 用NVIDIA ISAAC-SDK开发机器人应用程序
用NVIDIA ISAAC-SDK开发机器人应用程序
NVIDIA ISAAC 软件开发工具包 的模块化和易于使用的感知堆栈继续加速各种移动机器人的发展。 ISAAC sdk2020.1 引入了 Python API ,使那些熟悉 Python 的人更容易构建机器人应用程序。
在这篇文章中,我们将探讨这个特性,并分享如何使用 Python 构建您自己的 ISAAC 应用程序的分步指南。我们在 ISAAC SDK 中介绍 Python 编程,并举例说明如何创建应用程序;如何使用代码、模块和数据流;以及如何处理不同的数据类型。我们用示例来总结文章,将子图添加到同一个应用程序中,并将其部署到 Jetson 上。我们还将向您展示如何使用 Jupyter 笔记本电脑,这是一个面向 Python 开发人员的强大 UI 工具。对于更高级的 Python 开发人员,我们还提供了在移动机器人上部署 ISAAC 应用程序以及在 ISAAC Sim 中部署协作机器人手臂的例子。
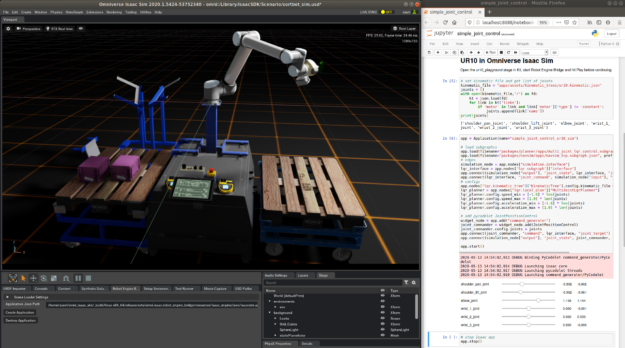
图 1 。使用 Jupyter 笔记本和 ISAAC SDK Python API 在 ISAAC Sim 中控制虚拟机器人。
ISAAC SDK 中 Python 编程入门
为了指导您使用 Python 创建一个 ISAAC 应用程序,请创建一个 mybot.py 应用程序文件。从 apps 文件夹下的新文件夹开始, //apps/mybot 。用下面的代码创建一个构建文件,并将其保存在 //apps/mybot/BUILD 下,以便 Bazel 能够识别它。
ISAAC SDK 中 Python 编程入门
为了指导您使用 Python 创建一个 ISAAC 应用程序,请创建一个mybot.py应用程序文件。从 apps 文件夹下的新文件夹开始,//apps/mybot。用下面的代码创建一个构建文件,并将其保存在//apps/mybot/BUILD下,以便 Bazel 能够识别它。
load("//engine/build:isaac.bzl", "isaac_py_app") isaac_py_app( name = "mybot", srcs = ["mybot.py"], data = [], modules=[], deps = [ "//engine/pyalice", ], )
在构建文件中,//engine/pyalice是 Python API 的支持代码,mybot.py是用 Python 编写的 robot 应用程序。将下面的代码放入//apps/mybot/mybot.py并用bazel run apps/mybot:mybot运行它。您可以通过控制台 spew 判断它正在运行,您可以使用经典的 CTR L-C 随时停止它。
from engine.pyalice import Application app = Application(name="mybot") app.run()
当应用程序运行时,将浏览器指向http://localhost:3000,您将在视力中看不到任何内容,这是 ISAAC SDK 中的可视化工具。
了解代码、模块和数据流
ISAAC SDK 为机器人应用程序提供了许多构建块,称为代码。
其中一些代码可以按原样提供,比如录音机。其他模块打包为模块,必须在代码集可用之前显式加载这些模块。将以下模块添加到刚刚创建的 Bazel 构建文件中,以便加载它们。
modules = [ "message_generators", "viewers", ],
现在可以使用在app.run之前创建的应用程序实例从 Python 加载它们:
app.load_module('message_generators')
app.load_module('viewers')
在 ISAAC SDK 中,数据由传感器生成,并在代码实例之间流动,直到它们被执行器消耗。要从加载的 codelet 创建实例,请在调用之前将以下代码添加到 Python 应用程序应用程序运行.
