 VFD跳频参数与谐波之间有什么联系
VFD跳频参数与谐波之间有什么联系

变频驱动器(VFD)可以输出几乎任何频率的模拟波形。然而,为了真正有用,必须避免系统中的谐波和谐振,并且应该设置频率参数。
变频驱动器(VFD)是驱动三相电机的最常用方法之一。输出是一个简单的直流电压脉冲,其持续时间缓慢增加和减少以复制交流电流信号。通过VFD内部的复杂处理,它可以输出几乎任何频率的模拟波形——但仅仅因为某个频率是可能的,并不意味着它是一个好主意。某些频率可能会导致系统中的谐波和共振引起过度振动,但VFD设计人员已经采用了一些方法来减少这个问题。
VFD的目的是模拟典型三相系统的供电,只是增加了通过改变模拟输出的频率来改变电机速度的灵活性(顾名思义)。
这是启动和驱动电机的理想方法,因为可以控制启动速度和扭矩并将其保持在可接受的水平。但是,这种加速或减速电机的过程可能存在一些缺点。
实际上有两个频率对VFD的运行至关重要。两者都可以从参数列表中控制,因为由于某些不希望的频率而出现相关但不同的问题。电流信号的Hz输出的这两个频率值(通常显示在VFD上)以及提供电脉冲的PWM频率。两者都将深入讨论。
三相交流赫兹输出
在VFD内部,实际上有一个将输入交流电转换为直流电的转换器。然后,该DC会以高频仔细脉冲,但会根据不同的比率保持开启和关闭。结果是流向电机的电流可以增加或减少。通常,为了确保电机的安全运行,频率不应高于电机的工作赫兹(50或60Hz)。
电机加速和减速的持续时间被仔细控制,在典型的跨线启动中,电机尽可能快地加速上升,吸收巨大的电流。较长的加速和减速时间将减少启动时的电流消耗。通常,这很好,但特定频率可能会导致机械问题。
每个系统都有一些弹簧常数——要么是通过实际的机械弹簧,要么是通过组件的自然弹性特性。这个弹簧因素是无法避免的。每个弹簧因子都有自然共振频率,在恰到好处的重复输入力将导致每次“反弹”增加,可能会失控。这是一个共振频率,它可以用各种先进的系统动力学理论来计算,但更有可能的是,随着电机在加速时以精确的RPM运动,系统的振动会在短时间内增加,这种频率会被注意到上升并减速。
由于可以在VFD显示器上直接监控电流,因此该谐振频率也可以被视为特定RPM下电流的增加。
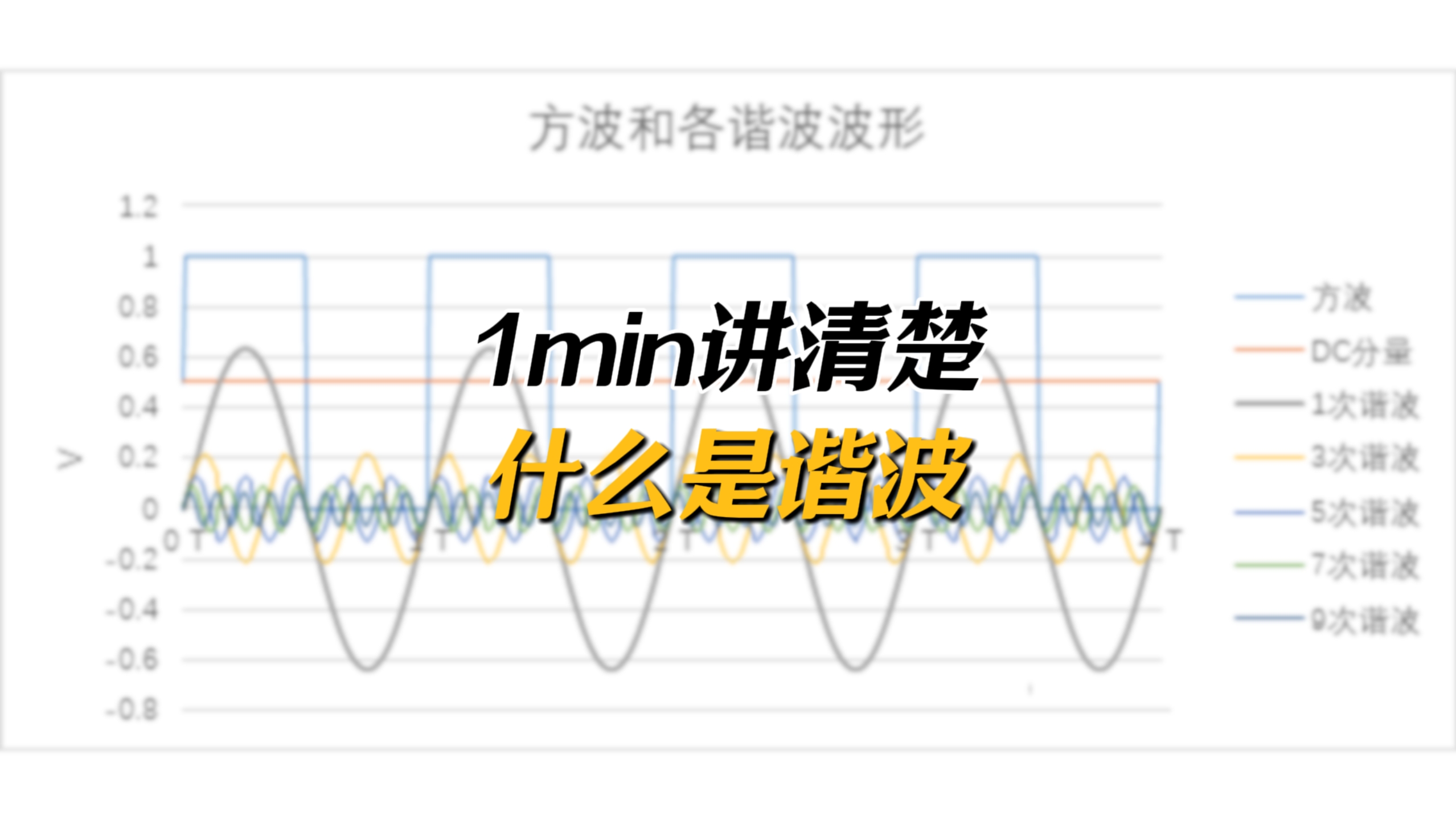
