 OpenHarmony基于润和Hi3516开发套件
OpenHarmony基于润和Hi3516开发套件
►
概述
我们将在Hi3516DV300 SDK的基础之上进行开发,分别为手部检测+手势识别实验,垃圾分类实验。手部检测+手势识别实验以及垃圾分类实验,主要基于训练好的wk模型在板端进行部署,并充分发挥海思IVE、NNIE硬件加速能力,完成AI推理和业务处理。
►
目录
ai_sample在Hi3516DV300 SDK基础上进行开发,在利用媒体通路的基础上,通过捕获VPSS帧进行预处理操作,并送至NNIE进行推理,结合AI CPU算子最终得到AI Flag并进行相应业务处理,该AI sample集成了垃圾分类、手势检测识别两个基础场景,运用到媒体理论、多线程、IPC通信、IVE、NNIE等思想,实现了一个轻量级sample,方便开发者了解taurus Hi3516DV300的AI能力,ai_sample目录结构如下:
//device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/ai_sample│ BUILD.gn # 编译ohos ai_sample需要的gn文件├─ai_infer_process # AI前处理、推理、后处理相关接口│ ├─ai_infer_process.c│ └─ai_infer_process.h├─dependency│ ├─audio_test.c│ └─audio_test.h├─ext_util # 常用的基础接口、可移植操作系统接口posix等│ ├─base_inteRFace.c│ ├─base_interface.h│ ├─misc_util.c│ ├─misc_util.h│ ├─posix_help.c│ └─posix_help.h├─mpp_help # 封装的媒体相关接口│ ├─include│ │ ├─ive_img.h│ │ └─vgs_img.h│ └─src│ ├─ive_img.c│ └─vgs_img.c├─scenario│ ├─cnn_trash_classify # 垃圾分类sample│ │ ├─cnn_trash_classify.c│ │ └─cnn_trash_classify.h│ └─hand_classify # 手部检测+手势识别sample│ ├─hand_classify.c│ ├─hand_classify.h│ ├─yolov2_hand_detect.c│ └─yolov2_hand_detect.h└─smp├─sample_ai_main.cpp├─sample_media_ai.c└─sample_media_ai.h
►
拷贝第三方库
步骤1:在源码的根目录下,分步执行下面的命令,拷贝第三方库至ai sample中
mkdir device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/ai_sample/third_party/src/ -pcp third_party/iniparser device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/ai_sample/third_party/src/ -rf

