 简单实用的框架,可用于快速增加或修改IO配置
简单实用的框架,可用于快速增加或修改IO配置
在一个嵌入式系统中,可能存在许多输入或输出的IO口,输入有霍尔传感器、红外对管等,输出有LED、电源控制开关等。如果说硬件可以一次成型,那么随便一份代码都可以完成IO的配置工作,但研发阶段的产品,硬件各种修改是难免的,每一次 IO 的修改,对于底层开发人员来说,可能都是一次挑战。因为一旦有某一个 IO 配置错误,或者原来的配置没有修改正确(比如一个 IO 在原来的硬件适配中是输入,之后的硬件需要修改成输出),那么你很难查出来这是什么问题,因为这个时候不仅硬件修改了,软件也修改了,你需要先定位到底是软件问题还是硬件问题,所以一个好用的 IO 的配置框架就显得很有必要了。
有道友会说,不如使用 CubeMx 软件进行开发吧。
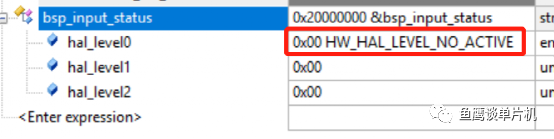
1、这个软件适用于 ST 单片机,以前还能用,现在,除非你家里有矿,不然谁用的起STM32?基本上都国产化了(虽然有些单片机号称兼容,但到底还是有些差异的)。2、公司原本的代码就是使用标准库,只是因为IO 的变化,你就需要把整个库换掉吗?时间上允许吗?你确定修改后不会出现大问题?3、国产化的芯片可没有所谓的标准库和HAL库供你选择,每一家都有各自的库,如果你的产品临时换方案怎么办?4、HAL 效率问题。今天鱼鹰介绍一个简单实用的框架,可用于快速增加或修改IO配置,甚至修改底层库。假设有3个 LED 作为输出、3 个霍尔传感器作为输入:输入配置代码:调试的时候,我们可以很方便的查看每个 IO 的状态是怎样的,而不用管 0 或 1 到底代表什么意思:#defineGPIOx_DefGPIO_TypeDef*#define GPIOMode_Def GPIOMode_TypeDeftypedef struct{GPIOx_Def gpio;uint16_t msk;GPIOMode_Def pull_up_down;} bsp_input_pin_def;#define _GPIO_PIN_INPUT(id, pull, gpiox, pinx) [id].gpio = (GPIOx_Def)gpiox, [id].msk = (1 << pinx), [id].pull_up_down = (GPIOMode_Def)pull#define GPIO_PIN_INPUT(id, pull, gpiox, pinx) _GPIO_PIN_INPUT(id, pull, gpiox, pinx)#define bsp_pin_get_port(gpiox) ((uint16_t)((GPIO_TypeDef *)gpiox)->IDR)#define bsp_pin_get_value(variable,id) do{ bsp_pin_get_port(bsp_input_pin[id].gpio) & bsp_input_pin[id].msk ? variable |= (1 << id) : 0;} while(0)typedef enum{PIN_INPUT_HALL_0 = 0, // 输入 IO 定义PIN_INPUT_HALL_1,PIN_INPUT_HALL_2,PIN_INPUT_MAX}bsp_pin_input_id_def;static const bsp_input_pin_def bsp_input_pin [PIN_INPUT_MAX] ={GPIO_PIN_INPUT(PIN_INPUT_HALL_0, BSP_GPIO_PUPD_NONE, GPIOA, 0),GPIO_PIN_INPUT(PIN_INPUT_HALL_1, BSP_GPIO_PUPD_NONE, GPIOB, 8),GPIO_PIN_INPUT(PIN_INPUT_HALL_2, BSP_GPIO_PUPD_NONE, GPIOE, 9),};// 单个 IO 初始化函数void bsp_pin_init_input(GPIOx_Def gpiox, uint32_t msk, GPIOMode_TypeDef pull_up_down){uint32_t temp;assert_param((msk & 0xffff0000) == 0 && gpiox != 0);temp = ((uint32_t) gpiox - (uint32_t) GPIOA) / ( (uint32_t) GPIOB - (uint32_t) GPIOA);/* enable the led clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA << temp, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = (GPIOMode_Def)pull_up_down;GPIO_InitStruct.GPIO_Pin = msk;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init((GPIO_TypeDef*)gpiox, &GPIO_InitStruct);}// 所有 IO 初始化void gpio_input_init(){bsp_input_pin_def *info;info = (bsp_input_pin_def *)&bsp_input_pin;for(int i = 0; i < sizeof(bsp_input_pin)/sizeof(bsp_input_pin[0]); i++){bsp_pin_init_input(info->gpio, info->msk, info->pull_up_down);info++;}}// 最多支持 32 个 IO 输入uint32_t bsp_input_all(void){uint32_t temp = 0;bsp_pin_get_value(temp, PIN_INPUT_HALL_0);bsp_pin_get_value(temp, PIN_INPUT_HALL_1);bsp_pin_get_value(temp, PIN_INPUT_HALL_2);return temp;}// 读取单个 IO 状态uint32_t bsp_input_level(bsp_pin_input_id_def id){return (bsp_pin_get_port(bsp_input_pin[id].gpio) & bsp_input_pin[id].msk) ? 