node_src = app.add('src')
component_src = \ node_src.add(app.registry.isaac.message_generators.ImageLoader, 'ImageLoader')
这里创建了一个名为src的节点。消息生成器模块提供的ImageLoader的组件以ImageLoader的名称创建,并附加到src的节点上。它将指定 PNG 文件中的图像数据作为ColorCameraProto消息发布,就像它们来自真实的相机一样。您可以指定要从中加载数据的图像以及其他几个参数(尽管在本示例中这些参数并不重要)以及消息发布的频率。有关详细信息,请参阅ISAAC 消息_ generators . ImageLoader。
component_src.config['color_filename'] = '/home/bob/Pictures/panda.png' component_src.config['focal_length'] = [35.0, 35.0] component_src.config['optical_center'] = [300.0, 400.0] component_src.config['tick_period'] = '1hz'
为了可视化摄像机图像,彩色摄影机代码将有所帮助。类似地,您可以使用以下代码创建它的实例:
node_sink = app.add('sink')
component_sink = \ node_sink.add(app.registry.isaac.viewers.ColorCameraViewer, 'ColorCameraViewer')
数据应该在代码之间流动。但是,必须在它们之间建立连接才能使数据流动。从文档中可以看出,CameraGenerator有三个输出通道。选择ColorCameraProto消息发布到的 color _ left 频道。类似地,您可以看到ColorCameraViewer代码从color_listener通道读取消息。连接它们(称为“边缘”):
app.connect(component_src, 'color', component_sink, 'color_listener')
再次运行应用程序(mybot.py),并检查 Sight 是否有图像。
在 Python 中使用不同的 ISAAC 图像数据类型
ISAAC SDK 允许您在应用程序中使用多个数据源:
- 记录的传感器数据(容器)
- 真实传感器数据(摄像机)
- 模拟传感器数据
在本节中,我们将解释如何在 Python 应用程序中使用这些数据类型。
使用摄像头
ISAAC SDK 支持许多带有V4L2Cameracodelet 的 USB 摄像头。
在本节中,您将使用 Realsense 摄像头,它由realsense模块中的RealsenseCamera代码集支持。类似地,你可以从视线中看到摄像机镜头,就像之前的图像一样。因为这是对ImageLoader的直接替换,所以可以使用命令行参数在它们之间进行切换。有关如何在 Python 中处理命令行参数的更多信息,argparse- 命令行选项、参数和子命令的解析器。您将得到如下代码示例:
parser = argparse.ArgumentParser(description='Sample Python API app')
parser.add_argument('--source',
type=str,
dest='source',
help='The source to get data from',
choices=['camera', 'image'],
default='camera')
args, _ = parser.parse_known_args()
if args.source == 'image':
app.load_module('message_generators')
component_src = \
node_src.add(app.registry.isaac.message_generators.ImageLoader, 'src')
component_src.config['color_filename'] = '/home/bob/Pictures/panda.png'
component_src.config['focal_length'] = [35.0, 35.0]
component_src.config['optical_center'] = [300.0, 400.0]
component_src.config['tick_period'] = '1hz'
app.connect(component_src, 'color', viewer_component, 'color_listener')
elif args.source == 'camera':
app.load_module('realsense')
camera = app.add("cam").add(app.registry.isaac.RealsenseCamera)
camera.config.rows = 480
camera.config.cols = 640
camera.config.color_framerate = 30
camera.config.depth_framerate = 30
app.connect(camera, 'color', viewer_component, 'color_listener')
app.run()
如前所示, PythonAPI 提供了处理不同环境的灵活性。
使用木桶
使用真实的传感器数据是直观的,但是这样做并不总是实际可行的。木桶能帮上忙。 Cask 是用于记录 ISAAC SDK 中的消息的格式。在 ISAAC SDK 中,可以记录一个消息流,并在以后回放以用于调试或分析。要从 Realsense 摄像头录制图像流,请尝试在//apps/samples/camera:record_realsense运行示例应用程序。
有了录音桶,你可以在没有真正的传感器的情况下随时随地重放和播放消息流。假设记录的容器位于/home/bob/cask/的文件夹中。您可以使用Replay代码来检索消息:
player_node = app.add('player')
player_component = player_node.add(app.registry.isaac.alice.Replay)
player_component.config['cask_directory'] = '/home/bob/cask'
app.connect(player_component, 'color', viewer_component, 'color_listener')
类似地,您可以向 Python 应用程序添加一个 cask 作为一个可能的选项,就像您使用 realseness camera 一样。这里,名称color是用于记录彩色相机图像流的通道名称。然后你就可以查看视频流,就好像它来自真实的摄像机一样。
使用模拟传感器
如前所述,您已经有了一个 Python 应用程序,可以在记录的传感器数据( cask )和真实传感器数据( camera )之间切换。现在再添加一个可能的数据源:来自 ISAAC Sim Unity3D 的模拟传感器。将 Sim 选项添加到命令行参数源,并将模拟相机消息流连接到查看器以进行可视化,如以下代码示例所示:
parser.add_argument('--source', type=str, dest='source', help='The source to get data from', choices=['cask', 'camera', 'image', 'sim'], default='sim')
… if args.source == 'image': ...