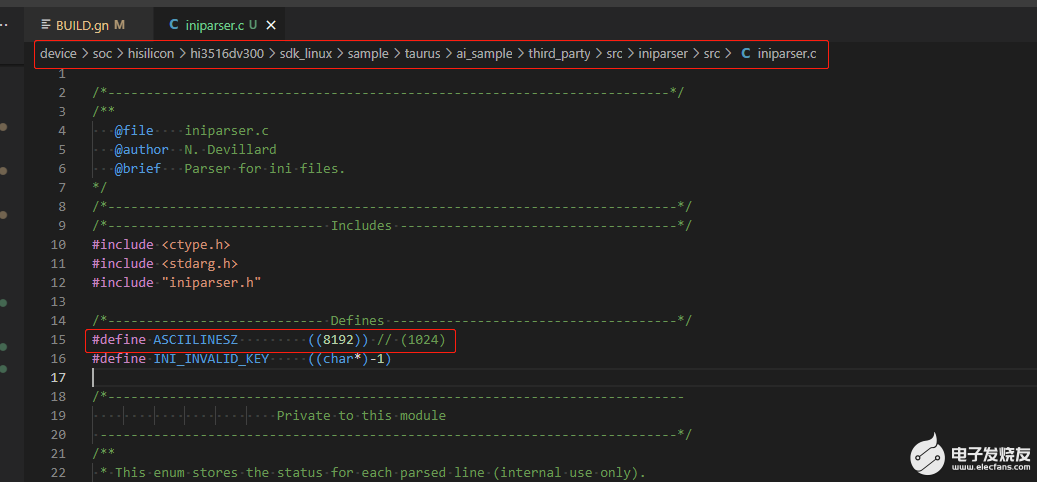
步骤2:使用IDE打开device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/ai_sample/third_party/src/iniparser/src/iniparser.c文件,把第15行的1024改成8192。
►
编译
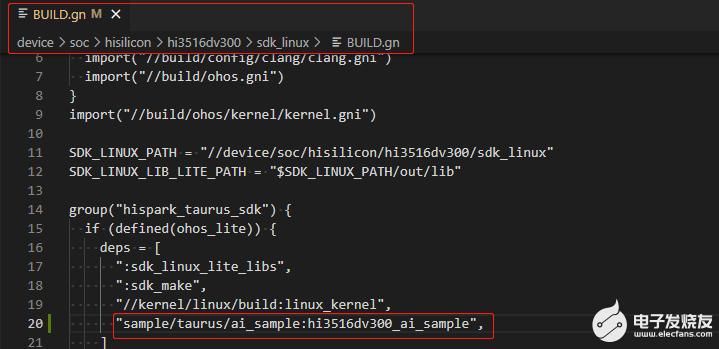
在编译ai_sample之前,需确保OpenHarmony 小型系统的主干代码已经整编通过,且已经按照《修改源码及配置文件适配Taurus开发板》的内容进行修改。在单编ai_sample之前,需修改目录下的一处依赖,进入//device/soc/hisilicon/hi3516dv300/sdk_linux目录下,通过修改BUILD.gn,在deps下面新增target,"sample/taurus/ai_sample:hi3516dv300_ai_sample",如下图所示:
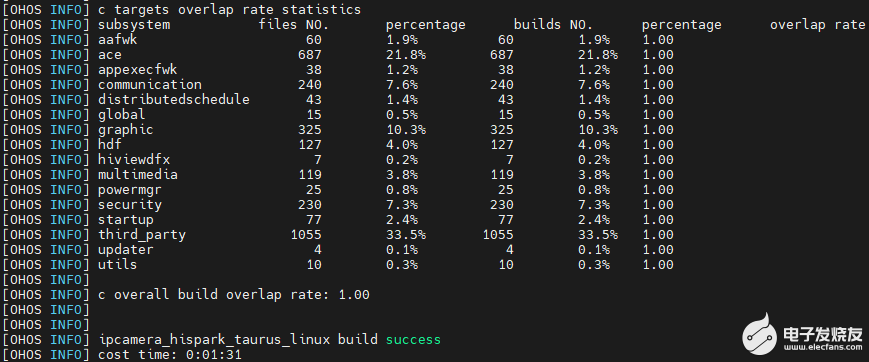
点击Deveco Device Tool工具的Build按键进行编译,具体的编译过程这里不再赘述,编译成功后,如下图所示:
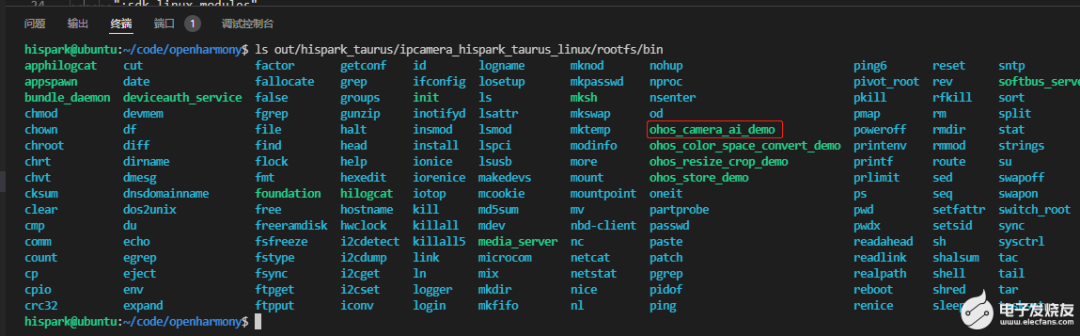
编译成功后,即可在out/hispark_taurus/ipcamera_hispark_taurus_linux/rootfs/bin目录下,生成 ohos_camera_ai_demo可执行文件,如下图所示:
►
拷贝可执行程序和依赖文件至开发板的mnt目录下
方式一:使用SD卡进行资料文件的拷贝
首先需要自己准备一张SD卡:
步骤1:将编译后生成的可执行文件拷贝到SD卡中。
步骤2:将devicesochisiliconhi3516dv300sdk_linuxoutlib目录下的libvb_server.so和 libmpp_vbs.so拷贝至SD卡中
步骤3:将device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/目录下的models文件夹和aac_file文件夹拷贝至SD卡中。(前提是按照《获取sample依赖的资源文件到本地》文档获取了资源文件)
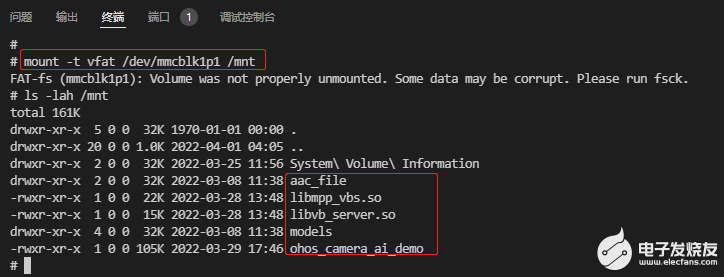
步骤4:可执行文件拷贝成功后,将内存卡插入开发板的SD卡槽中,可通过挂载的方式挂载到板端,可选择SD卡 mount指令进行挂载。
mount -t vfat /dev/mmcblk1p1 /mnt# 其中/dev/mmcblk1p1需要根据实际块设备号修改
挂载成功后,如下图所示:
方式二:使用NFS挂载的方式进行资料文件的拷贝
首先需要自己准备一根网线:
步骤1:参考博客链接中的内容,进行nfs的环境搭建;
步骤2:将编译后生成的可执行文件拷贝到Windows的nfs共享路径下;
步骤3:将devicesochisiliconhi3516dv300sdk_linuxoutlib目录下的libvb_server.so和 libmpp_vbs.so拷贝至Windows的nfs共享路径下;
步骤4:将device/soc/hisilicon/hi3516dv300/sdk_linux/sample/taurus/目录下的models文件夹和aac_file文件夹拷贝至Windows的nfs共享路径下(前提是按照《获取sample依赖的资源文件到本地》文档获取了资源文件)。
步骤5:依赖文件拷贝至Windows的nfs共享路径下后,执行下面的命令,将Windows的nfs共享路径挂载至开发板的mnt目录下
mount -o nolock,addr=192.168.200.1 -t nfs 192.168.200.1:/d/nfs /mnt
►
拷贝mnt目录下的文件至正确的目录下
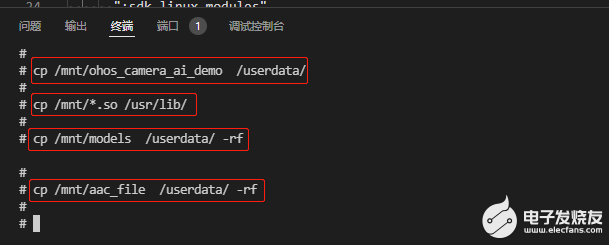
执行下面的命令,拷贝mnt目录下面的ohos_camera_ai_demo至userdata目录,拷贝mnt目录下面的libvb_server.so和 libmpp_vbs.so至/usr/lib/目录下,再将models和aac_file文件夹拷贝至userdata目录下
cp /mnt/ohos_camera_ai_demo /userdata/cp /mnt/*.so /usr/lib/cp /mnt/models /userdata/ -rfcp /mnt/aac_file /userdata/ -rf
执行下面的命令,给ohos_camera_ai_demo文件可执行权限
chmod 777 /userdata/ohos_camera_ai_demo
审核编辑 :李倩
-
cpu
+关注
关注
68文章
10854浏览量
211568 -
手势识别
+关注
关注
8文章
225浏览量
47786 -
图像识别
+关注
关注
9文章
520浏览量
38267
原文标题:OpenHarmony AI图像识别开发—基于润和Hi3516开发套件
文章出处:【微信号:HarmonyOS_Community,微信公众号:电子发烧友开源社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
鸿蒙OpenHarmony【基于Hi3516DV300开发板(时钟应用开发)】
鸿蒙OpenHarmony南向:【Hi3516标准系统入门(命令行方式)】

