 基于STM32设计的健康检测设备(测温心率计步)
基于STM32设计的健康检测设备(测温心率计步)
1. 项目介绍
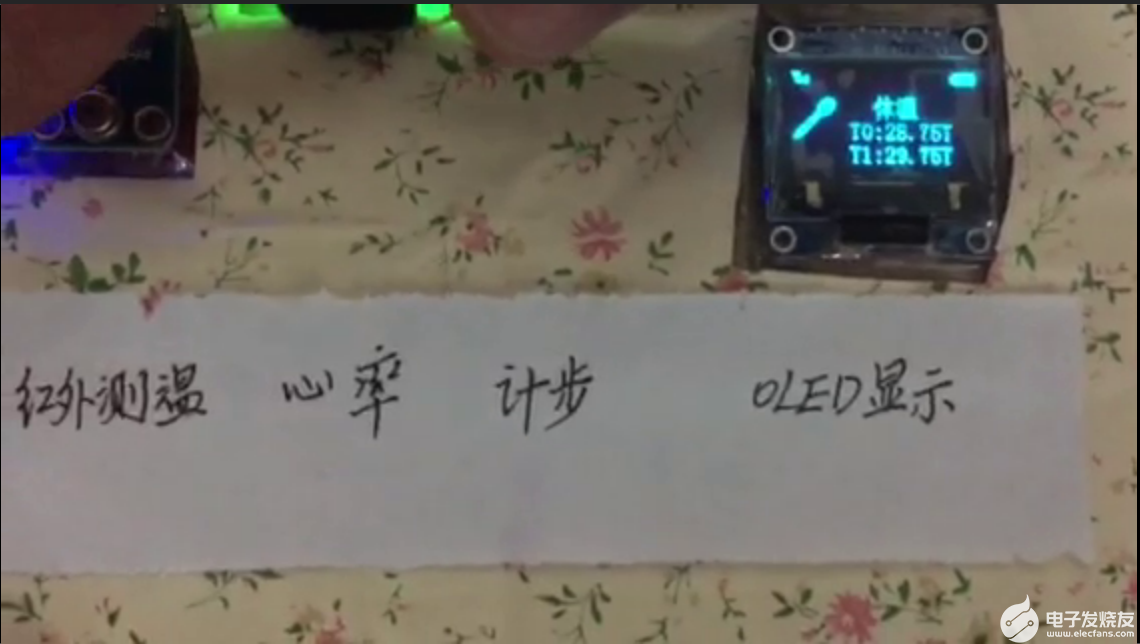
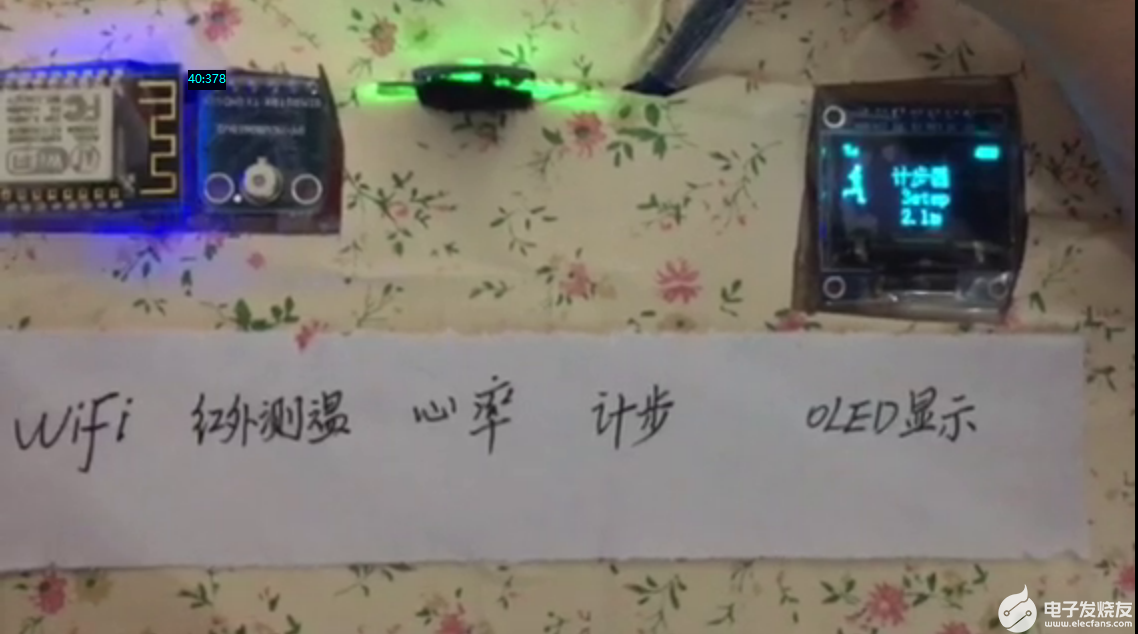
本文介绍的项目是基于STM32设计的健康检测设备,支持体温测量,心率检测,支持运动计步(采用MPU6050陀螺仪实现),支持WIFI传输数据到手机APP打印显示。
硬件环境介绍:
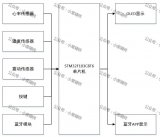
MCU采用STM32F103C8T6
体温检测传感器采用红外测温传感器
运动计步功能采用MPU6050陀螺仪实现
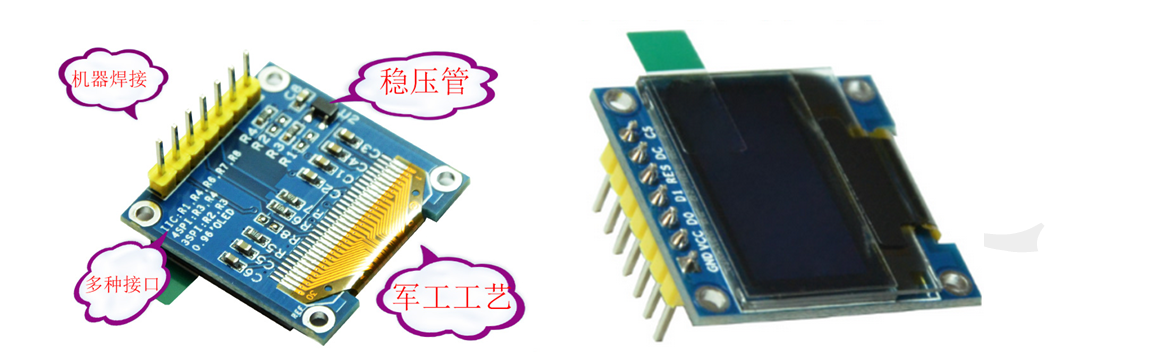
OLED显示屏采用0.96寸中景园电子的OLED显示屏-SPI接口
心率传感器:
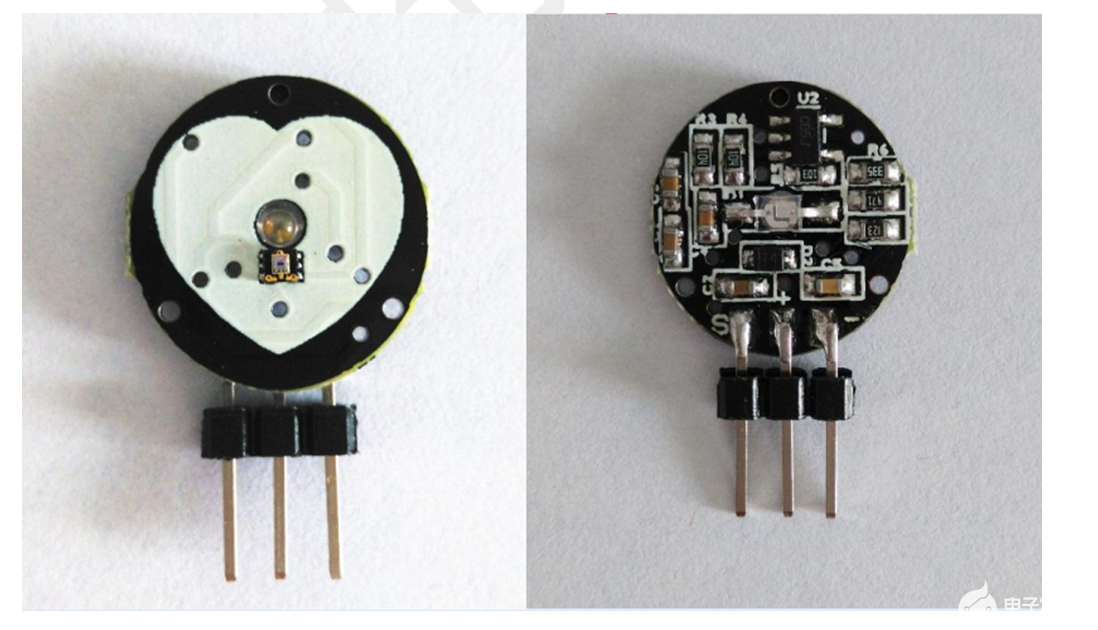
MPU6050传感器:

体温测温模块

OLED显示屏:
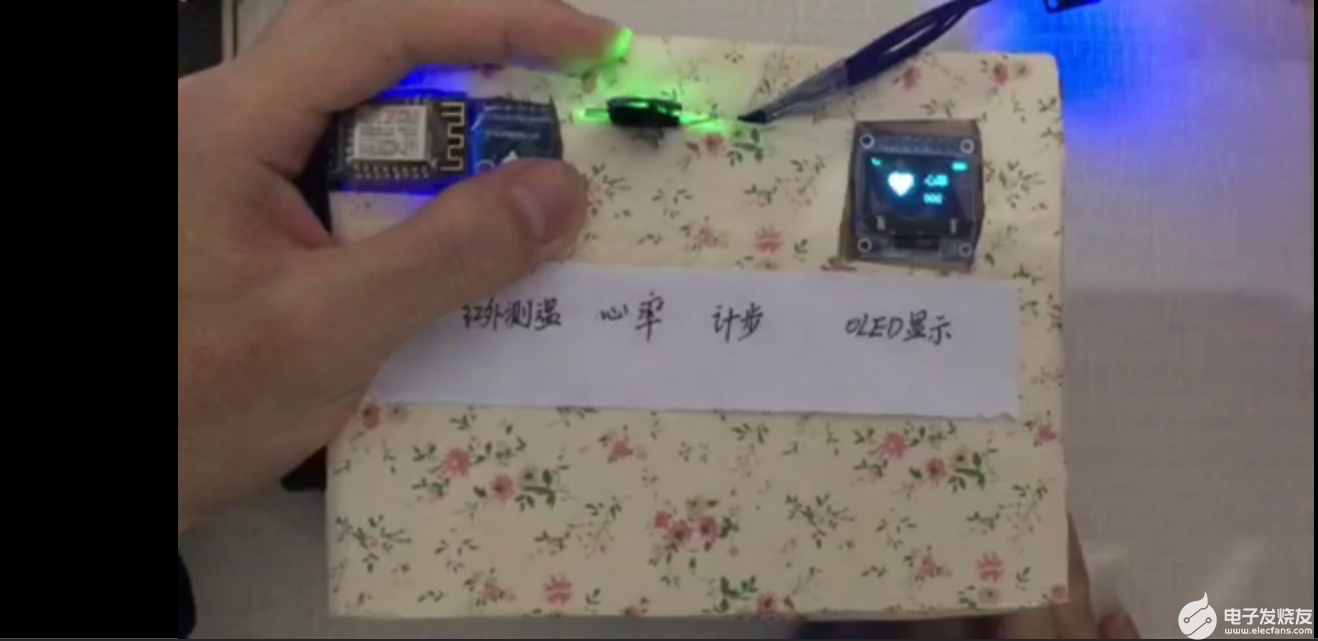
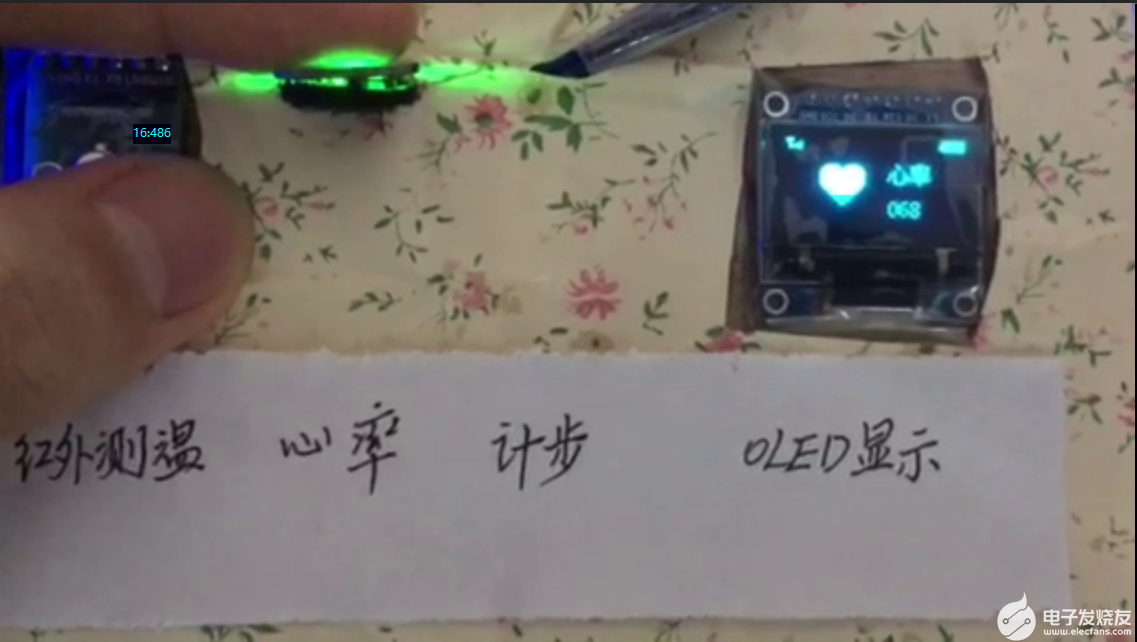
硬件效果图:
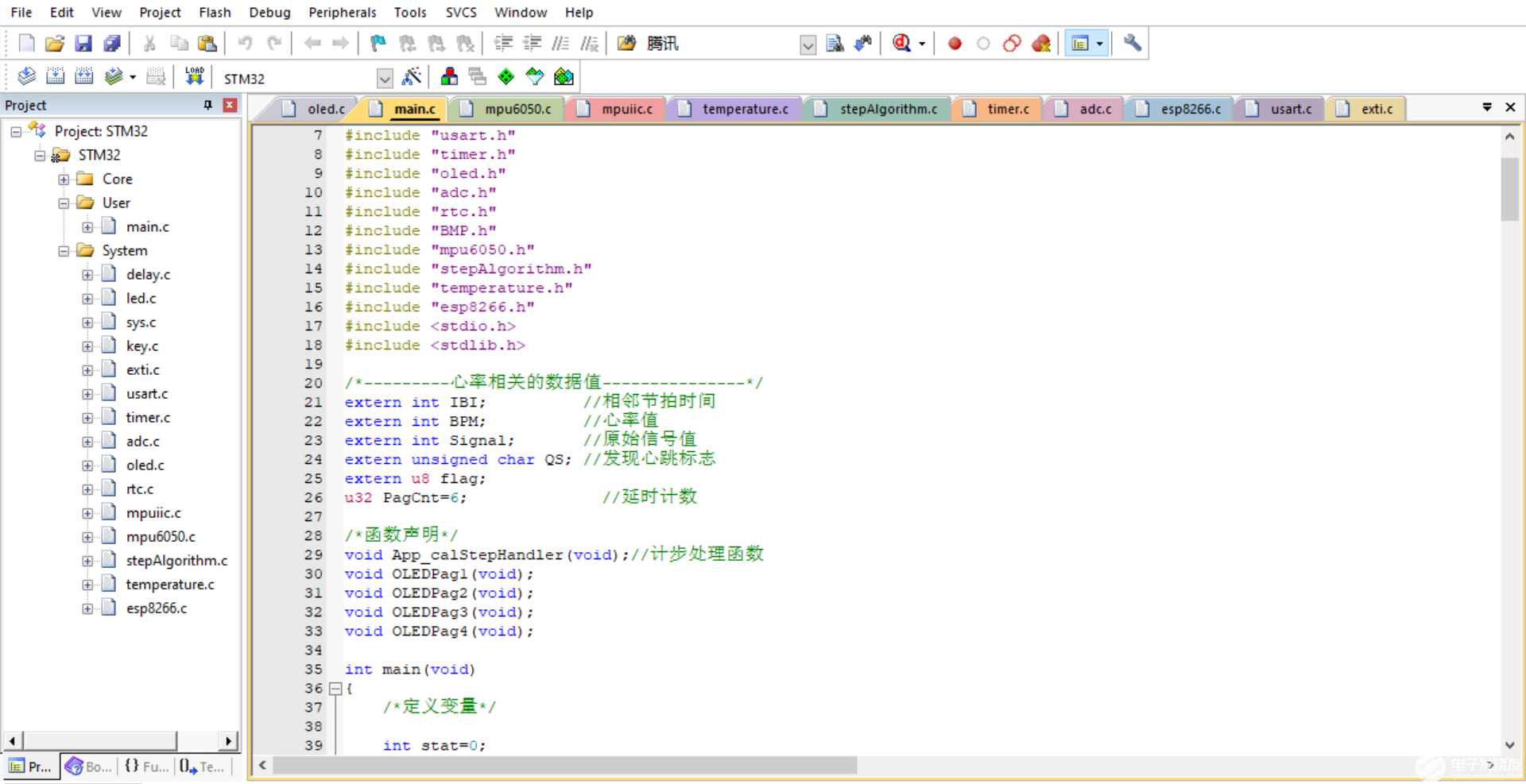
工程源码截图:
项目源码下载地址: https://download.csdn.net/download/xiaolong1126626497/63992839
视频演示地址: https://live.csdn.net/v/182607
2. 项目源码介绍
2.1 计步功能实现代码
计步功能是通过MPU6050陀螺仪测量计算得到,下面贴出计步算法的核心实现代码.
/*******************************************************************************
文件名: stepAlgorithm.c
描述 : 计步算法
*******************************************************************************/
#include "stepAlgorithm.h"
#include "rtc.h"
#include "math.h"
#include "mpu6050.h"
