 图解目标检测算法的网络架构和基本流程
图解目标检测算法的网络架构和基本流程
YOLO v3 是目标检测各类算法中非常经典的一款,本文试着图解它的网络架构和基本流程,给想快速了解它的童鞋提供一些参考。
1引 言
近年来,由于在海量数据与计算力的加持下,深度学习对图像数据表现出强大的表示能力,成为了机器视觉的热点研究方向。图像的表示学习,或者让计算机理解图像是机器视觉的中心问题。
具体来说,图像理解包括分类、定位、检测与分割等单个或组合任务,如下图所示。
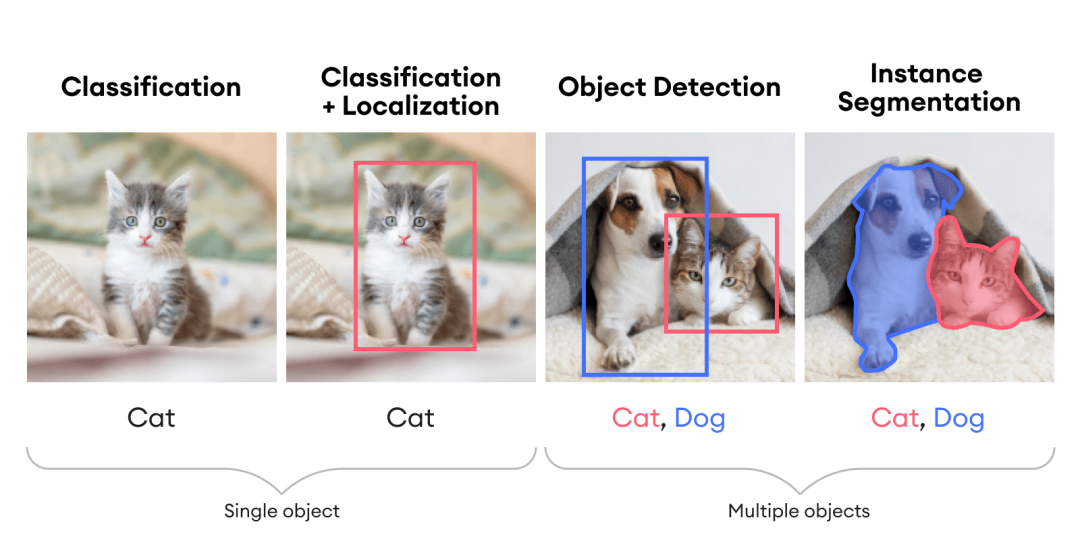
本篇关注目标检测,它可以认为是一个将分类和回归相结合的任务。
目标检测的核心问题可以简述为图像中什么位置有什么物体。
1)定位问题:目标出现在图像中哪个位置(区域)。
2)分类问题:图像的某个区域里的目标属于什么类别。
当然,目标(物体)在图像中还存在其他问题,如尺寸问题,即物体具有不同大小;还有形状问题,即物体在各种角度下可以呈现各种形状。
基于深度学习的目标检测算法目前主要分为两类:Two-stage和One-stage。
Tow-stage
先生成区域(region proposal,简称 RP),即一个可能包含待检物体的预选框,再通过卷积神经网络进行分类。