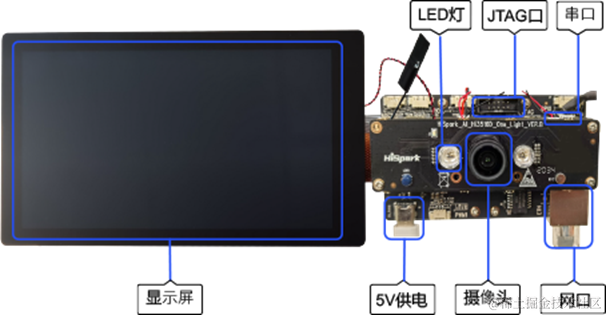
鸿蒙OpenHarmony南向:【Hi3516开发板介绍】
鸿蒙OpenHarmony【小型系统 烧录】(基于Hi3516开发板)
HarmonyOS开发:【基于命令行(开发环境)】

鸿蒙OpenHarmony【小型系统运行案例】 (基于Hi3516开发板)

鸿蒙OpenHarmony【小型系统编译】 (基于Hi3516开发板)
OpenHarmony开发实例:【电话簿联系人Contacts】
OpenHarmony开发实例:【 待办事项TodoList】

OpenHarmony鸿蒙南向开发案例:【智能猫眼(基于3516开发板)】
鸿蒙OpenHarmony【搭建Ubuntu环境】
鸿蒙OpenHarmony【搭建Windows环境】
OpenHarmony南向开发案例:【智能照相机】

OpenHarmony南向开发案例:【智能中控屏】





 工商网监
工商网监
评论