#define TRUE 1
#define FALSE 0
#define VALUE_NUM 4
sportsInfo_t userSportsInfo;
//存放三轴数据
float oriValues[3] = {0};
//用于存放计算阈值的波峰波谷差值
float tempValue[VALUE_NUM] ={0};
int tempCount = 0;
//是否上升的标志位
u8 isDirectionUp = FALSE;
//持续上升次数
int continueUpCount = 0;
//上一点的持续上升的次数,为了记录波峰的上升次数
int continueUpFormerCount = 0;
//上一点的状态,上升还是下降
u8 lastStatus = FALSE;
//波峰值
float peakOfWave = 0;
//波谷值
float valleyOfWave = 0;
//此次波峰的时间
long timeOfThisPeak = 0;
//上次波峰的时间
long timeOfLastPeak = 0;
//当前的时间
long timeOfNow = 0;
//当前传感器的值
float gravityNew = 0;
//上次传感器的值
float gravityOld = 0;
//动态阈值需要动态的数据,这个值用于这些动态数据的阈值
float initialValue = (float) 1.3;
//初始阈值
float ThreadValue = (float) 2.0;
//三轴轴值
accValue_t accValue;
//行走信息:卡路里、里程、步数
static sportsInfo_t sportsInfo;
//计步缓存
static u8 stepTempCount =0;
/*******************************************************************************
* 函数名:onSensorChanged
* 功能描述: G-Sensor工作后会一直调用这个函数对三轴数据进行平方和开根号的处理
* 调用DetectorNewStep检测步子
*
* 参数说明:
* 输入:
* pAccValue:G-sensor的原始数据
* timeStamp_p:动态时间戳
* 返回值说明:
* 修改记录:
*******************************************************************************/
sportsInfo_t *onSensorChanged(accValue_t *pAccValue,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
{
accValue_t *p = pAccValue;
personInfo_t *userInfo = personInfo;
timeStamp_t *time_p = timeStamp_p;
oriValues[0] = p->accX;
oriValues[1] = p->accY;
oriValues[2] = p->accZ;
//对三轴数据进行平方和开根号的处理
gravityNew = (float) sqrt(oriValues[0] * oriValues[0]+ oriValues[1] * oriValues[1] + oriValues[2] * oriValues[2]);
//检测步子
return DetectorNewStep(gravityNew,time_p,userInfo);
}
/*******************************************************************************
* 函数名:DetectorNewStep
* 功能描述:
* 步伐更新:如果检测到了波峰,并且符合时间差以及阈值的条件,则判定为1步
* 阀值更新:符合时间差条件,波峰波谷差值大于initialValue,则将该差值纳入阈值的计算中
* 参数说明:
输入:
values:经过处理的G-sensor数据
timeStamp_p:时间戳
* 返回值说明:
* 修改记录:sportsInfo_t *onSensorChanged(accValue_t *pAccValue,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
*******************************************************************************/
sportsInfo_t *DetectorNewStep(float values,timeStamp_t *timeStamp_p,personInfo_t * personInfo)