任务流程:特征提取 --> 生成 RP --> 分类/定位回归。
常见Two-stage目标检测算法有:R-CNN、Fast R-CNN、Faster R-CNN、SPP-Net 和 R-FCN 等。
One-stage
直接用网络提取图像特征来预测物体位置和分类,因此不需要 RP。
任务流程:特征提取–> 分类/定位回归。
常见的One-stage目标检测算法有:YOLO 系列、SSD 和 RetinaNet 等。不过,为了得到最终目标的定位和分类,往往需要后处理。
本篇主要来看 YOLO 系列中的 v3 版本。
2基本原理
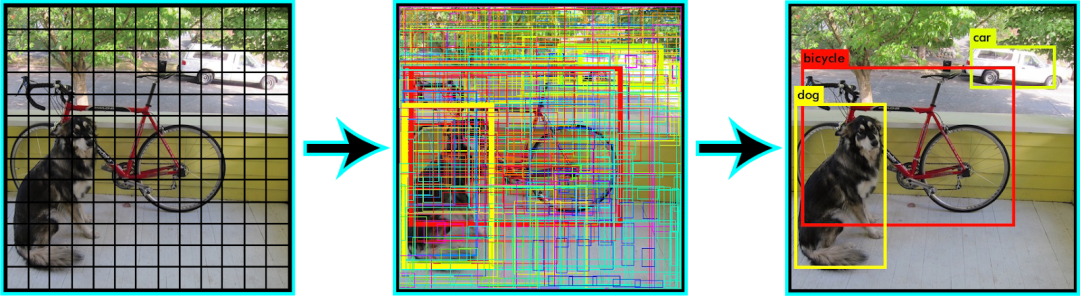
首先,我们先从整体上来看一下 YOLO v3 是如何工作的。YOLO v3 算法通过将图像划分为个网格(grid)单元来工作,每个网格单元具有相同大小的区域。这个网格单元中的每一个都负责对包含该网格的目标的检测和定位。
相应地,这些网格预测个相对于它们所在单元格的包围盒相对坐标,以及目标标签和目标出现在单元格中的概率。
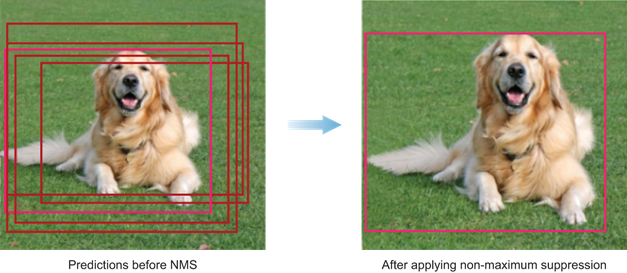