elif args.source == 'cask': ...
elif args.source == 'camera': ...
elif args.source == 'sim': app.load('packages/navsim/apps/navsim_tcp.subgraph.json') app.connect('interface/output', 'color', 'viewer/ColorCameraViewer', 'color_listener') app.run()
检索 ISAAC 是 Unity3D。有关详细信息,请参阅ISAAC Sim Unity3D。
启动 ISAAC 是 Unity3D :
./build/sample.x86_64 --scene medium_warehouse
默认情况下, Python 应用程序尝试与同一主机上的模拟对话。如果应用程序正在另一台主机上运行,请为组件interface/output配置相应的主机参数。有关详细信息,请参阅isaac.alice.TcpSubscriber。运行该应用程序,模拟摄像机的镜头可以看到。
镜头来自安装在模拟机器人上的模拟摄像机。试着在模拟图形用户界面( GUI )上玩一些可移动的物体,比如纳米盒子,看看模拟相机的工作原理和真相机一样。
用子图把它拉到一起
正如您所注意到的,组件(从代码创建的实例)和连接它们的边组成了一个图形。这样的图可以从 JSON 文件加载,也可以根据需要从 Python 应用程序加载。有关详细信息,请参阅 MIG 。
例如,模拟通信子图packages/navsim/apps/navsim_tcp.subgraph.json封装了用于使用 TCP 与 ISAAC Sim Unity3D 或 NVIDIA Omniverse 通信的节点、组件和边。要使其对应用程序可用,请将以下 Bazel 数据依赖项添加到您先前创建的生成文件中:
data = [ "//packages/navsim/apps:navsim_tcp_subgraph", ],
在 Python 应用程序中,可以使用以下命令加载它:
app.load('packages/navsim/apps/navsim_tcp.subgraph.json')
子图组件更像是由一组节点组成的配方,而不是容器。加载子图更像是按照配方创建节点和组件。在视图中,您可以看到从子图(图 4 )创建的所有节点(场景管理器、接口)。通过将它们与其他节点连接,可以使用app.connect创建更复杂的应用程序。
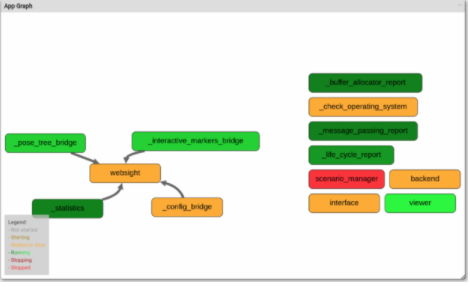 图 4 。显示各种子图使用情况的计算图。
图 4 。显示各种子图使用情况的计算图。当加载多个子图时,命名冲突 MIG ht 会发生,因为在任何应用程序中,节点都需要具有唯一的名称。若要避免此类冲突,请使用另一个参数加载子图:
app.load( 'packages/navsim/apps/navsim_tcp.subgraph.json', 'simulation', )
这里,第二个参数是 JSON 文件中指定的所有节点的“ node name prefix ”。例如,packages/navsim/apps/navsim_tcp.subgraph.json文件指定一个名为interface的节点。前面的语句将创建一个名为simulation.interface的节点,而不是interface。
在 Jetson 上部署应用程序
现在有了一个 Python 应用程序。在真正的 Jetson 板上运行只需要一个命令:
./engine/build/deploy.sh -h -p //apps/mybot:mybot-pkg -d jetpack43
有关将应用程序部署到 Jetson 的更多信息,请参阅入门和在 Jetson 上部署和运行。
使用 SSH 连接到您的 Jetson 板或从 GUI 打开一个终端并检查文件夹/home/nvidia/deploy/bob/mybot-pkg。如果您在 Jetson 和开发设置上使用不同的用户名,请将nvidia替换为 Jetson 板上的用户名,将 bob 替换为开发设置上的用户名。
使用以下命令在 Jetson 上运行应用程序:
nvidia@Jetson:~/deploy/bob/mybot-pkg$ ./run apps/mybot/mybot.py
