 从硬件的角度将对机器人控制器的概述
从硬件的角度将对机器人控制器的概述
在闲聊时,提到了机器人控制的一些零碎概念,包括控制器、驱动器、运动控制器、PLC、单片机等,习惯了从理论和算法上谈控制,当回到硬件上时多少对这些概念有些模糊,甚至会混为一谈。控制系统是机器人的大脑,是工业机器人的核心零部件,本文将从硬件的角度将对控制器进行概述。
1 控制
(1)第一代控制
在最早的时候,控制器是由机械结构为控制手段的,以基地式仪表、水库水位测量等为代表,如图1,如果实际转速降低到期望值以下,调速器的离心力下降,控制阀会上升,进入蒸汽量增加,蒸汽机转速随之增大,达到控制转速的目的。
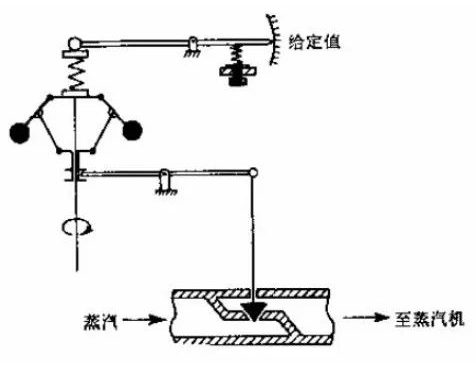
图1 蒸汽速度控制系统
在机器人方面,有我国著名的木牛流马、水转百戏木偶、鲁班鸟等纯机械控制的机器人,采用人力、水力、风力为动力进行自动结构,以及一些靠弹簧发条、重力作为驱动力的随动传动机器人,在当今控制领域亦不失为一种精妙的控制手段。
图3 依靠推力前行的足式设计
(2)第二代控制
随着继电器控制技术和调节器为代表,发展出了模拟控制技术,此时执行机构以电气元件、气动元件、液压元件等为主要机构,控制依靠继电器与主开关进行控制,如图4。
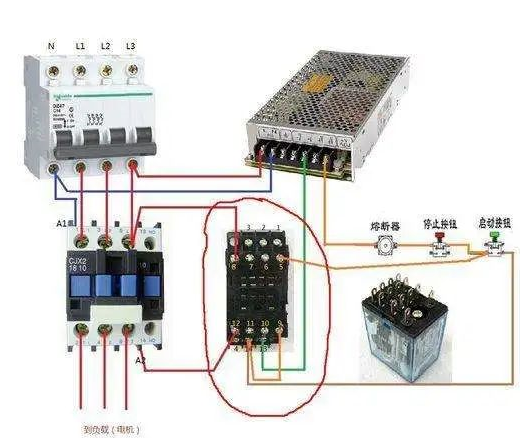
图4 继电器控制
可编程逻辑控制器PLC是基于继电器的基础上发展起来的,并迅速简化了电气连接,并丰富了控制手段。
如图5,EPSON六轴机器人是由PLC逻辑控制不同关节的转角,以满足一定的动作时序。
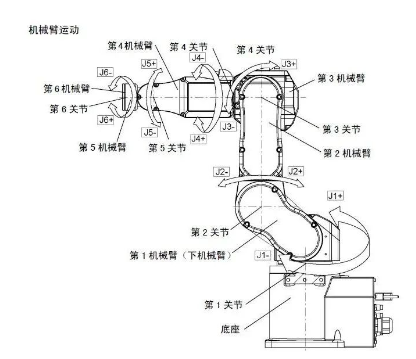
图5 EPSON六轴机器人
(3)第三代控制
20世纪70年代后,随着计算机的发展,采用单一计算机控制整个工业系统即直接数字控制是第三代控制系统,主要技术代表包括用于流程工业的集散控制系统、用于离散工业的可编程控制器、现场总线控制系统等。
此时,控制器的种类开始层出不穷,目前控制器有三种主要的控制方式:PLC控制、专用控制、PC-Based控制等,其特点如表1.