由于网格的分辨率比起原图来说已经大大降低,而检测和识别步骤都是针对网格单元来处理的,因此这个方案大大降低了计算量。但是,由于多个单元格用不同的包围盒来预测同一个对象,因此会带来了很多重复的预测框。YOLO v3 使用非最大值抑制(Non-Maximum Suppression,NMS)来处理这个问题。
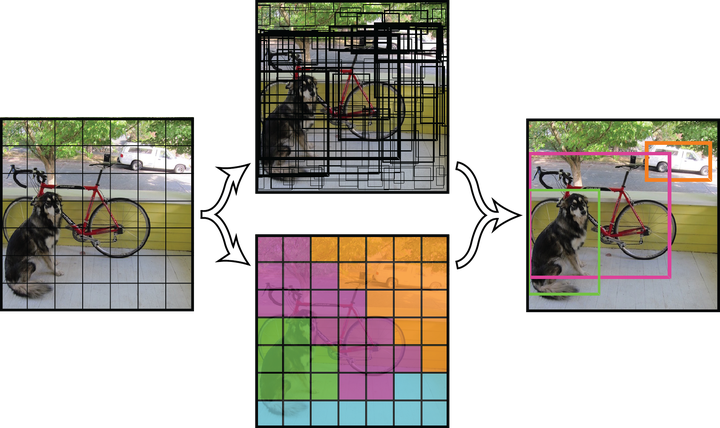
下图给出了一个例子,展示了当时的个网格以及由此检测图中目标的大致流程。会涉及很多个包围盒,最后选出三个包围盒来定位和识别目标。
另外,为了兼顾图像中各种尺度的目标,可以使用多个不同分辨率的个网格。很快将会看到,YOLO v3 中使用了 3 个尺度。
3总体架构
先看一下网络架构,注意它有三个不同分辨率的输出分支。
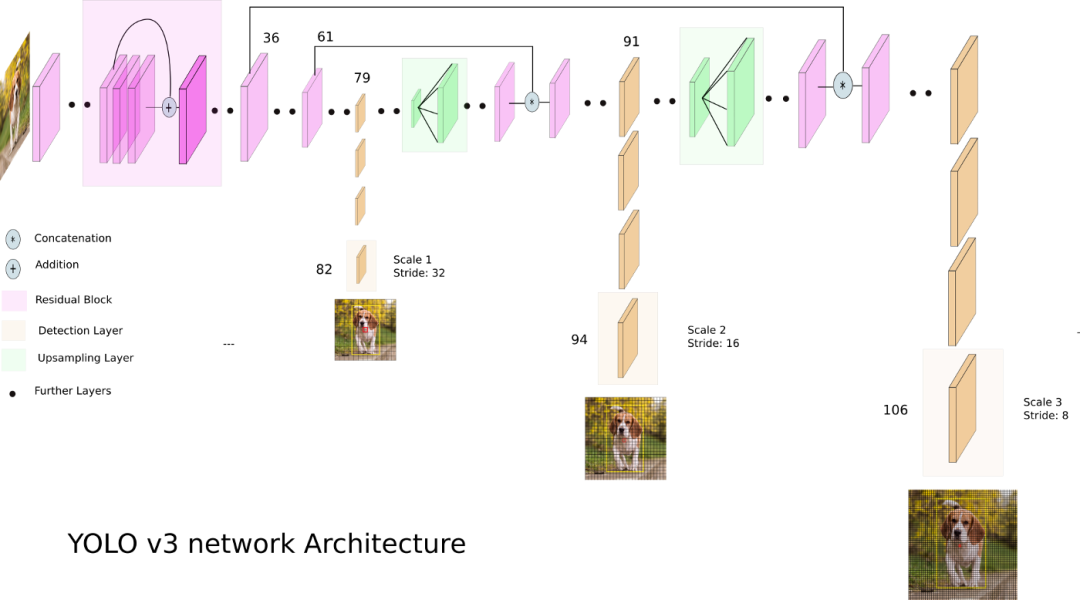
从 Yolo v3 的流程图可以看到,总共有 106 层,实现了对每张图像在大、中、小三个尺度上检测目标。这个网格有三个出口,分别是 82 层、94 层、106 层。
下面看一下更加详细的网络架构图,注意有三个检测结果(Detection Result)。
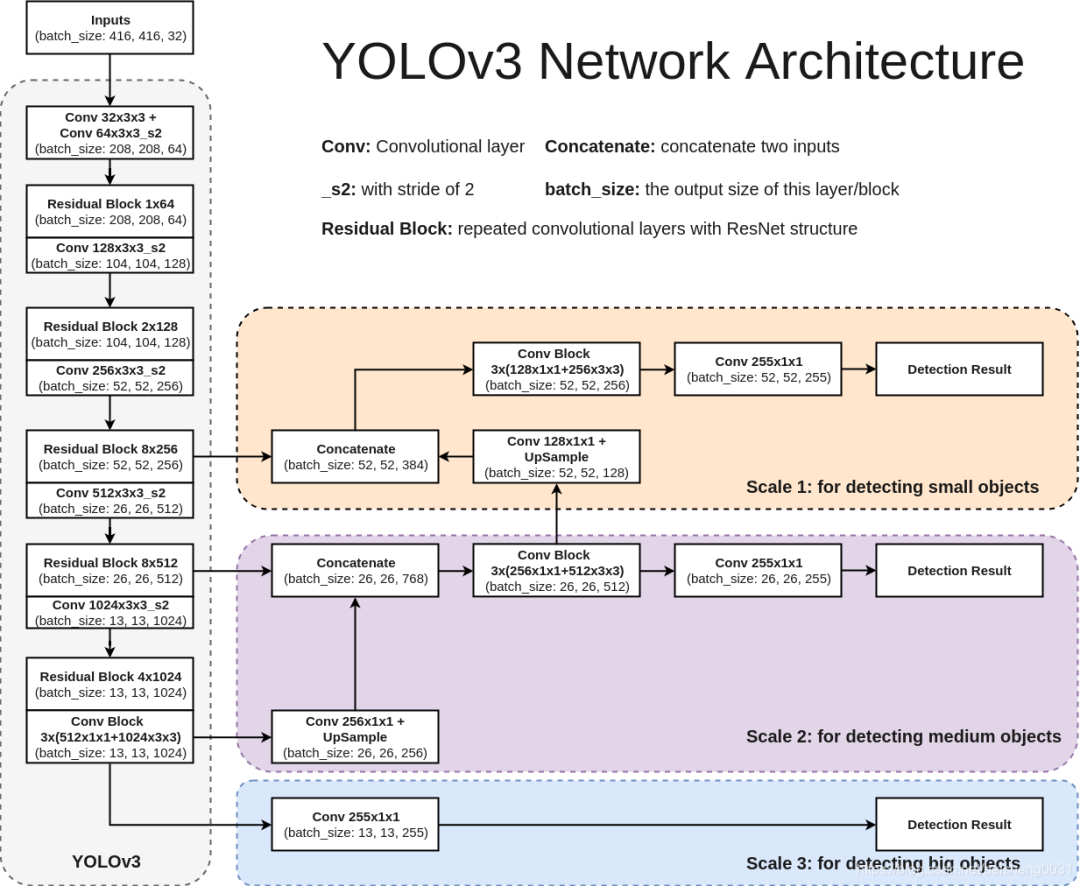
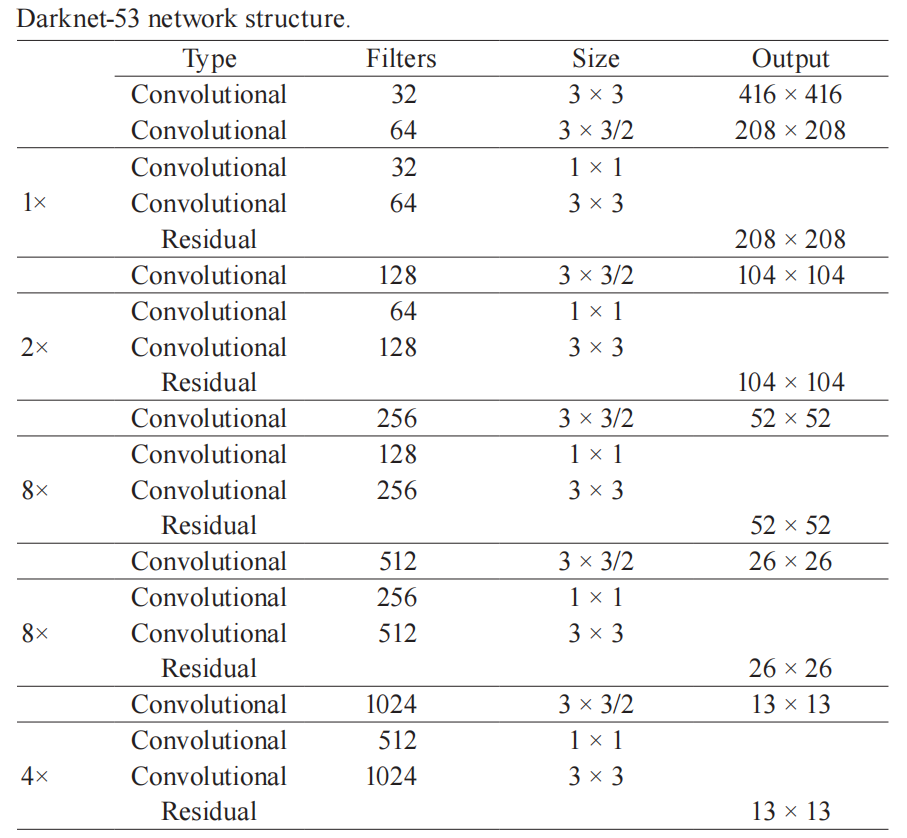
