的块(patch), 把全场景的点云规则地分解为子点云;
Patch Filtering:滤除不包含点云的patch、只含地面点的patch(点云具有稀疏性、不均匀性),避免不必要的计算开销;
Normalization:对子点云进行平移变换、旋转变换(对每个点的3D坐标进行),统一各个patch的径向方向;
Patch-wise Perception:在patch level调用现成的感知算法(point-based、voxel-based、hybrid),不需要改变实现细节和超参数;
Inverse Normalization:把感知结果逆变换回原本的LiDAR坐标系;
Patch Merging:融合各个patch结果,对于不同的感知任务可以采用不同的融合策略,例如,对于检测采用非极大值抑制(NMS),对于分割采用逐点平均。
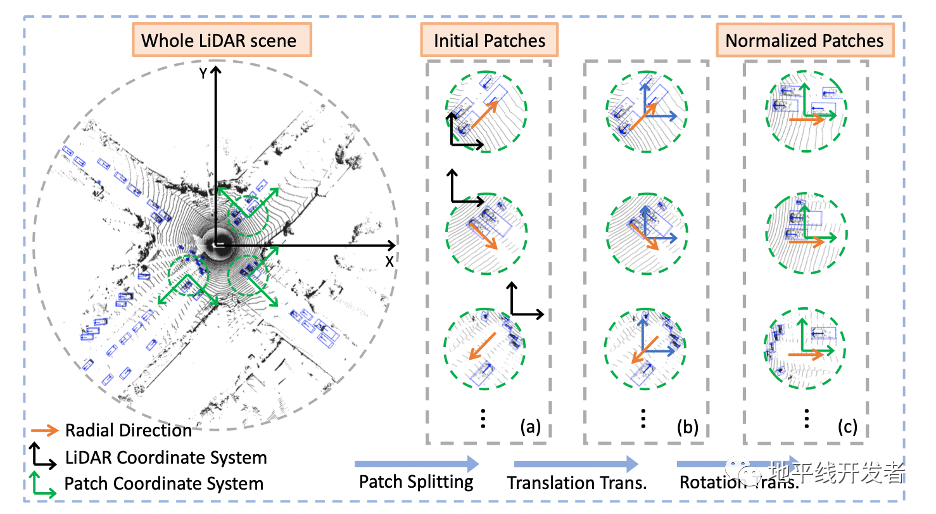
图3 算法流程
实验结果
1. 点云检测和点云分割表1和表2是Azimuth Normalization在点云检测和分割两个感知任务上的实验结果。值得注意的是,对于检测难度大的类别(点稀疏、训练样本数量少),如pedestrian和cyclist,Azimuth Normalization能够带来更明显的增益。Azimuth Normalization极大地简化点云数据中的模式(pattern),消除方位角带来的差异,在归一化后,难类别检测难度显著降低。
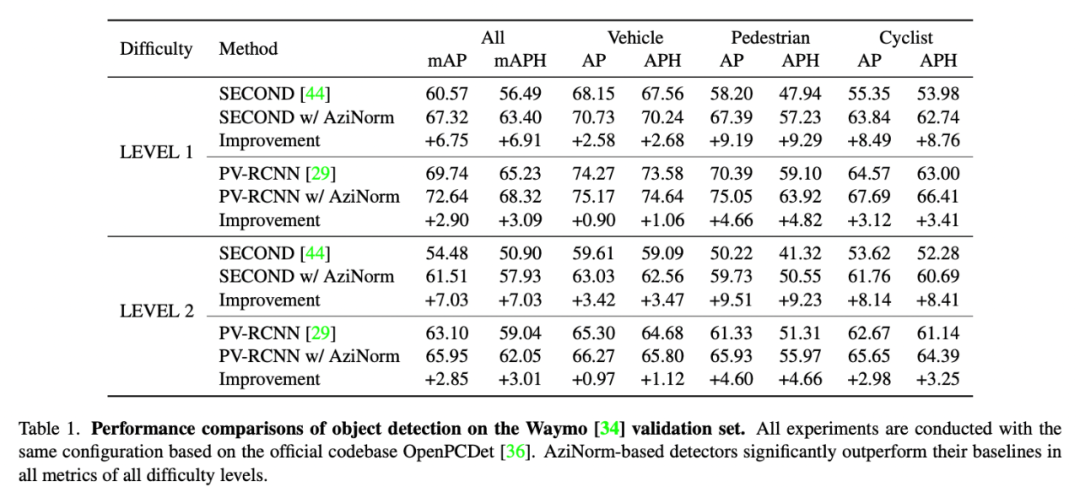
表1 点云检测算法SECOND [1] 和PV-RCNN [2] 在Waymo val set上的实验结果
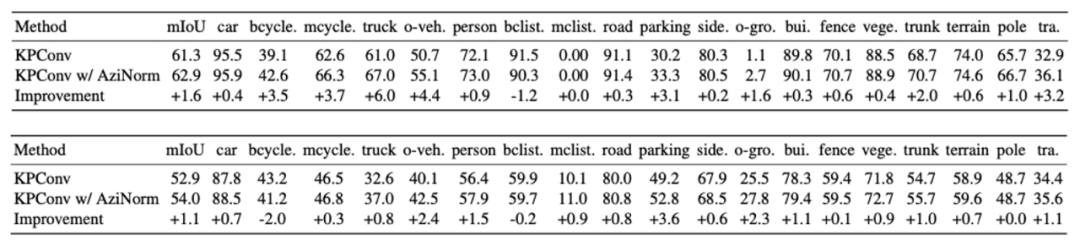
表2 点云分割算法KPConv [3] 在SemanticKitti val set和test set上的实验结果
2. 归一化粒度(Normalization Granularity)图4展示了另一种分治策略,被称之为扇形区域归一化(Sectorial Normalization)。点云被均匀划分为扇形区域,并通过旋转统一径向方向。表3对比了Sectorial Normalization和Azimuth Normalization。4- 和8- Sectorial Normalization 把方位角的变化范围分别缩小到了90º和45º,而Azimuth Normalization的归一化粒度更小,因此性能提升更明显。