{
static u32 time_old;
personInfo_t *userInfo = personInfo;
static u32 step_per_2_second; //每两秒所走的步数
float step_lenth,walk_speed,walk_distance,Calories;//步长
u32 time_now;
timeStamp_t *time_p = timeStamp_p;
if (gravityOld == 0)
{
gravityOld = values;
}
else
{
if (DetectorPeak(values, gravityOld))//检测到波峰
{
timeOfLastPeak = timeOfThisPeak;//更新上次波峰的时间
//将时间戳转换为以毫秒ms为单位
time_now = timeOfNow = ((time_p->hour*60+time_p->minute)*60+time_p->second)*1000+time_p->twentyMsCount*20; //获取时间 ,并转化为毫秒
//如果检测到了波峰,并且符合时间差以及阈值的条件,则判定为1步
if ( (timeOfNow - timeOfLastPeak >= 250 )//Jahol Fan 修改为300,防止轻微动都也会检测步子
//&& (timeOfNow - timeOfLastPeak <= 2000)
&&(peakOfWave - valleyOfWave >= ThreadValue)
)
{
timeOfThisPeak = timeOfNow; //更新此次波峰时间
stepTempCount++;//Jahol:加1为两步
step_per_2_second ++;
//Jahol:这样计算卡路里,不能滤除人为的误操作,导致的结果是:里程和卡路里偏大
if((time_now - time_old) >= 2000 ) //如果时间过了2秒
{
if( 1 == step_per_2_second )
{
step_lenth = userInfo->height/5;
}
else if( 2 == step_per_2_second )
{
step_lenth = userInfo->height/4;
}
else if( 3 == step_per_2_second )
{
step_lenth = userInfo->height/3;