上图左边是 DarkNet-53,是一个深度为 53 层的卷积神经网络,具体的残差块和卷积层如下图所示。
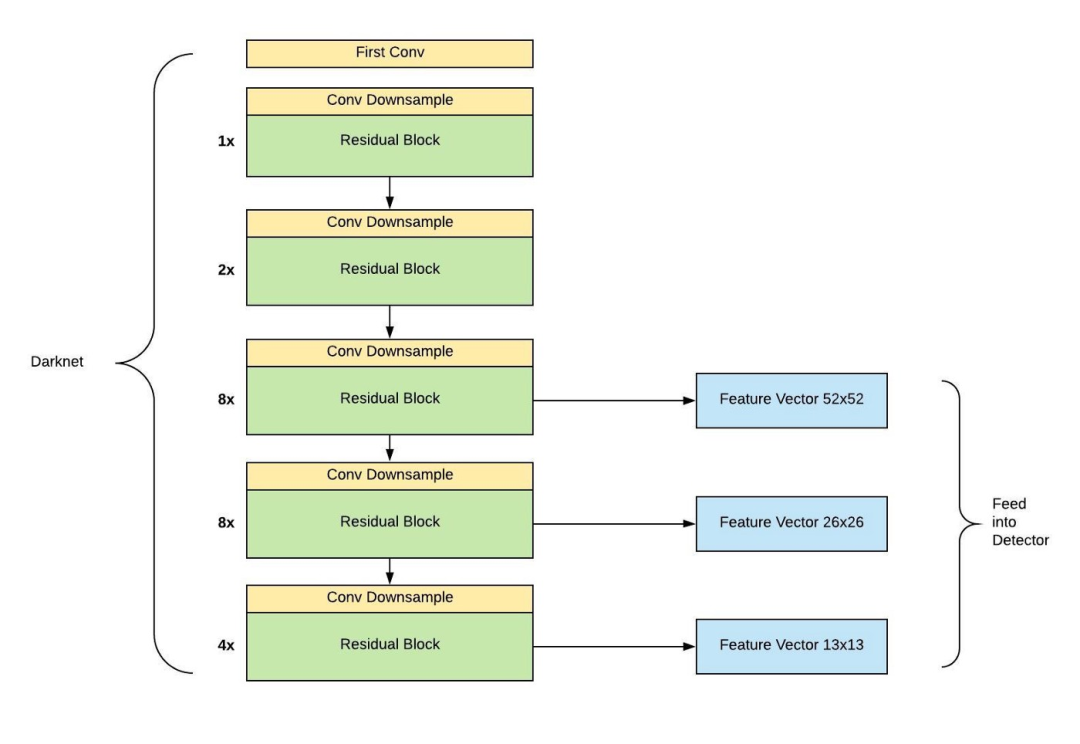
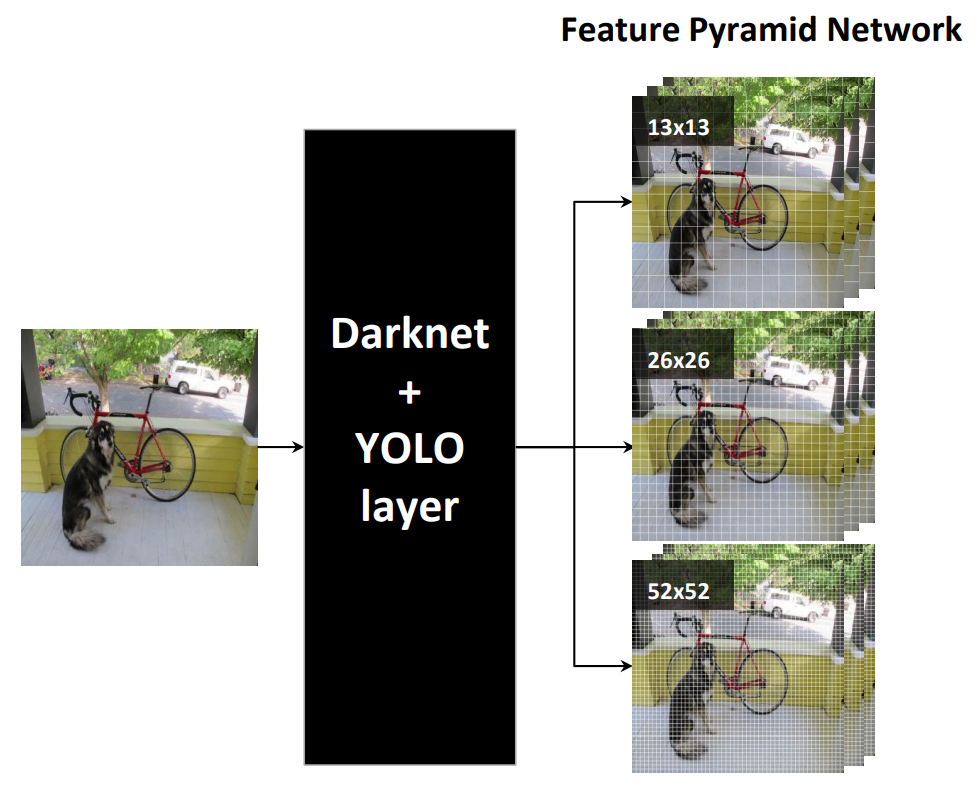
输入图像通过 Darknet 得到三个尺度的特征图,从上往下为(52×52×256), (26×26×512), (13×13×1024),也就是在三种尺度上进行以便检测到不同大小的目标。也可以结合下面这个更加精炼图来理解。
4关键步骤
目标检测也可以看作是对图像中的背景和前景作某种理解分析,即从图像背景中分离出感兴趣的目标,得到对于目标的描述<位置,类别>。
由于可能有多个目标存在,模型输出是一个列表,包含目标的位置以及目标的类别。目标位置一般用矩形检测框(包围盒)的中心和宽高来表示。
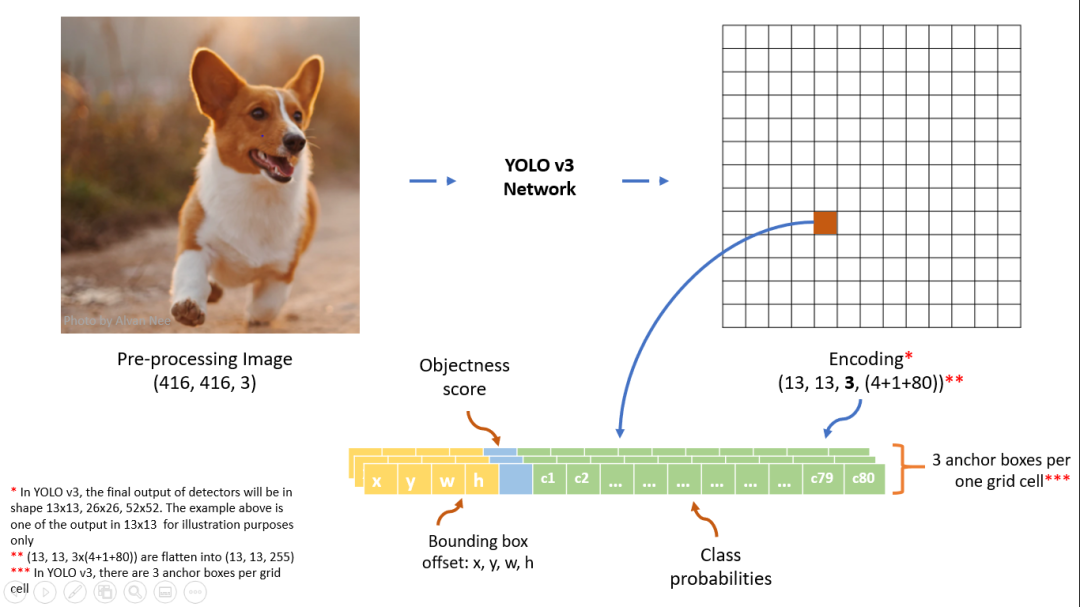
¸模型输出值
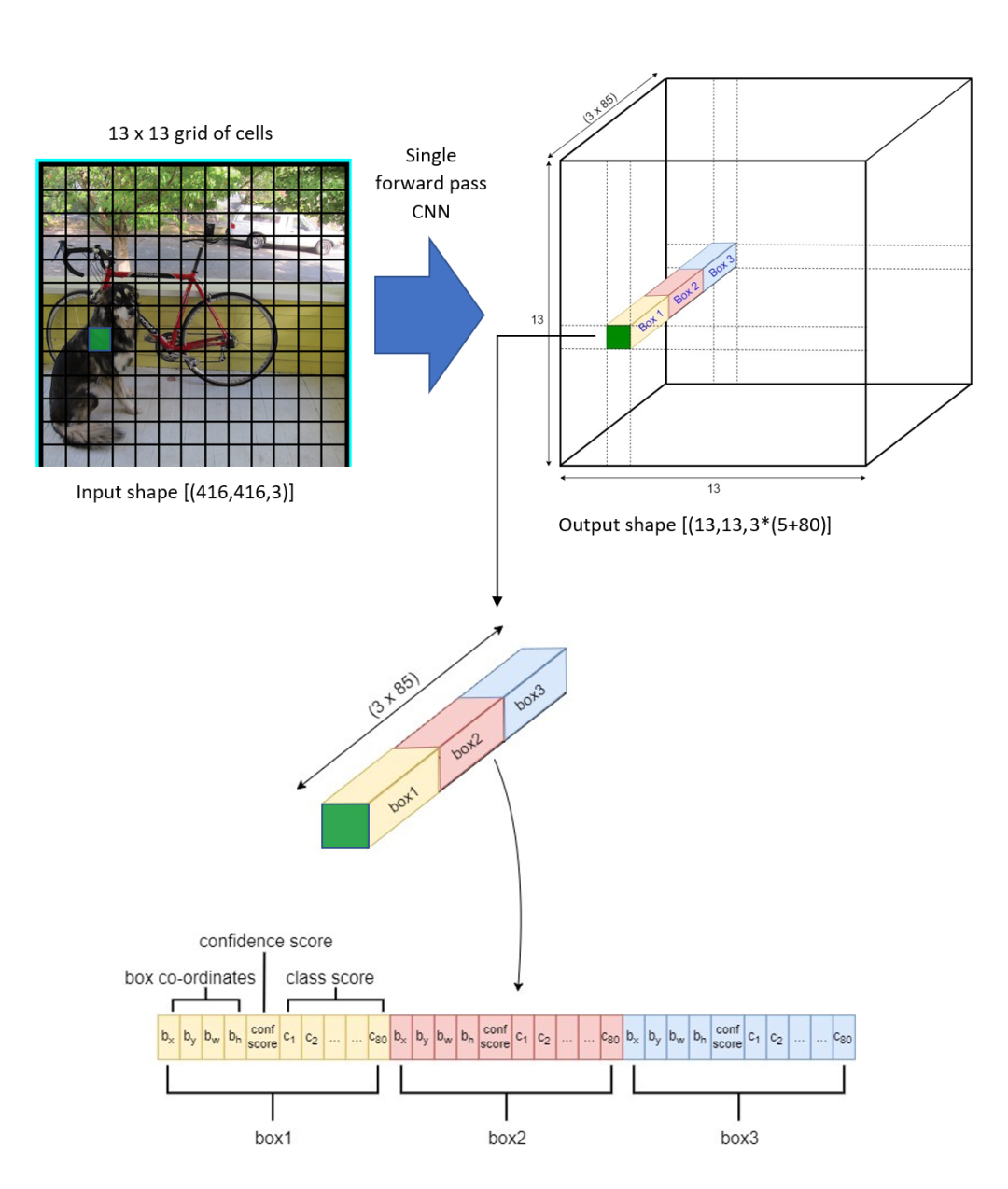
分辨率最低的输出分支对应的结果是,下图展示了在特征图上的检测结果,特征图上的一个像素对应一个网格,每个网格会有 3 个预测框,每个预测框具有(5 + C)个值,其中前 5 个数对应包围盒的位置以及属于目标的可能性,C 表示类别数。