1 : 0;}typedef enum{HW_HAL_LEVEL_ACTIVE = 0, // 可直接修改为 0 或 1,另一个枚举值自动修改为相反值HW_HAL_LEVEL_NO_ACTIVE = !HW_HAL_LEVEL_ACTIVE,}hw_input_hal_status_def;typedef struct{hw_input_hal_status_def hal_level0;uint8_t hal_level1;uint8_t hal_level2;}bsp_input_status_def;bsp_input_status_def bsp_input_status;int main(void){USRAT_Init(9600);//必须,进入调试模式后点击全速运行gpio_input_init();while(1){uint32_t temp = bsp_input_all();bsp_input_status.hal_level0 = (hw_input_hal_status_def)((temp >> PIN_INPUT_HALL_0) & 1);bsp_input_status.hal_level1 = ((temp >> PIN_INPUT_HALL_1) & 1);bsp_input_status.hal_level2 = ((temp >> PIN_INPUT_HALL_2) & 1);}}
 输出配置代码:
输出配置代码:这个框架有啥好处呢?1、自动完成 GPIO 的时钟初始化工作,也就是说你只需要修改引脚即可,不必关心时钟配置,但对于特殊引脚(比如PB3),还是得另外配置才行。2、应用和底层具体 IO 分离,这样一旦修改了 IO,应用代码不需要进行任何修改。3、增加或删减 IO 变得很简单,增加 IO时,首先加入对应枚举,然后就可以添加对应的 IO 了。删除 IO时,只要屏蔽对应枚举值和引脚即可。4、参数检查功能, IO 删除时,因为屏蔽了对应的枚举,所以编译时可以帮你发现问题,而增加 IO 时,它可以帮你在运行时检查该 IO是否进行配置了,可以防止因为失误导致的问题。#define GPIOx_Def GPIO_TypeDef*#define GPIOMode_Def GPIOMode_TypeDeftypedef struct{GPIOx_Def gpio;uint32_t msk;uint32_t init_value;} bsp_output_pin_def;#define _GPIO_PIN_OUT(id, gpiox, pinx, init) [id].gpio = gpiox, [id].msk = (1 << pinx), [id].init_value = init#define GPIO_PIN_OUT(id, gpiox, pinx, init) _GPIO_PIN_OUT(id, gpiox, pinx, init)#define _bsp_pin_output_set(gpiox, pin) (gpiox)->BSRR = pin#define bsp_pin_output_set(gpiox, pin) _bsp_pin_output_set(gpiox, pin)#define _bsp_pin_output_clr(gpiox, pin) (gpiox)->BRR = pin#define bsp_pin_output_clr(gpiox, pin) _bsp_pin_output_clr(gpiox, pin)typedef enum{PIN_OUTPUT_LED_G,PIN_OUTPUT_LED_R,PIN_OUTPUT_LED_B,PIN_OUTPUT_MAX}bsp_pin_output_id_def;static const bsp_output_pin_def bsp_output_pin [PIN_OUTPUT_MAX] ={GPIO_PIN_OUT(PIN_OUTPUT_LED_G, GPIOA, 0, 0),GPIO_PIN_OUT(PIN_OUTPUT_LED_R, GPIOF, 15, 0),GPIO_PIN_OUT(PIN_OUTPUT_LED_B, GPIOD, 10, 0),};void bsp_pin_init_output(GPIOx_Def gpiox, uint32_t msk, uint32_t init){uint32_t temp;assert_param((msk & 0xffff0000) == 0 && gpiox != 0);temp = ((uint32_t) gpiox - (uint32_t) GPIOA) / ( (uint32_t) GPIOB - (uint32_t) GPIOA);/* enable the led clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA << temp, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = (GPIOMode_Def)GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Pin = msk;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init((GPIO_TypeDef*)gpiox, &GPIO_InitStruct);if(init == 0){bsp_pin_output_clr(gpiox, msk);}else{bsp_pin_output_set(gpiox, msk);}}void