}
else if( 4 == step_per_2_second )
{
step_lenth = userInfo->height/2;
}
else if(5 == step_per_2_second) //Jahol:为了使计步准确,设置上限值为5步,牺牲卡路里准确性
{
step_lenth = userInfo->height/1.2f;
}
else if( 7 == step_per_2_second )
{
step_lenth = userInfo->height;
}
else if(step_per_2_second >= 8) // step_diff>8
{
step_lenth = userInfo->height*1.2f;
}
else
{
step_lenth = 0;
}
walk_speed = step_per_2_second*step_lenth/2; //速度 ,单位:米/秒
walk_distance = step_per_2_second*step_lenth; //行走距离,单位:米
Calories = 4.5f*walk_speed*(userInfo->weight/2)/1800; //Jahol:weight是以kg为单位
sportsInfo.calories += Calories;
sportsInfo.distance += walk_distance;
time_old = time_now; //更新时间
step_per_2_second = 0;
}
else
{
//do nothing
}
/*
* 处理无效运动:
* 1.连续记录5才开始计步
* 2.例如记录的步用户停住超过3秒,则前面的记录失效,下次从头开始
* 3.连续4记录了步用户还在运动,之前的数据才有效
* */
if ((stepTempCount< 5 )&&(timeOfNow - timeOfLastPeak >= 3000))
{
stepTempCount = 0;
}
else if((stepTempCount>= 5)&&(timeOfNow - timeOfLastPeak <= 3000))
{
sportsInfo.stepCount += stepTempCount;
stepTempCount = 0;
}
else
{
//do nothing
}
}
//Jahol:更新阀值,问题:阀值不会一直变大,不能变小?