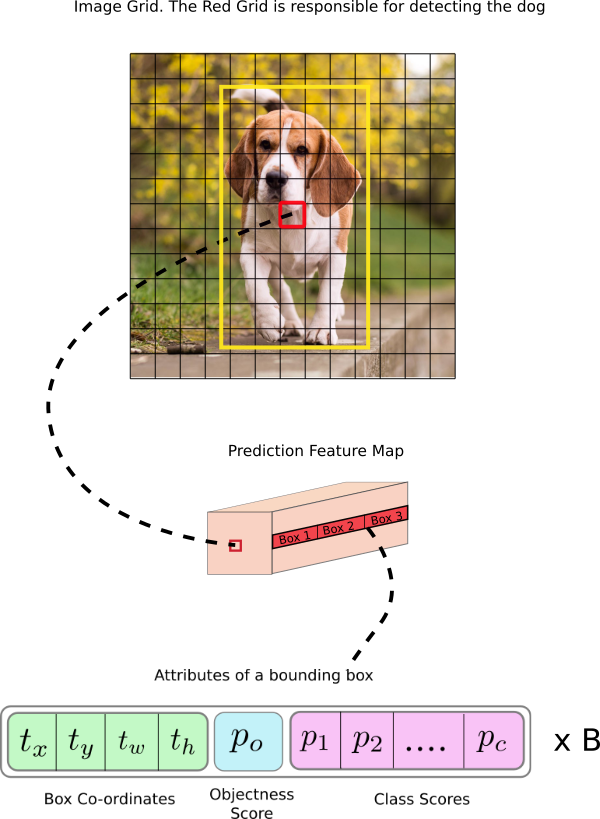
具体来看,最后输出的结果为:每个网格单元对应一个维向量,表示一个网格可以预测包围盒的数目,上面已经说了,个数值中的前个对应包围盒的中心位子和宽高值和个目标置信度。
这个结果的含义大致清楚了,但是还有个小问题,就是这个输出是根据什么信息计算而来呢?
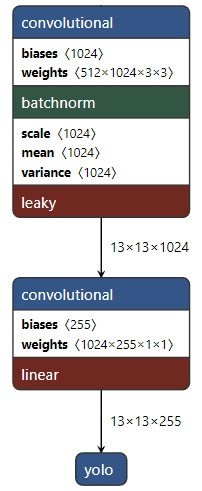
如下图所示,在前一层得到的特征图上再接一个核大小为的卷积层得到最终的输出,即由每个网点的特征向量(1024 维)转化为我们需要的输出,即包围盒、目标置信度以及类别信息。
上面说了,在这个尺度上会检测 3 个预测框,把它们拼接在一起,得到完整的结果示意图如下。
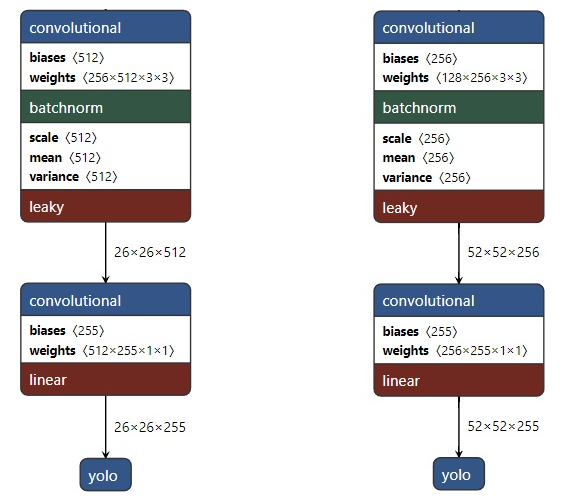
另外两个尺度上类似,它们对应的分支输出如下两个图所示。
网络会在 3 个尺度上分别检测,每个尺度上每个网格点都预设 3 个包围盒,所以整个网络共检测到13×13×3 + 26×26×3 + 52×52×3 = 10647个包围盒。
那么这里的 3 个预设包围盒又是怎么回事呢?