bsp_output_init(){bsp_output_pin_def *info;info = (bsp_output_pin_def *)&bsp_output_pin;for(int i = 0; i < sizeof(bsp_output_pin)/sizeof(bsp_output_pin[0]); i++){bsp_pin_init_output(info->gpio, info->msk, info->init_value);info++;}}void bsp_output(bsp_pin_output_id_def id, uint32_t value){assert_param(id < PIN_OUTPUT_MAX);if(value == 0){bsp_pin_output_clr(bsp_output_pin[id].gpio, bsp_output_pin[id].msk);}else{bsp_pin_output_set(bsp_output_pin[id].gpio, bsp_output_pin[id].msk);}}int main(void){USRAT_Init(9600);//必须,进入调试模式后点击全速运行bsp_output_init();while(1){bsp_output(PIN_OUTPUT_LED_G, 1);bsp_output(PIN_OUTPUT_LED_B, 0);bsp_output(PIN_OUTPUT_LED_R, 1);}}
 5、更改库时可以很方便,只需要修改对应的宏即可,目前可以顺利在 GD32 和 STM32 库进行快速更换。6、对于输入 IO 而言,可以方便的修改有效和无效状态,防止硬件修改有效电平。对于输出 IO 而言,可以设定初始 IO 电平状态。7、代码简单高效,尽可能的复用代码,增加一个 IO 只需要很少的空间。8、缺点就是,只对同种配置的 IO 可以这样用。
5、更改库时可以很方便,只需要修改对应的宏即可,目前可以顺利在 GD32 和 STM32 库进行快速更换。6、对于输入 IO 而言,可以方便的修改有效和无效状态,防止硬件修改有效电平。对于输出 IO 而言,可以设定初始 IO 电平状态。7、代码简单高效,尽可能的复用代码,增加一个 IO 只需要很少的空间。8、缺点就是,只对同种配置的 IO 可以这样用。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6039文章
44583浏览量
636629 -
霍尔传感器
+关注
关注
27文章
726浏览量
63271
原文标题:简单实用IO输入输出框架
文章出处:【微信号:zhuyandz,微信公众号:FPGA之家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
华纳云监视Linux磁盘IO性能命令:iotop,iostat,vmstat,atop,dstat,ioping
。 top命令可用于查看CPU是否正在等待磁盘操作完成。“wa”度量标准显示IO等待,CPU等待IO完成所花费的时间(以百分比
io口和串口的区别 单片机有多少个io口
等。而串口,即串行通信接口(Serial Communication Interface),是一种数据通信方式,通过一条数据线按照顺序传送数据。IO口和串口在功能和用途上存在显著区别: 通信方式 : IO口 :实现简单的输入输出
【教程】比Modbus控制更简单!S7 200 SMART利用Profinet网关扩展IO
PLC自带IO方法控制扩展IO。一配置Profinet网关首先导入Profinet网关的GSD文件,用于STEP7-MicroWINSMART组态软件

单片机基本io功能调试过程
所使用的单片机型号以及需要调试的IO口。不同型号的单片机在IO口的配置和特性上可能有所不同。 查阅单片机手册 : 查阅单片机的手册或数据手册,了解I
单片机io口怎么配置成输出口
单片机IO口配置成输出口的过程通常涉及对单片机内部寄存器的操作。不同型号的单片机在寄存器配置和编程方式上可能有所不同,但基本原理是相似的。以下是一个通用的步骤,用于将单片机
NVIDIA推出全新深度学习框架fVDB
在 SIGGRAPH 上推出的全新深度学习框架可用于打造自动驾驶汽车、气候科学和智慧城市的 AI 就绪型虚拟表示。
bootstrap框架和vue框架的区别
Bootstrap和Vue都是目前非常流行的前端开发框架,它们各自具有独特的优势和特点。 设计理念 Bootstrap是一个基于HTML、CSS和JavaScript的前端开发框架,主要用于快
远程IO与分布式IO的区别
在工业自动化和控制系统设计中,远程IO(Input/Output)和分布式IO是两个重要的概念。它们各自具有独特的特点和优势,适用于不同的应用场景。本文将详细探讨远程IO与分布式
鸿蒙Ability Kit(程序框架服务)【应用启动框架AppStartup】
`AppStartup`提供了一种更加简单高效的初始化组件的方式,支持异步初始化组件加速应用的启动时间。使用启动框架应用开发者只需要分别为待初始化的组件实现`AppStartup`提供
暖通控制系统可用钡铼分布式IO系统BL207
可编程逻辑控制功能,可替代DDC部分功能。 BACnet/IP IO系统BL207提供双网口支持交换机级联功能,支持标准的BACnet/IP协议,也可用于接入BACnet/IP控制器,可适配江森、霍

自制测试框架(设置界面密码1)
(设置界面密码为1)
目前支持的指令如下:
1.没有任何编程基础的人快速实现简易自动化制作;
2.测试后可以直接把数据和结果直接写入到MES;
3.可持续增加新的功能及模块;
4.快速实现点
发表于 03-02 19:33
EtherCAT IO的接线方法和流程是怎样的?
EtherCAT IO的接线方法和流程是怎样的? EtherCAT是一种用于实时以太网通信的开放式通信协议,具有低延迟和高带宽的优势。 EtherCAT IO是EtherCAT网络中连接到IO





 工商网监
工商网监
评论