 一种可在二维平面内进行全自由度独立控制的光驱动微米器件
一种可在二维平面内进行全自由度独立控制的光驱动微米器件
当光与物质发生相互作用时,伴随着光子的散射或者吸收常常会发生光子动量或角动量的转移,从而产生施加在物体上的力或力矩。这些力和力矩作用在微观物体上可以产生很大的加速度,因此可以用光来对微观物体进行非接触操控。以光镊技术为代表的光操控在一些领域获得成功的应用,特别是对于电磁中性的物体,例如电介质微粒、生物细胞以及原子分子等。Arthur Ashkin 教授因此获得2018年诺贝尔物理学奖。但是迄今为止,利用光来实现对微观物体的全自由度操控(二维空间:2个平动自由度+1个转动自由度;三维空间:3个平动自由度+3个转动自由度)仍然是一个很大的挑战。而利用电场或磁场的微观操控也是类似的情况。
近日,来自德国维尔茨堡大学物理学和天文学院(注:伦琴发现X射线的地方)纳米光学组的吴晓飞博士和 Bert Hecht 教授等研究人员首次实现了一种可在二维平面内进行全自由度独立控制的光驱动微米器件(大小约2 μm,质量约2 pg)。该器件在整体结构和控制机理上与四旋翼无人机十分相似(图1),因而被称为微米无人机(microdrone)。
相关研究论文"Light-driven microdrones"于2022年4月21日在线发表在Nature Nanotechnology,并被 Nature 在“Research Highlight”【1】和 Nature Nanotechnology 在“News & Views”【2】中报道。
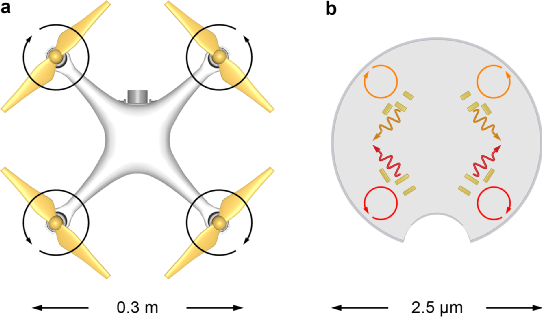
图1 四旋翼无人机和光驱动微米无人机的对比。
图源:吴晓飞(德国维尔茨堡大学物理学和天文学院纳米光学组)
四旋翼无人机
四旋翼无人机是我们日常生活中见到的最多的一种无人机(图1a),常用于摄影摄像、货物运输、灯光秀以及监视探测等。四旋翼无人机的广泛应用得益于两个主要的特点。首先,它是一种可以实现全部六个自由度控制的航空飞行器,而这一点是绝大多数其他航空飞行器做不到的。其次,相较于实现复杂控制的能力,四旋翼无人机的控制机理反而非常简单。它的全部活动机械部件仅仅是四个旋转电动机和螺旋桨,而它的所有操控也是通过对每个电动机的独立控制来实现。这其中的一个巧妙之处是四个螺旋桨分成了旋转方向相反的两对(图1a,黑色箭头表示旋转方向),因此通过调节两对螺旋桨转速之间的平衡就可以实现对转动自由度的控制。简单的结构和机理使得四旋翼无人机非常便于维护和控制。上述这两个特点又使得四旋翼无人机可以借助内置的传感器实现自动反馈控制,以保持非常稳定的飞行轨迹和姿态。“四旋翼无人机的这些特点正是我们希望我们的光操控器件也能够具备的。”吴晓飞博士如此表示。
微米无人机的结构和工作原理
同四旋翼无人机一样,微米无人机具备四个可独立控制的发动机,它们被对称地集成在一个透明圆形薄片内。每个发动机由一个纳米光学天线构成,并且由特定波长和特定圆偏振的光场驱动(图1b中橙色和红色圆形箭头分别表示两个波长和两个圆偏振)。类似于无线电和微波天线,光学天线是一种在光学波段有效实现传播场和局域场相互转换的结构,通常为金属纳米结构,尺寸小于半个光波长。当垂直于器件入射的光照射到这些纳米天线上时,它们会将相应的光分量沿特定的方向散射出去(如图1b中的橙色和红色的波状小箭头所示),从而产生横向的反作用力,推动器件的移动或转动。从图1还可以看出,和四旋翼无人机一样,微米无人机的四个发动机也是分成了手性相反的两对。
两个波长和两个圆偏振一共可以形成六种基本组合,分别可以产生二维平面内的三个自由度的六个方向的运动,即前−后、左−右的平动以及顺时针−逆时针的转动,如图2所示。这些对基本自由度的控制就构成了器件沿任意轨迹运动的基础。需要指出的是,在进行复杂轨迹的控制时,每个波长的光其实是两个圆偏振分量的叠加,因此不是纯圆偏振光。