其实每个网格单元可以对目标的包围盒进行一定数量的猜测,比如下图中的示例,黄色网格单元进行两次包围盒(蓝色框)预测以定位人的位置。
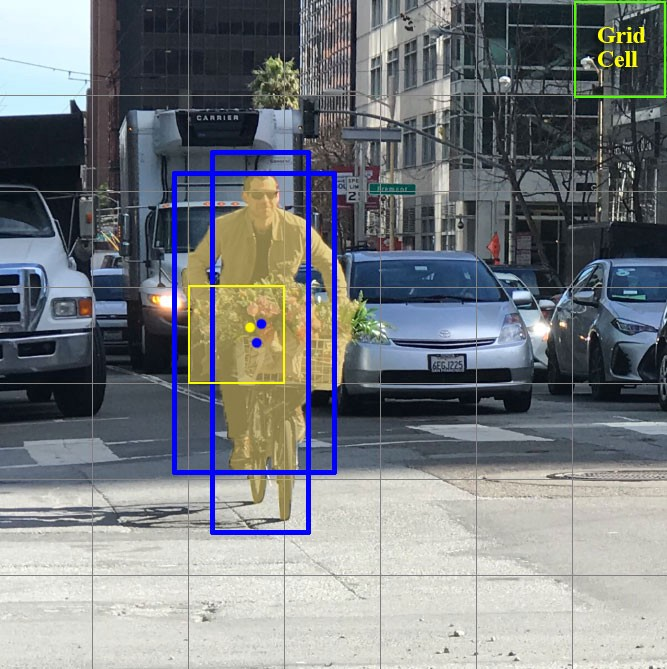
而 YOLO v3 中采用3 个预设包围盒,但值得注意的是这里限定只能检测同一个目标。
¸先验包围盒
还有一个问题,每个网格对应的包围盒怎么取呢?理论上,包围盒可以各种各样,但是这样的话就需要大量计算。
为了节省计算,不妨预先了解一下在图像中出现的目标一般具有怎么样的包围盒。可以通过在数据集 VOC 和 COCO 上使用聚类法寻找一般目标的包围盒尺寸。
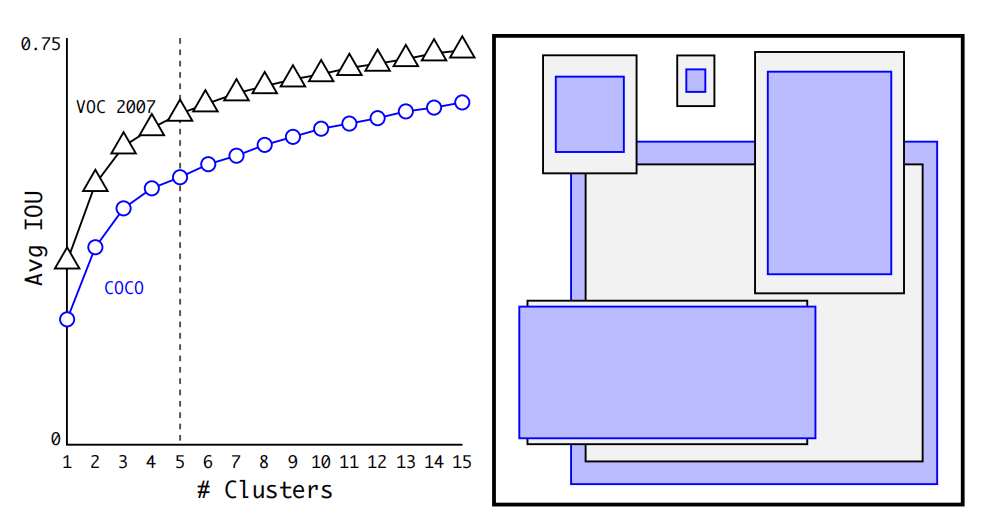
在包围盒的维度上运行 k-means 聚类,以获得良好先验。左图显示了我们在选择时得到的平均 IOU。在 YOLO v2 中,作者选择,此时在模型的召回率与复杂性之间具有较好的平衡。右图显示了 VOC 和 COCO 的相对质心。两组先验都倾向于更薄、更高的盒子,而 COCO 的尺寸变化比 VOC 更大。
而在 YOLO v3 中,通过聚类选出了个先验包围盒:(10×13),(16×30),(33×23),(30×61),(62×45),(59×119),(116×90),(156×198),(373×326)。
¸包围盒预测
有了预设的先验包围盒,怎么来计算实际包围盒呢?总不能直接套到每个网格单元处就完事了吧。
YOLO v3 引入一个机制,可以适当调整预设包围盒来生成实际的包围盒。下图中的公式将网络输出值转换得到实际的包围盒信息。
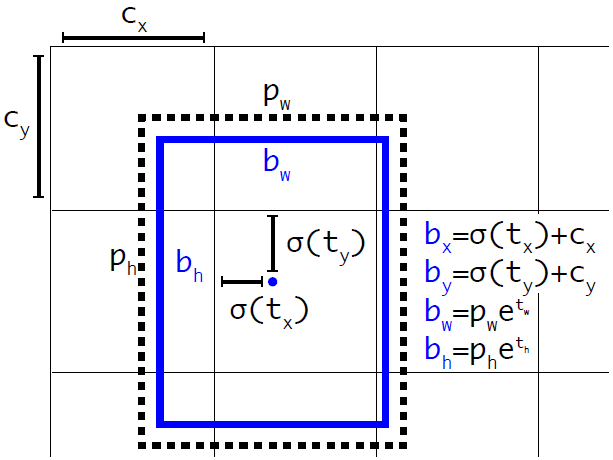