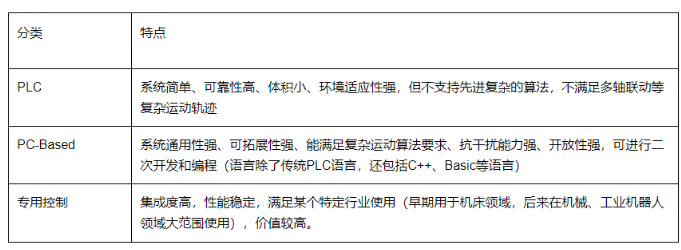
表1 不同控制方式及特点
在第三代控制发展下,控制领域扩大到运动控制、过程控制、开关量逻辑控制等,其中运动控制最常应用,并植入复杂算法以满足更智能更精准的功能需求。国产控制器是与国外产品相比,可控制的机器人类型齐全,主要差距在于操作精度和稳定性。
2 控制器
(1)伺服系统 与 控制系统的关系
伺服系统是系统终端执行结构根据控制控制指令实现包括位移、转速和力矩等唯独动作的设备总成,包括控制器、伺服驱动器、伺服电机、编码器等组成,决定了自动化机械的精度、控制速度和稳定性。
可分为液压、启动和电气三类,目前广泛使用的是电气伺服系统,其中交流同步伺服已成为高精度伺服系统的主流。
伺服系统是一种反馈控制系统,属于控制系统中的一种。
(2)运动控制器、控制器与驱动器
运动控制器是控制电动机运行方式的控制器,属于三类控制器中的专用控制器,比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。
运动控制主要涉及步进电机、伺服电机的控制,控制结构模式一般是:控制装置+驱动器+(步进或伺服)电机。
控制装置可以是PLC系统,也可以是专用的自动化装置(如运动控制器、运动控制卡)。
电机驱动器是用来控制和给电机供电的一个器件,其包括电机控制板和电机驱动板两个部分(均在驱动器内部)。
电机控制板上面包括主控芯片,pwm输出电路,滤波电路,加密芯片等部分,电机驱动板部分包括逆变器部分(即ipm或者igbt和二极管的组合),电源转换部分(包括整流部分,电源保护部分,放电部分等),电流采样部分(数字采样芯片或者电阻采样等方式),通信部分等等。
所以,三者关系即运动控制器属于控制器中的专用控制器一类,用于控制执行机构的运动,当执行机构是电机时,需要在运动控制器与电机之间使用驱动器。
(3)单片机、嵌入式控制器、PLC与运动控制卡
单片机一般用于电子电路的控制器,一般用于控制电路板上的元件,是一种芯片,不能单独使用;
而PLC、嵌入式控制器是由单片机、微控制器组成的通用控制器,可以直接使用;
运动控制卡则需要基于PC运行,属于PC-based控制器。
都用于嵌入式开发,但ARM是一种处理器架构,而单片机是一个包含了CPU内存ROM等的芯片,Arduino和树莓派相当于老年机与智能机的开发平台/板,对比如表2
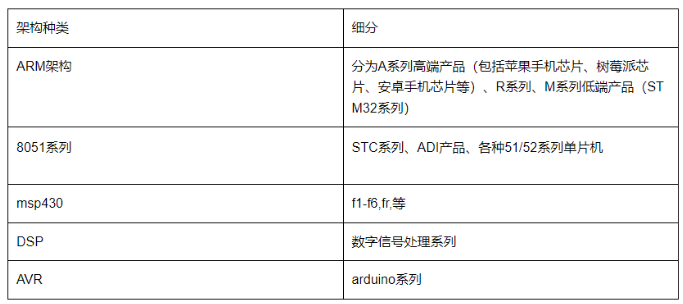
表2 嵌入式开发硬件架构
-
机器人
+关注
关注
211文章
28752浏览量
208934 -
plc
+关注
关注
5019文章
13401浏览量
465980 -
嵌入式控制器
+关注
关注
0文章
65浏览量
15227
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论