纳米发动机的原理决定了即使使用宽场光同时照射四个发动机,也不会造成对各个发动机控制的串扰。另外由于圆偏振光的连续旋转对称性,发动机对驱动光的响应也与器件的朝向角度无关。这就意味着,当使用两个波长的重叠的宽场光来驱动微米无人机时,所有的操控仅仅通过调控每个发动机对应的光分量的功率就可以实现。这一点也是和四旋翼无人机一致的地方,即控制机理非常简单。
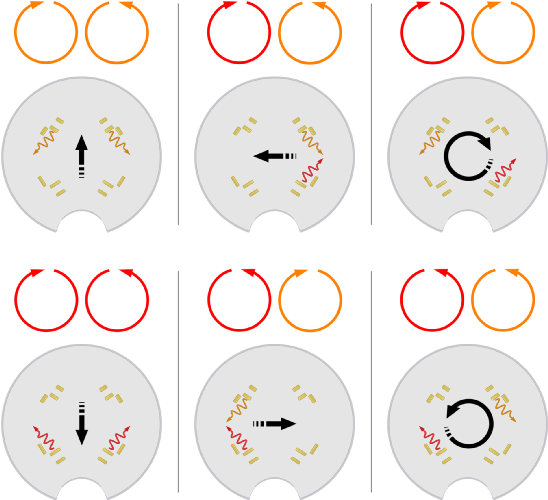
图2 微米无人机三个基本自由度的控制(黑色箭头表示运动方向)
图源:吴晓飞(德国维尔茨堡大学物理学和天文学院纳米光学组)
器件的制备
纳米发动机的设计与制备是这项研究成功的关键。在制备方面,吴晓飞根据多年积累的微纳米加工的技术和经验,开发出一种高效和高精度的单晶金纳米结构的制备方法。该方法利用先进的氦离子显微镜的聚焦离子束在化学合成的单晶金片上刻出纳米发动机结构的轮廓,然后再将整个金片从基底上揭下来,从而将发动机结构留在基底上。刻蚀所利用的图形则是基于每个像素的坐标、剂量和顺序,通过脚本程序产生。相比于传统的用聚焦离子束刻蚀制备纳米结构的方法,该方法不仅大大节约了刻蚀的时间,而且在很大程度上改善了最终结构的形貌和精度(图3a)。这也是世界上首次报道利用氦离子束刻蚀来批量制备较复杂的纳米结构。在完成纳米发动机结构的制备后,微米无人机的机身则是通过电子束光刻和化学腐蚀的方法制备而成(图3b),即用具有所需形状的光刻胶薄片(厚度200 nm)将纳米发动机包覆于内部,起到对发动机结构的固定和保护作用。
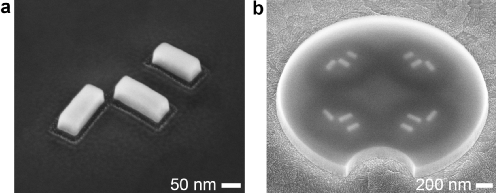
图3 纳米发动机和微米无人机的扫描电镜显微图(上下40°倾斜)
图源:吴晓飞(德国维尔茨堡大学物理学和天文学院纳米光学组)
二维平面全自由度控制的实验证明
视频1展示了对微米无人机在二维平面上操控的一些初步验证结果,包括三个基本自由度的控制和沿较复杂的路径的运动(8字形和螺旋线)。其中可以明显看到由于布朗运动的影响,器件的运动轨迹并不平滑。这也是该项研究接下来要解决的问题。
研究展望
微米无人机的概念和原理可以扩展到三维运动的全部六个自由度的操控,而全自由度的独立控制使得利用反馈控制来自动矫正诸如布朗运动等带来的扰动成为可能。维尔茨堡大学的科学家们期待在不远的将来可以实现微米无人机的稳定的三维运动以及悬停(位置与姿态的保持,即便是在液体中),就像四旋翼无人机所能做到的那样,由此将微观操控技术推进到一个全新的水平。他们相信,以光驱动微米无人机为基础,人们可以探索很多新奇的应用。除了比较直接的微观物体的转移与操控等应用外,还可以将一些功能性的光学器件装配在微米无人机上,例如纳米光镊、传感器、金属探针等等,从而将这些器件利用在特殊的情形或环境中,甚至执行对微观环境的精确扫描。
审核编辑 :李倩
-
微波天线
+关注
关注
0文章
21浏览量
12013 -
纳米
+关注
关注
2文章
696浏览量
36980 -
无人机
+关注
关注
229文章
10422浏览量
180201
原文标题:Nat. Nanotechnol. | 光驱动微米无人机
文章出处:【微信号:ZHISHIKU-Pro,微信公众号:知识酷Pro】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RS232接口的二维影像扫描引擎,广泛用在医疗设备上扫一维二维码

PDA二维数据采集器的工作原理,二维码采集器有什么推荐产品?

二维内嵌扫码模组用于自助储物柜,快速扫描各种一维二维条码

中国科大实现耦合高度可调的二维硅基量子点阵列
一种基于深度学习的二维拉曼光谱算法

二维码识读设备有哪些类型
labview按行读取二维数组之后再按读取顺序重新组成二维数组如何实现?
二维力传感器怎么安装,在安装二维力传感器的安装步骤

技术|二维PDOA平面定位方案

二维PDMA可以使用描述符链吗?
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
二维码扫码模块嵌入到电梯设备里
飞凌嵌入式ElfBoard ELF 1板卡-在线二维码生成器
基于FPGA的六自由度机器人视觉伺服控制方案设计






 工商网监
工商网监
评论