if (timeOfNow - timeOfLastPeak >= 250
&& (peakOfWave - valleyOfWave >= initialValue))
{
timeOfThisPeak = timeOfNow;
ThreadValue = Peak_Valley_Thread(peakOfWave - valleyOfWave);//更新阀值
}
}
}
gravityOld = values;
return &sportsInfo;
}
/*******************************************************************************
* 函数名:DetectorPeak
* 功能描述:
*检测波峰 。以下四个条件判断为波峰:
*(1)目前点为下降的趋势:isDirectionUp为FALSE
*(2)之前的点为上升的趋势:lastStatus为TRUE
*(3)到波峰为止,持续上升大于等于2次
*(4)波峰值大于20 //Jahol:把这个值修改为15
*记录波谷值 :
*(1)观察波形图,可以发现在出现步子的地方,波谷的下一个就是波峰,有比较明显的特征以及差值
*(2)所以要记录每次的波谷值,为了和下次的波峰做对比
* 参数说明:
* 输入:
* newValue:最新的经过处理的G-sensor数据
* oldValue:前一个处理的G-sensor数据
* 返回值说明:
* 修改记录:
*******************************************************************************/
u8 DetectorPeak(float newValue, float oldValue)
{
lastStatus = isDirectionUp;
if (newValue >= oldValue) //采样数据呈上升趋势
{
isDirectionUp = TRUE;
continueUpCount++;
}
else //数据呈下降趋势
{
continueUpFormerCount = continueUpCount;
continueUpCount = 0;
isDirectionUp = FALSE;
}
if ((!isDirectionUp) && lastStatus
&& (continueUpFormerCount >= 2 || oldValue >= 20))
{
peakOfWave = oldValue;
return TRUE;
}
else if ((!lastStatus) && isDirectionUp)
{
valleyOfWave = oldValue;
return FALSE;
}
else
{
return FALSE;
}
}
/*******************************************************************************
* 函数名:Peak_Valley_Thread
* 功能描述:
* 阈值的计算
* 1.通过波峰波谷的差值计算阈值
* 2.记录4个值,存入tempValue[]数组中
* 3.在将数组传入函数averageValue中计算阈值
*
* 参数说明:
* 返回值说明:
* 修改记录:
*******************************************************************************/
float Peak_Valley_Thread(float value)
{
float tempThread = ThreadValue;
u8 i = 0;
if (tempCount < VALUE_NUM)
{
tempValue[tempCount] = value;
tempCount++;
}
else
{
tempThread = averageValue(tempValue, VALUE_NUM);//计算阀值
for ( i = 1;i < VALUE_NUM;i++)//线性移位更新
{
tempValue[i - 1] = tempValue[i];
}
tempValue[VALUE_NUM - 1] = value;
}
return tempThread;
}
/*******************************************************************************
* 函数名:averageValue
* 功能描述:
* 梯度化阈值
* 1.计算数组的均值
* 2.通过均值将阈值梯度化在一个范围里
*
* 参数说明:
* 返回值说明:
* 修改记录:
*******************************************************************************/
float averageValue(float value[], int n)
{
float ave = 0;
u8 i =0;
for ( i = 0; i < n; i++)
{
ave += value[i];//求和
}
ave = ave / VALUE_NUM;//求平均值
if (ave >= 8)
ave = (float) 4.3; //????
else if (ave >= 7 && ave < 8)
ave = (float) 3.3;
else if (ave >= 4 && ave < 7)
ave = (float) 2.3;
else if (ave >= 3 && ave < 4)
ave = (float) 2.0;
else
{
ave = (float) 1.3;
}
return ave;
}
personInfo_t user_info;
u8 WatchInfo_init(void)
{
WatchInfo_setUserInfo(170,134); //设置身高、体重用于计算卡路里消耗
return 0; //初始化成功返回0
}
/**********************************************************************************************************
* 函数名: WatchInfo_setUserInfo
* 功能描述: 设置手表使用者的个人信息
* 参数说明:
* 返回值说明:
* 修改记录:
**********************************************************************************************************/
u8 WatchInfo_setUserInfo(u8 height,u8 weight)
{
user_info.height = ((float)height)/100;
user_info.weight = ((float)weight)/2;
return 0;//成功 0
}
personInfo_t * WatchInfo_getUserInfo(u8 *error)
{
u8 err;
err = 0;//0表示获取成功
error = &err;
return &user_info;
}
2.2 ESP8266 WIFI模块
设备测量的数据最终通过WIFI传递给手机APP显示,下面列出ESP8266的核心代码。
#include "esp8266.h"
extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN字节
extern u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
extern vu16 USART3_RX_STA; //接收数据状态
///
//用户配置区
//连接端口号:8086,可自行修改为其他端口.
const u8 portnum[]="8089";
//WIFI STA模式,设置要去连接的路由器无线参数,请根据你自己的路由器设置,自行修改.
const u8 wifista_ssid[]="wbyq1"; //路由器SSID号
const u8 wifista_encryption[]="wpa2_aes"; //wpa/wpa2 aes加密方式
const u8 wifista_password[]="123456789"; //连接密码
//WIFI AP模式,模块对外的无线参数,可自行修改.