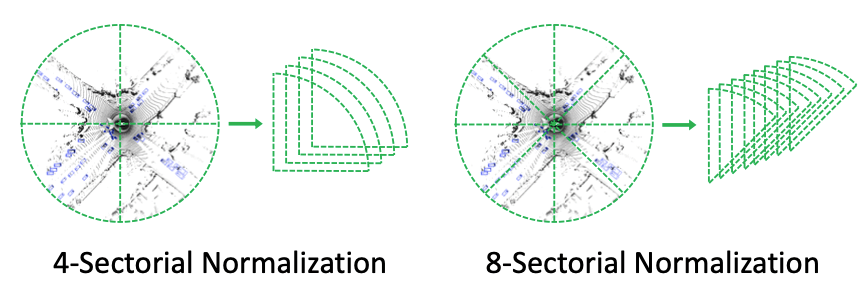
图4 扇形区域归一化(Sectorial Normalization)
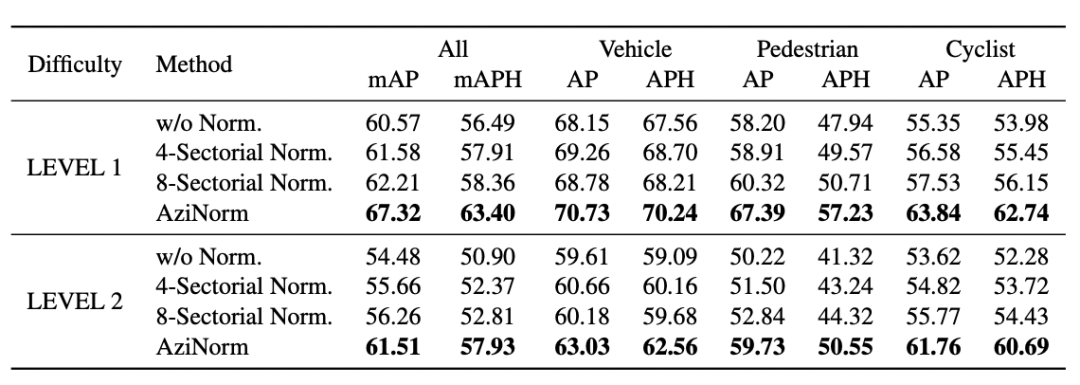
表3 归一化粒度 (Normalization Granularity)
3. 消融实验表4是相关的消融实验,验证了Azimuth Normalization的性能提升主要来自于旋转变换,即对径向方向的归一化,以及Azimuth Normalization对patch的形状layout、尺寸radius、间距stride的选择不敏感。
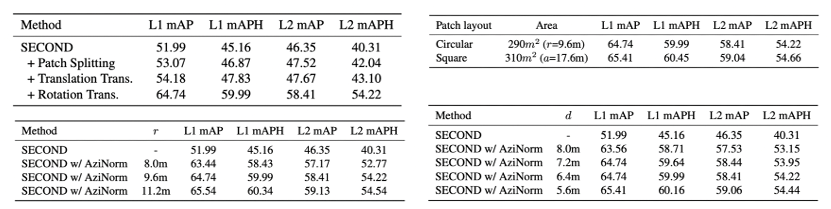
表4 消融实验
总结
Azimuth Normalization利用径向对称性对点云数据进行归一化,带来在数据效率、收敛速度、性能上限三个方面的提升,能够减少感知算法对于数据量的需求,降低标注成本,并且在对感知精度要求高的离线应用场景中有较大的应用价值,如自动标注(Auto Labeling)和生成高精地图(HD Maps)。
原文标题:CVPR 2022 | 基于径向对称性和分治策略的点云方位角归一化
文章出处:【微信公众号:地平线HorizonRobotics】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
方位角
+关注
关注
0文章
4浏览量
6754 -
点云数据
+关注
关注
0文章
13浏览量
1514 -
地平线
+关注
关注
0文章
344浏览量
14960
原文标题:CVPR 2022 | 基于径向对称性和分治策略的点云方位角归一化
文章出处:【微信号:horizonrobotics,微信公众号:地平线HorizonRobotics】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

基于深度学习的三维点云分类方法

英伟达推出归一化Transformer,革命性提升LLM训练速度
输电线路激光雷达点云监测装置的功能特点和技术参数介绍
激光雷达点云数据包含哪些信息
【大规模语言模型:从理论到实践】- 每日进步一点点
请问对雷达获取的原始数据进行归一化处理的具体方法是什么?
基于毫米波的人体跟踪和识别算法
康谋分享|aiSim5激光雷达LiDAR模型验证方法(二)

基于深度学习的方法在处理3D点云进行缺陷分类应用






 工商网监
工商网监
评论