由于设备通常由不同但相互连接的部分组成,因此可能存在不止一个谐振频率——甚至一个系统也可能有多个导致问题的频率。通常,这些将是单个基频的整数倍。这些被称为“谐波”。
解决这些共振问题的一种方法是在VFD中使用一组称为“跳跃频率”的内置参数。举几个具体的例子:对于AllenBradleyPowerFlex525,参数A448、450、452和452提供四个跳跃频率,其中A449、451、453和455提供围绕每个跳跃频率的整个频率范围,其中将不允许驱动器运行。SiemensSinamicsG120驱动器使用参数p1091和1092设置“跳跃速度”,而p1101提供“跳跃带宽”。最后,AutomationDirect的GS1驱动器使用参数P1.10、11和12来控制跳跃频率,而P1.17控制跳跃频带。
这些参数有时不用,但肯定可以用来防止机器谐波特性引起的机械故障。
PWM载波频率
第二频率是固定的。尽管电流可能在0-60Hz之间变化,但此脉冲频率是固定的,远高于60Hz。通常默认情况下,它约为6,000到10,000Hz(6kHz到10kHz)。
调整这个频率可以同时解决和制造问题。较高的PWM频率会在附近的通信线路上产生电磁噪声,从而中断通信。另一方面,较低的频率会在人类听觉的较低范围内产生更多的物理噪声。如果在这些领域之一遇到重大问题,PWM载波频率的调整可能会有一些灵活性,但在尝试解决不同问题时要注意引入的新问题。
-
VFD
+关注
关注
0文章
73浏览量
14891 -
谐振
+关注
关注
5文章
438浏览量
41965 -
变频驱动器
+关注
关注
2文章
32浏览量
4396
发布评论请先 登录
贴片电阻的封装和阻值之间有什么联系?
HCS300:高性能代码跳频编码器的技术剖析与应用
有哪些方法可以降低谐波对电能质量在线监测装置测量误差的影响?
谐波对功率因数有何影响?谐波影响下功率因数的补偿上限设置问题
XL2417D无线收发芯片跳频机制介绍

减少谐波对新能源设备影响的措施有哪些?
谐波源定位常用的方法有哪些?
谐波在线监测装置安装位置有什么要求?
【干货】跳频扩频怎么抗干扰

谐波对双鼠笼异步电机回路电气参数计算的影响
零序谐波驱动六相PMSM双电机串联系统研究
APHF系列宽带超高速捷变频频率综合器-小巧模块驱动快速跳频新

谐波监测装置、谐波在线监测、在线谐波监测装置与谐波在线监测装置有区别吗?电网中作用及工作原理



评论