或者参考下图,
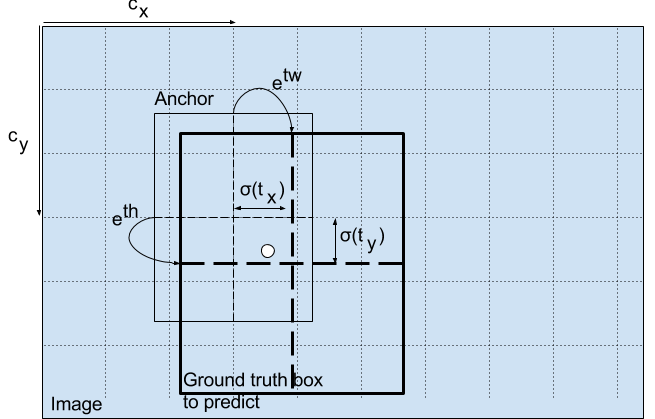
预测出包围盒中心点相对于网格单元左上角的相对坐标。通过和可以将包围盒中心点限制于网格单元内。另外,为了得到训练数据的值,只需要反算即可。
¸包围盒后处理
YOLO v3 模型的输出并没有直接给出包含目标的包围盒,而是包含所有网格单元对应结果的张量,因此需要一些后处理步骤来获得结果。
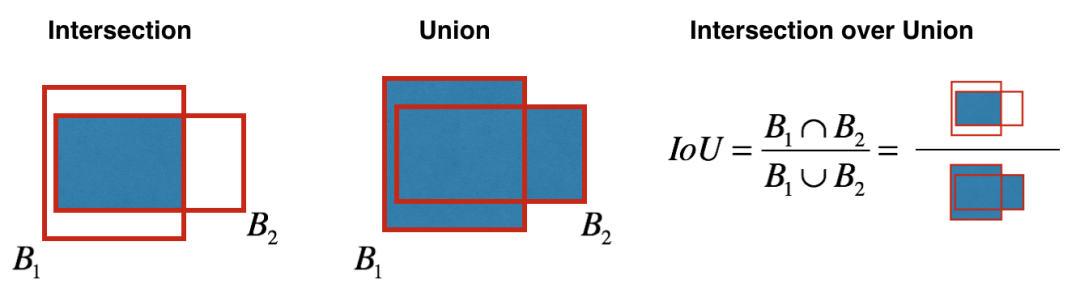
首先,需要根据阈值和模型输出的目标置信度来淘汰一大批包围盒。而剩下的包围盒中很可能有好几个围绕着同一个目标,因此还需要继续淘汰。这时候就要用到非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以认为求局部最优解。用在此处的基本思路就是选择目标置信度最大的包围盒,然后排除掉与之 IoU 大于某个阈值的附近包围盒。
而两个包围盒的 IoU 计算如下,
¸损失函数
由于网络的输出值比较多,因此损失函数也具有很多项,但总体还是清晰的,这里不作展开。
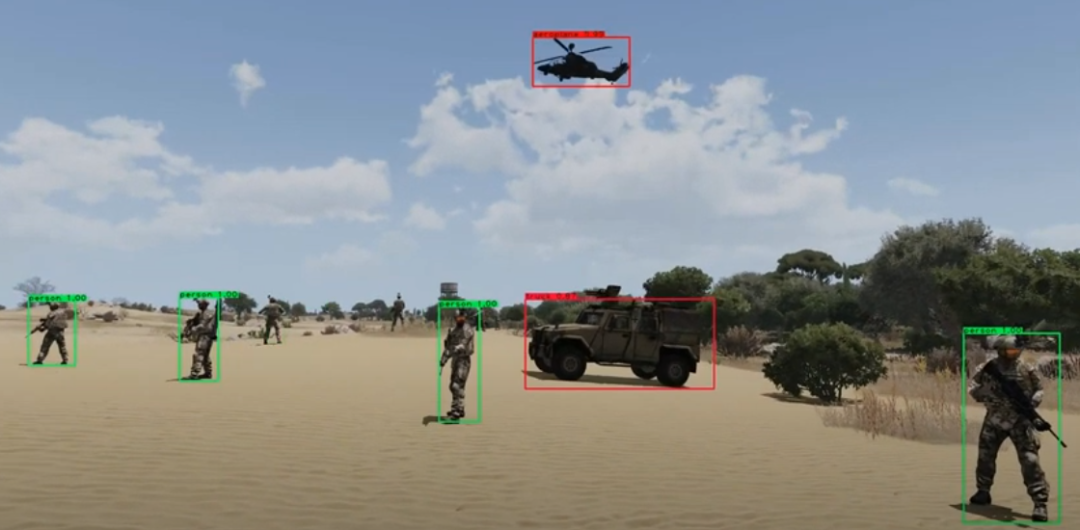
5实 验
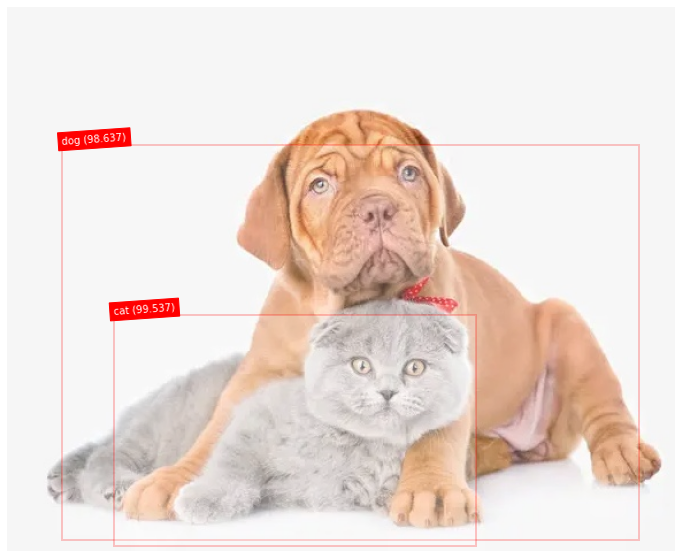
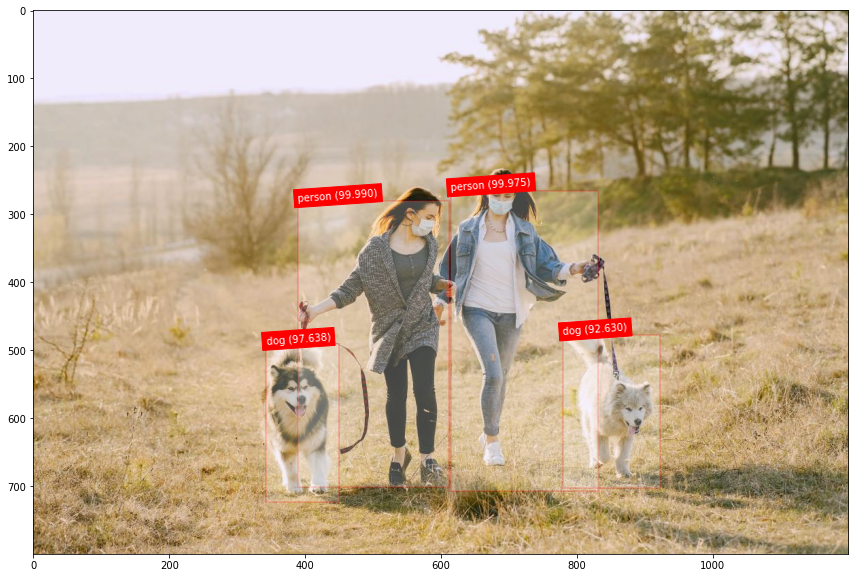
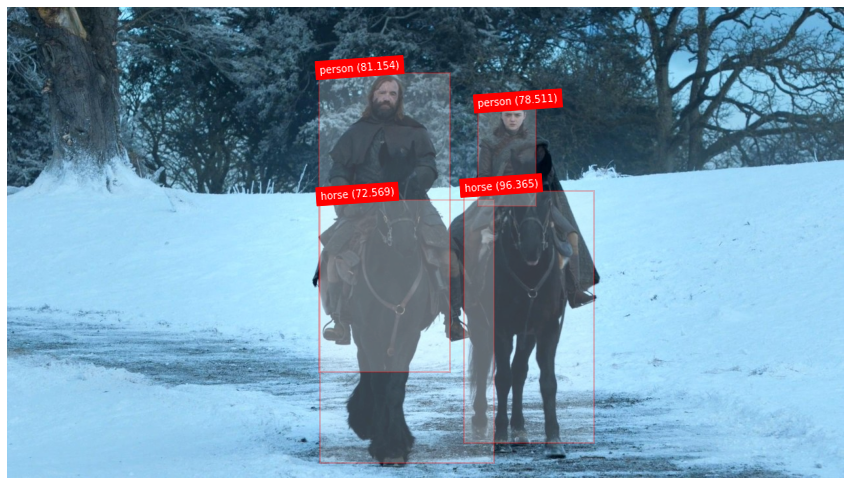
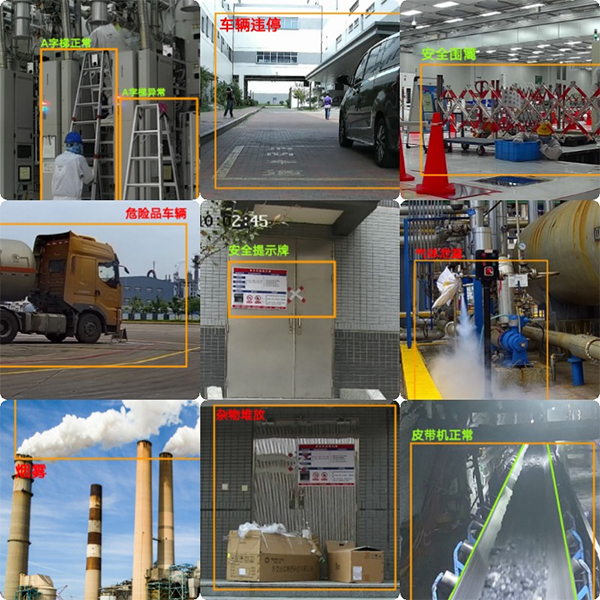
