 毫米波雷达系统工作过程
毫米波雷达系统工作过程
毫米波雷达目前是车用探测雷达中最为主要的探测器件,但目前的毫米波雷达是进行二维扫描平面扫描,如何进行立体扫描是毫米波使用的重要研究方向,文章利用波束集中及 3D MIMO 计算实现了立体点云扫描。
目前的汽车领域智能驾驶中,车辆驾驶的安全性能,自动驾驶能力,探测精度,功能性能越来越受到消费者的关注。
毫米波雷达图对比其他车用传感器,具有显著优点,工作频率极高,波长短,能够具有较高的分辨率,同时具备全天候测量的能力,对比天气影响因素较小,雨雪天线情况下依然能够正常使用,特别适用于车辆使用。
毫米波雷达系统工作过程
传统毫米波雷达通过辐射的毫米波利用对探测物的反射波进行定位与回波显示,其工作的过程主要是:
雷达通过射频系统辐射电磁波对被探测物体进行电磁波的检测与扫描,利用反射回来的电磁波,进行放大与信号解析计算,可以计算出物体的远近距离以及结合不同的方位角计算出物体的左右间距离。利用多普勒效应在最终计算出移动物体探测的速度,方位等。
雷达系统通过辐射电磁波和接收物体反射电磁波对目标进行检测和定位,其工作过程主要为:
雷达通过天线发射特定波形的电磁波,在有效辐射范围内被目标截获,目标反射电磁波到很多方向上, 其中一部分能量返回至天线处被雷达接收,并通过放大,信号处理等过程最终计算出目标相对雷达的位置,移动速度,方位等信息。
图1 车载前置毫米波雷达
现阶段毫米波雷达主要应用于车辆前部,进行车辆前部碰撞预警,主要波束的工作模式为连续波和雷达的脉冲波束,工作模式为连续的波束,主要波形为 LMCW,CW,FSK。
车载毫米波雷达系统包含射频模块,信号处理模块,以及总体电路部分,目前的毫米波雷达俯仰角一般为平行于水平面±2 度,形成低俯仰角平面波束,对前方车辆能够进行位置速度的测量。
车载毫米波雷达数据处理方式研究对比
目前的车载毫米波雷达对于探测到的回波数据直接使用平面探测数据,或者进行毫米波数据探测计算,根据车辆运动的特征情况,形成毫米波雷达报警信号,目前报警信号分为两种:
一种为阈值报警,当达到一定的距离时,信号进行报警,此种报警方式较为简单,同时存在误报及预测不足的可能性。
另一种为系统内部计算的校验,毫米波雷达内部存有芯片,当收到多目标的扫描信号后,对信号进行分析,分析出自主的影响较大的主目标信号,排除杂绕信号,再将主副信号进行速度及距离的联合计算,形成低级别的报警及信号预测。
基于点迹进行报警处理,数据处理相对较为简单,主要步骤为对信号处理产生的原始点迹数据先进行单点报警处理, 对满足单点报警的目标点迹进行滑窗统计,当满足滑窗规则 n/m(m 为滑窗最大门限,n 为报警点迹数量)时形成雷达报警。
由于数据处理相对简单,所以雷达报警响应更快。若信号处理产生点迹质量不高,则需进行较多虚警处理,以提高雷达报警准确率。在虚警处理时需要更多考虑目标的运动特征。
分析数据之间的关联性,及目标数据在滑窗期间的变化规律。此种数据处理方式主要应用在级别较低的驾驶辅助系统,对盲区内目标数量不做具体要求,当目标处于盲区满足报警规则即可形成雷达报警。