如果您正在使用存储库之外的资源,请考虑将它们添加到应用程序的 Bazel 依赖项中,以便可以使用deploy.sh将它们与应用程序一起自动部署到deploy.sh。
如果您在 PC 机上使用 ISAAC Sim Unity3D ,则可以正常通信。
使用 Jupyter 笔记本
因为这里有 pythonapi ,所以 Jupyter 笔记本肯定可以工作。将以下生成文件与空的mybot.ipynb一起使用:
isaac_jupyter_app(
name = "mybot",
modules = [
"message_generators",
"viewers",
],
notebook = "mybot.ipynb",
)
以类似于 Jetson 板或 X86 工作站的方式部署应用程序,并使用以下命令启动 Jupyter :
jupyter notebook apps/mybot/mybot.ipynb
你现在可以走了。 run 函数被阻塞,只有在 robotic 应用程序停止时才返回。要以交互方式使用 robotics 应用程序,请相应地使用 start 和 stop 函数。
Python 在模拟移动机器人中的应用
在使用模拟传感器工作的部分,有一个模拟机器人,上面安装了模拟摄像机。 ISAAC Sim Unity3D 是用来模拟移动机器人的。对于在 ISAAC Sim Unity3D 中控制带有差分基座的模拟机器人的示例 robot 应用程序,请检查//apps/navsim:navsim_navigate中的应用程序。组件和子图可以在 JSON 文件apps/navsim/navsim_navigate.app.json中找到。有关详细信息,请参见ISAAC Sim Unity3D。
用 Python 模拟机器人手臂
除了移动机器人,用 Jupyter 笔记本电脑进行简单的联合控制SDK 也可以用于构建机器人手臂的应用程序。有了Omniverse ISAAC ,你可以在没有真正硬件的情况下使用模拟机械手臂。有关更多信息,请按照用 Jupyter 笔记本电脑进行简单的联合控制上的“ UR10 in用 Jupyter 笔记本电脑进行简单的联合控制用 Jupyter 笔记本电脑进行简单的联合控制Sim ”会话说明操作。应用程序将在模拟中控制机械臂,如图 5 所示。
 图 5 。通用机器人的 UR10 正在使用 Jupyter 笔记本电脑进行模拟控制。
图 5 。通用机器人的 UR10 正在使用 Jupyter 笔记本电脑进行模拟控制。以下是应用程序中发生的情况。第一件事是加载一个子图,允许通过 TCP 与模拟器通信。
app.load(filename="packages/navsim/apps/navsim_tcp.subgraph.json", prefix="simulation")
若要为关节生成平滑运动,请为节点加载另一个子图:
app.load( filename="packages/planner/apps/multi_joint_lqr_control.subgraph.json", prefix="lqr")
该子图封装 LQR 规划器的节点,生成当前关节状态和目标关节位置的命令。将仿真节点与规划器的节点连接起来,以使机械臂关节状态消息和命令消息在它们之间流动:
app.connect(simulation_node["output"], "joint_state", lqr_interface, "joint_state") app.connect(lqr_interface, "joint_command", simulation_node["input"], "joint_position")
用 Python 编码的代码集 PyCodeletJointPositionControl从滑块读取目标关节位置值,并将这些值作为CompositeProto消息发布:
class JointPositionControl(Codelet):
def start(self):
self.tx = self.isaac_proto_tx("CompositeProto", "command")
self._widget = CompositeWidget(self.config.joints "position", self.config.limits)
def tick(self):
self.tx._msg = self._widget.composite
self.tx.publish()
有关详细信息,请参见创建 Python 代码。