网上基于PyTorch[1]或者TF[2]等库的 YOLO v3 实现版本很多,可以直接拿来把玩。下面是网上随手下载的几个图像的测试结果,看着效果是不是还可以呢。

6小 结
先回顾下面这个图,看看是否了解每个步骤的含义。
然后再用一个图来总结一下流程,
接下来根据输出的目标置信度淘汰一大批包围盒,在使用非极大值抑制继续淘汰一批,最后剩下检测到的目标,下图是这些步骤的简化版本演示图。
参考代码
[1]
PyTorch 实现:https://github.com/eriklindernoren/PyTorch-YOLOv3
[2]
TensorFlow 实现:https://machinelearningmastery.com/how-to-perform-object-detection-with-yolov3-in-keras/
审核编辑 :李倩
-
检测算法
+关注
关注
0文章
119浏览量
25220 -
网络架构
+关注
关注
1文章
93浏览量
12588
原文标题:图解目标检测算法之 YOLO
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AI模型部署边缘设备的奇妙之旅:目标检测模型
如何制定一套优质的工业视觉检测算法方案?

在树莓派上部署YOLOv5进行动物目标检测的完整流程

RISC-V架构的目标和特点
旗晟机器人环境检测算法有哪些?
目标检测与识别技术有哪些
慧视小目标识别算法 解决目标检测中的老大难问题

BP神经网络算法的基本流程包括
口罩佩戴检测算法

人员跌倒识别检测算法

安全帽佩戴检测算法

咳嗽检测深度神经网络算法
OpenVINO™ C# API部署YOLOv9目标检测和实例分割模型






 工商网监
工商网监
评论