雷达航迹处理主要步骤:雷达数据处理系统在获取信号处理产生的点迹数据后, 主要进行航迹数据关联、航迹起始、航迹滤波与预测、航迹管理与维持。
航迹处理的输入是经过坐标转换和点迹凝聚处理的一批原始点迹, 然后所有点迹与已有航迹进行相关处理,落入航迹的相关波门的点迹,即与航迹相关成功, 通过航迹滤波与预测选择是该航迹目标点的概率最大的点迹,若找到该点迹,对航迹进行更新处理;
若出现没有和所有航迹相关的点迹,则可能是新航迹点,若是新航迹点,利用航迹起始算法进行航迹起始,若不是新航迹点又不是已有航迹的目标点,则可能是还未起始成功的旧航迹目标点,航迹重现输出;若上述所有情况都不是,则把该点迹作为“ 非关联点迹”缓存到航迹数据库,进行下一步判断。
航迹处理的基本功能是循序渐进的,是对雷达当前观测周期点迹的归属进行分类, 其中的关键技术主要是点迹与航迹相关、航迹滤波与预测及航迹起始。
毫米波二维像的生成
目前现行的毫米波雷达频段为 77Ghz-81Ghz,较高的频率能够使毫米波雷达获得更高的分辨率,利用毫米波对于 X向回波的信号解析,测算出准确的目标距离,精度可以在10cm 以内。
同时利用毫米波雷达左右两侧的雷达回波天线,形成左右侧回波差,回波差经过计算得出相位差,利用相位差可以得到左右侧距离差,即角分辨率。同时利用探测物运动形成的多普勒效应,可以准确计算出物体的移动速度。形成多普勒像,最终得到物体的运行速度,分布图像。
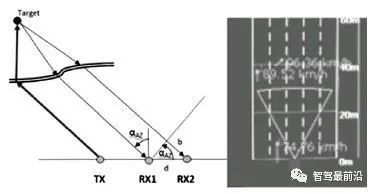
图2 二维毫米波雷达成像效果
高级的毫米波雷达辅助驾驶系统要求车载毫米波雷达同时跟踪道路上多个范围内目标,同时前向毫米波雷达需要跟踪车辆正前方不同的目标物,并对不同状态的目标物进行标记与跟踪,所以目前的毫米波雷达都是使用平面扫描模式,平面扫描也会导致适用范围受限,无法还原 3 维的点云效果,同时无法进一步提升传感器的使用范围。
三维图像扫描原理
目前的毫米波雷达已经不能满足于二维平面的扫描,现在车用的的雷达传感器希望能够扫描三维的点云数据,但基于现有的收发系统多进多出(MIMO)是为极大地提高信道容量,在发送端和接收端都使用多根天线,在收发之间构成多个信道的天线系统。
MIMO 系统的一个明显特点就是具有极高的频谱利用效率,在对现有频谱资源充分利用的基础上通过利用空间资源来获取可靠性与有效性两方面增益,其代价是增加了发送端与接收端的处理复杂度。
使用 MIMO 技术可以利用天线有效提高频谱扫描效率。利用现有的毫米波射频芯片,可采用 MiMO 阵列天线原理,利用 X,Y.Z 平面不同射频天线,回波相位差实现 3D 数据扫描。
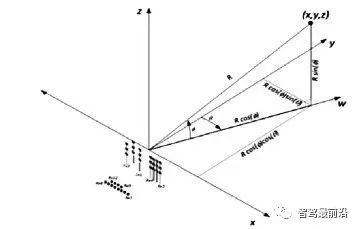
图3 3D毫米波雷达扫描示意图
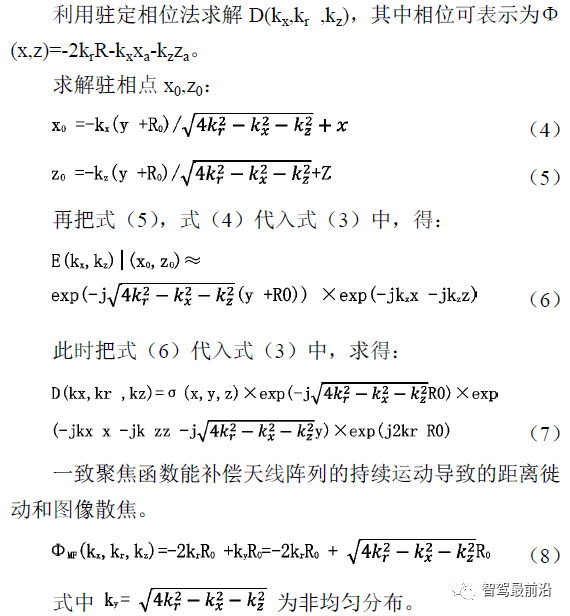
近场毫米波成像算法
假设目标点(x,y,z) 的发射系数为σ(x,y,z),则在扫描范围内的信号散射信息可表示为:

式中

二维频域波数与频率的关系是 f = ckr/2π,c 代表光速;exp(j2krR0)表示对接收到的数据在距离为 R0 的平面内进行邻近聚焦,即数据预处理。
为了计算方便,可以忽略考虑自由空间传播和天线阵列模式中的能量损失。对(1)式进行 二维傅里叶变换(FFT)为 D(kx,kr ,kz) :

近场毫米波成像算法主要依赖快速傅里叶变换(FFT),其中变量 x,y 的 FFT 空间波数域为 kx 和 kz。
假设对式(2)中的积分如下:

波束优化控制
利用超材料介质层,利用超材料介质层形成更好的波束汇聚效果。同等口径雷达加载超材料波束对比 3dB 波束宽度收窄 35%,完成了新型毫米波雷达天线加载超材料的设计,具体为采用十字形超材料单元结构。
毫米波雷达天线加载超材料带宽为 76-82GHz,完全可以覆盖毫米波雷达的工作频段。加载超材料后,在φ=90º方向和φ=0º方向,天线的栅瓣减小了,可以有效提高系统的信噪比,同时天线增益提高了。同时将完成的超材料样件放置于车辆天线前部,形成透镜天线效果。
仿真与试验结果
4D 雷达结合 MiMO 天线技术,利用电磁超材料对毫米 波传输的精准有序调控,使雷达能够测量目标物体的 3D 坐标+1D 速度。
最终可满足全天候工作,长距离探测,立体空间扫描等功能,除具备传统毫米波雷达平面扫描功能外还可以实现 16 线激光雷达立体点云成像效果。
最终成品造价约为目前 8-16 线激光雷达的5-10%,并可在任何天气环境情况下工作,同时长距离扫描(》150m),车规级耐用度等方面均具有明显优势。
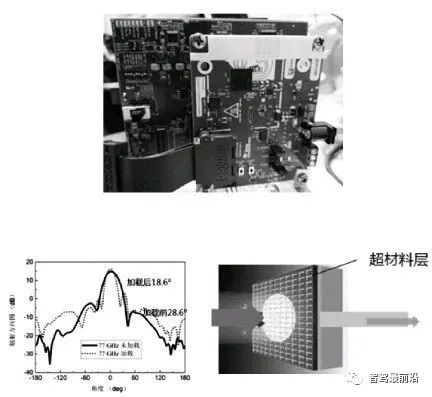
图4 加载超材料样机照片
核心技术特点:传统毫米波雷达天线提升波束质量,需增加天线等效口径尺寸。而现阶段同样口径天线,加载超材料后,波束宽度收窄 35%,有效提升了信噪比及输出环境点云图质量,同时可进行动态目标跟踪检测。
配套完成 4D 雷达成像软件开发,可实现 4D 点云成像每帧的信息传送同时还可搭配速度传感器等相关位置传感器,实现场景点云的建模。
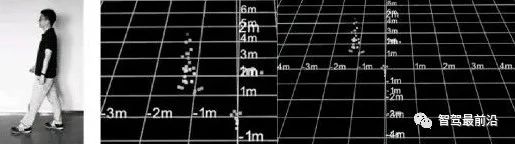
图5 4D雷达点云扫描示意图
车用智能驾驶辅助系统,在车载自动驾驶中占有非常重要的作用,同时车载毫米波雷达作为其中最重要的传感器之一,目前由于其全天候,低成本,多功能的优异性能越来越引起相关研发与应用部门的关注,同时将 2D 毫米波雷达扩展成为 3D 扫描毫米波雷达,以及将毫米波雷达进一步研发形成高分辨率毫米波雷达等相关研究方向越来越成为主流。本文中将毫米波雷达波束进一步优化,再进行 3D 数据扫描,实现毫米波雷达的多能应用。
审核编辑 :李倩
-
传感器
+关注
关注
2548文章
50660浏览量
751838 -
电磁波
+关注
关注
21文章
1437浏览量
53742 -
毫米波雷达
+关注
关注
106文章
1029浏览量
64233
原文标题:一文读懂毫米波立体成像雷达
文章出处:【微信号:Zidonjiashi,微信公众号:Zidonjiashi】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

毫米波雷达与超声波雷达的区别是什么
激光雷达VS毫米波雷达,一文读懂!

基于毫米波雷达的手势识别算法
一文带你了解毫米波雷达






 工商网监
工商网监
评论