const u8 wifiap_ssid[]="Cortex_M3"; //对外SSID号
const u8 wifiap_encryption[]="wpawpa2_aes"; //wpa/wpa2 aes加密方式
const u8 wifiap_password[]="12345678"; //连接密码
/*
函数功能:向ESP82668266发送命令
函数参数:
cmd:发送的命令字符串
ack:期待的应答结果,如果为空,则表示不需要等待应答
waittime:等待时间(单位:10ms)
返 回 值:
0,发送成功(得到了期待的应答结果)
1,发送失败
*/
u8 ESP8266_SendCmd(u8 *cmd,u8 *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
UsartStringSend(USART3,cmd);//发送命令
if(ack&&waittime) //需要等待应答
{
while(--waittime) //等待倒计时
{
DelayMs(10);
if(USART3_RX_STA&0X8000)//接收到期待的应答结果
{
if(ESP8266_CheckCmd(ack))
{
res=0;
//printf("cmd->ack:%s,%s\r\n",cmd,(u8*)ack);
break;//得到有效数据
}
USART3_RX_STA=0;
}
}
if(waittime==0)res=1;
}
return res;
}
/*
函数功能:ESP8266发送命令后,检测接收到的应答
函数参数:str:期待的应答结果
返 回 值:0,没有得到期待的应答结果
其他,期待应答结果的位置(str的位置)
*/
u8* ESP8266_CheckCmd(u8 *str)
{
char *strx=0;
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符
strx=strstr((const char*)USART3_RX_BUF,(const char*)str); //查找是否应答成功
printf("RX=%s",USART3_RX_BUF);
}
return (u8*)strx;
}
/*
函数功能:向ESP8266发送指定数据
函数参数:
data:发送的数据(不需要添加回车)
ack:期待的应答结果,如果为空,则表示不需要等待应答
waittime:等待时间(单位:10ms)
返 回 值:0,发送成功(得到了期待的应答结果)luojian
*/
u8 ESP8266_SendData(u8 *data,u8 *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
UsartStringSend(USART3,data);//发送数据
if(ack&&waittime) //需要等待应答
{
while(--waittime) //等待倒计时
{
DelayMs(10);
if(USART3_RX_STA&0X8000)//接收到期待的应答结果
{
if(ESP8266_CheckCmd(ack))break;//得到有效数据
USART3_RX_STA=0;
}
}
if(waittime==0)res=1;
}
return res;
}
/*
函数功能:ESP8266退出透传模式
返 回 值:0,退出成功;
1,退出失败
*/
u8 ESP8266_QuitTrans(void)
{
while((USART3->SR&0X40)==0); //等待发送空
USART3->DR='+';
DelayMs(15); //大于串口组帧时间(10ms)
while((USART3->SR&0X40)==0); //等待发送空
USART3->DR='+';
DelayMs(15); //大于串口组帧时间(10ms)
while((USART3->SR&0X40)==0); //等待发送空
USART3->DR='+';
DelayMs(500); //等待500ms
return ESP8266_SendCmd("AT","OK",20);//退出透传判断.
}
/*
函数功能:获取ESP82668266模块的AP+STA连接状态
返 回 值:0,未连接;1,连接成功
*/
u8 ESP8266_ApStaCheck(void)
{
if(ESP8266_QuitTrans())return 0; //退出透传
ESP8266_SendCmd("AT+CIPSTATUS",":",50); //发送AT+CIPSTATUS指令,查询连接状态
if(ESP8266_CheckCmd("+CIPSTATUS:0")&&
ESP8266_CheckCmd("+CIPSTATUS:1")&&
ESP8266_CheckCmd("+CIPSTATUS:2")&&
ESP8266_CheckCmd("+CIPSTATUS:4"))
return 0;
else return 1;
}
/*
函数功能:获取ESP8266模块的连接状态
返 回 值:0,未连接;1,连接成功.
*/
u8 ESP8266_ConstaCheck(void)
{
u8 *p;
u8 res;
if(ESP8266_QuitTrans())return 0; //退出透传
ESP8266_SendCmd("AT+CIPSTATUS",":",50); //发送AT+CIPSTATUS指令,查询连接状态
p=ESP8266_CheckCmd("+CIPSTATUS:");
res=*p; //得到连接状态
return res;
}
/*
函数功能:获取ip地址
函数参数:ipbuf:ip地址输出缓存区
*/
void ESP8266_GetWanip(u8* ipbuf)
{
u8 *p,*p1;
if(ESP8266_SendCmd("AT+CIFSR\r\n","OK",50))//获取WAN IP地址失败
{
ipbuf[0]=0;
return;
}
p=ESP8266_CheckCmd(""");
p1=(u8*)strstr((const char*)(p+1),""");
*p1=0;
sprintf((char*)ipbuf,"%s",p+1);
}
/*
函数功能:将收到的AT指令应答数据返回给电脑串口
参 数:mode:0,不清零USART3_RX_STA;
1,清零USART3_RX_STA;
*/
void ESP8266_AtResponse(u8 mode)
{
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符
printf("%s",USART3_RX_BUF); //发送到串口
if(mode)USART3_RX_STA=0;
}
}
/*
函数功能:ESP8266 AP模式+TCP服务器模式测试
*/
void ESP8266_APorServer(void)
{
u8 p[100],key;
u8 ipbuf[20];
// u32 rlen=0; //接收长度
// u32 constate,t=0;
while(ESP8266_SendCmd("AT\r\n","OK",20))//检查WIFI模块是否在线