然后,JointPositionControl代码集连接到一个节点,并连接到 LQR planner 的目标输入通道:
widget_node = app.add("command_generator")
joint_commander = widget_node.add(JointPositionControl)
app.connect(joint_commander, "command", lqr_interface, "joint_target")
启动应用程序应用程序启动你可以随意使用手臂。
带模拟摄像机的模拟机械臂
在 Omniverse ISAAC Sim 中,要有一个带摄像头的机械臂,请加载 stageomni:/Isaac/Samples/Isaac_SDK/Scenario/sortbot_sim.usd。在 Omniverse ISAAC Sim 中启动仿真和机器人引擎桥,并将视口从透视切换到腕部摄影机,如图 6 和 7 所示。
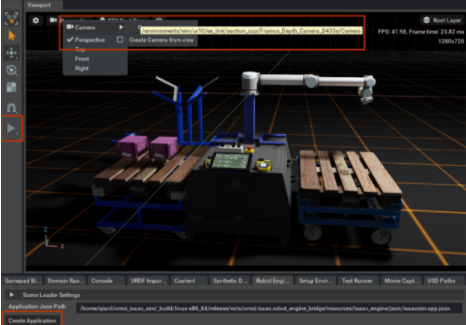 图 6 。 ISAAC Sim 中机器人的透视图。
图 6 。 ISAAC Sim 中机器人的透视图。
与之前的应用程序一样,您可以将模拟摄影机通道连接到ColorCameraViewer代码板以可视化画面,并将DepthCameraViewer连接到可视化模拟深度传感器数据。
app.load_module("viewers")
viewers = app.add("viewers")
color_viewer = viewers.add(app.registry.isaac.viewers.ColorCameraViewer, "ColorViewer")
app.connect(simulation_node["output"], "color", color_viewer, "color_listener")
depth_viewer = viewers.add(app.registry.isaac.viewers.DepthCameraViewer, "DepthViewer")
app.connect(simulation_node["output"], "depth", depth_viewer, "depth_listener")
depth_viewer.config.max_visualization_depth = 3
启动应用程序,模拟的摄像机镜头应该会出现在眼前:
 图 7 。 ISAAC 模拟中机器人的手腕视图。
图 7 。 ISAAC 模拟中机器人的手腕视图。总结
在本文中,您使用 pythonapi 从头创建了一个机器人应用程序。您使应用程序可以使用真实的摄影机、录制的摄影机数据和模拟摄影机。我们还向您展示了如何使用 pythonapi 处理模拟移动机器人和模拟机械臂。做机器人玩得开心!
关于作者
Yang Liu 是一名软件工程师,负责开发 NVIDIA ISAAC SDK 的各个部分。他获得了达拉斯德克萨斯大学计算机科学博士学位。
审核编辑:郭婷
-
API
+关注
关注
2文章
1499浏览量
61975 -
应用程序
+关注
关注
37文章
3267浏览量
57684 -
python
+关注
关注
56文章
4793浏览量
84634
发布评论请先 登录
相关推荐
NVIDIA通过加速AWS上的机器人仿真推进物理AI的发展
利用NVIDIA Isaac平台构建、设计并部署机器人应用

NVIDIA助力Figure发布新一代对话式人形机器人
NVIDIA与学术研究人员联合开发手术机器人
NVIDIA提供一套服务、模型以及计算平台 加速人形机器人发展
NVIDIA 加速人形机器人发展

逐际动力携手英伟达Isaac平台, 助力通用机器人研发
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展

全球机器人开发领域采用NVIDIA 机器人开发和生产
使用NVIDIA Isaac Manipulator生成抓取姿势和机器人运动

NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA入局人形机器人!Isaac平台迎来重要更新

NVIDIA Isaac将生成式AI应用于制造业和物流业

NVIDIA Isaac平台为AI机器人开发提供支持
使用 NVIDIA Isaac 仿真并定位 Husky 机器人






 工商网监
工商网监
评论