{
ESP8266_QuitTrans();//退出透传
ESP8266_SendCmd("AT+CIPMODE=0\r\n","OK",200); //关闭透传模式
printf("未检测到模块,正在尝试连接模块...\r\n");
DelayMs(800);
}
printf("ESP8266模块检测OK!\r\n");
while(ESP8266_SendCmd("ATE0\r\n","OK",20)); //关闭回显
printf("请用设备连接WIFI热点:%s,%s,%ss\r\n",(u8*)wifiap_ssid,(u8*)wifiap_encryption,(u8*)wifiap_password);
/*1. 设置WIFI AP模式 */
ESP8266_SendCmd("AT+CWMODE=2\r\n","OK",50);
/*2. 重启模块 */
ESP8266_SendCmd("AT+RST\r\n","OK",20);
/*3. 延时3S等待重启成功*/
DelayMs(1000);
DelayMs(1000);
DelayMs(1000);
/*5. 配置模块AP模式无线参数*/
sprintf((char*)p,"AT+CWSAP="%s","%s",1,4\r\n",wifiap_ssid,wifiap_password);
ESP8266_SendCmd(p,"OK",1000);
/*4. 设置多连接模式:0单连接,1多连接(服务器模式必须开启)*/
ESP8266_SendCmd("AT+CIPMUX=1\r\n","OK",20);
/*5. 开启Server模式(0,关闭;1,打开),端口号为portnum */
sprintf((char*)p,"AT+CIPSERVER=1,%s\r\n",(u8*)portnum);
ESP8266_SendCmd(p,"OK",50);
/*6. 获取当前模块的IP*/
ESP8266_GetWanip(ipbuf);//
printf("IP地址:%s 端口:%s",ipbuf,(u8*)portnum);
USART3_RX_STA=0; //清空串口的接收标志位
// while(1)
// {
// key=GetKeyVal(1);//退出测试
// if(key==1)
// {
// printf("退出测试!\r\n");
// ESP8266_QuitTrans(); //退出透传
// ESP8266_SendCmd("AT+CIPMODE=0","OK",20); //关闭透传模式
// break;
// }
// else if(key==2) //发送数据
// {
// ESP8266_SendCmd("AT+CIPSEND=0,12\r\n","OK",200); //设置发送数据长度为12个
// ESP8266_SendData("ESP8266测试!","OK",100); //发送指定长度的数据
// DelayMs(200);
// }
// t++;
// DelayMs(10);
// if(USART3_RX_STA&0X8000) //接收到一次数据了
// {
// rlen=USART3_RX_STA&0X7FFF; //得到本次接收到的数据长度
// USART3_RX_BUF[rlen]=0; //添加结束符
// printf("接收的数据: rlen=%d,%s",rlen,USART3_RX_BUF); //发送到串口
// USART3_RX_STA=0;
// if(constate!=3)t=1000; //状态为还未连接,立即更新连接状态
// else t=0; //状态为已经连接了,10秒后再检查
// }
// if(t==1000)//连续10秒钟没有收到任何数据,检查连接是不是还存在.
// {
constate=ESP8266_ConstaCheck();//得到连接状态
if(!constate)printf("连接失败!\r\n");
// t=0;
// }
// if((t%20)==0)LED2=!LED2;
// ESP8266_AtResponse(1);
// }
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
146文章
17141浏览量
351097 -
STM32
+关注
关注
2270文章
10897浏览量
355865 -
检测设备
+关注
关注
0文章
623浏览量
16760
发布评论请先 登录
相关推荐
基于低功耗蓝牙的心率带方案说明
`随着蓝牙技术联盟(Bluetooth SIG)宣布支持蓝牙4.0版本的蓝牙体温计和心率检测器产品的面市,由此开启了医疗和健身领域无线监测设备的新纪元。本产品集成
发表于 07-20 08:40
具有红外测温的便携式心率计
方案概述 方案概述:具有红外测温功能的便携式心率计,主要应用为人体服务的,能够方便快捷地测量人体的温度,也能够测量人体不同状态下的心率。使人们能够随时随地的知道自己的
发表于 11-14 19:25
心率检测仪的设计与实现:stm32视频教程分享 精选资料分享
心率检测仪的设计与实现:stm32视频教程分享 STM32系列是基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。 本项目主要讲述了通过心律传感器
发表于 08-03 07:24
如何去实现一种基于STM32的体温心率步数采集系统设计
百度网盘下载地址(943):点击下载实现功能如下:1) 通过重力加速度传感器ADXL345检测人的状态,计算出走路步数、走路距离和平均速度。2)通过心率传感器实时检测
发表于 02-21 07:38
智能手环软硬件方案(心率+计步+睡眠)
本方案运用蓝牙传输技术结合自主研发的抗干扰计步算法、自动识别睡眠算法、24小时实时动态心率监测算法,具有有心率监测、计
发表于 12-23 18:20
•634次下载
IP67心率计防水检测操作的具体流程是怎样的
。 一般情况下心率计如果遇水(雨雪天气或者溅起来的水)或者身体流汗过多,心率计会不起作用或者显示的心率不准确,因此大多心率计会做防水处理,然后可以通过
发表于 01-06 12:04
•1204次阅读
基于STM32实现的体温_心率_步数采集系统设计
百度网盘下载地址(943):点击下载实现功能如下:1) 通过重力加速度传感器ADXL345检测人的状态,计算出走路步数、走路距离和平均速度。2)通过心率传感器实时检测
发表于 12-24 19:35
•24次下载

测温扫陕西健康码设备哪家好?健康码识别终端设备怎么选择?
控的总体要求,就目前而言公共场所实行的验码测温、戴口罩、防聚集等防疫措施,这一系列防疫查验工作其实都可以通过测温扫陕西健康码设备来完成的。测温

基于STM32单片机的智能手环系统设计
本次智能手环的设计使用STM32单片机作为控制中心,通过心率传感器测量心率,通过DS18B20测温,通过振动传感器计
求一种基于STM32单片机的健康检测系统设计方案
本次健康检测系统的设计使用STM32单片机作为控制中心,通过DS18B20C测温,通过心率模块测量心率
发表于 08-27 10:31
•856次阅读







 工商网监
工商网监
评论