 zivid彩色相机的传感器和空间分辨率
zivid彩色相机的传感器和空间分辨率

视野 (FOV) – 采样网格
视野 (FOV)表示相机传感器看到的范围。它是二维相机在水平和垂直方向上对其世界的看法。是一个金字塔形状,称为截头锥体,从相机光学元件中的原点到距相机的给定(特定型号)最大距离。随着相机和它所观察的物体之间的距离增加,截锥体的底面积和体积也会增加。在给定距离处,成像传感器看到的场景的大小(例如,传感器的所有像素捕获的场景的大小)被该距离处的截头体区域覆盖。
Zivid 彩色 3D 相机的水平视野插图。
在 60x40x40cm 料仓的常规拣选应用中,显示了 Zivid Two 视场在 700 mm 和 1100 mm 的覆盖范围。
传感器分辨率
3D 相机的传感器分辨率取决于传感器中的像素数。这些代表采样位置的总数。因此,1920 x 1200 像素的网格提供了 230 万像素的分辨率采样网格。常规 2D 相机将为每个像素提供 RGB 值。3D 相机的不同之处在于它提供了 X、Y 和 Z 轴上的附加坐标信息,这些信息表示从 3D 相机内部的原点到您在空间中每个采样点处成像的物体表面的距离测量值。
增加传感器分辨率的效果图示,显示了 Zivid 高分辨率 3D 点云与相同场景的较低分辨率飞行时间 (TOF) 相机的对比。
空间分辨率
每个相机像素测量图像平面中的一个小正方形区域的光,该区域随着截锥体的延伸而扩展,并随着从相机到表面的距离的增加而变得更大。相应地,XY平面中的空间分辨率随着从相机到视野区域的距离的增加而增加。
由单个像素覆盖的这些正方形区域中的每一个都是给定距离处的空间分辨率。例如,在距离对象 1 米的工作距离处工作的 Zivid One+ 相机具有 0.375 毫米的空间分辨率。我们可以看到,给定距离处的空间分辨率值决定了可能的最小特征测量值。靠近时空间分辨率变小,显示更小的特征。移动得更远会增加空间分辨率,使最小的特征更难区分。因此,像素数、FOV 和工作距离决定了可从我们的点云中提取的最小特征。
不同距离的空间分辨率差异。
什么是深度分辨率呢?
空间分辨率相对容易理解,由传感器的物理像素和 FOV 决定,但是,以同样一致的方式谈论深度分辨率并不同样简单。从逻辑上讲,如果我们采用相同的方法,那么深度分辨率应该是我们在 Z 轴上可以分辨的最小距离,这与底层的测量原理和传感技术的基本限制有关。但这里有一个问题。
在存在所有不同噪声源的情况下,如何始终如一地定义传感技术的基本限制(例如,应该像某些文章中那样只包括散粒噪声)?因此,通常使用的是深度测量的总噪声水平,即所谓的“z 噪声”。但问题在于,在机器人自动化背景下谈论测量噪声时,重要的是完整的 3D 点云。因此,每个像素的测量都是在三个维度(X、Y 和 Z)中进行的,而不仅仅是深度测量 (Z)。可以理解的是,单独谈论 z 噪声是没有意义的。
因此,正确的做法,以及本文中描述的 Zivid 采用的方法如下:传感器分辨率为您提供 3D 测量的采样网格,并且对于每个采样位置,底层表面点都以全 3D 进行测量。测量变化,以及解析所有三个维度(X、Y 和 Z)细节的能力,然后由精度表示,欧几里得距离,在连续测量之间测量
审核编辑:汤梓红
-
传感器
+关注
关注
2577文章
55499浏览量
793909 -
3D
+关注
关注
9文章
3022浏览量
115561 -
相机
+关注
关注
5文章
1606浏览量
56027 -
分辨率
+关注
关注
2文章
1128浏览量
43400
发布评论请先 登录

黑白相机与彩色相机的成像优势分析以及常见的误区说明

DLP9500:高分辨率空间照明调制的理想之选
红外焦平面探测器的分辨率有哪些?高分辨率有哪些优势?

ADC分辨率与精度的区别是什么
工业相机成像基础:传感器和分辨率

镜头分辨率如何匹配工业相机的分辨率

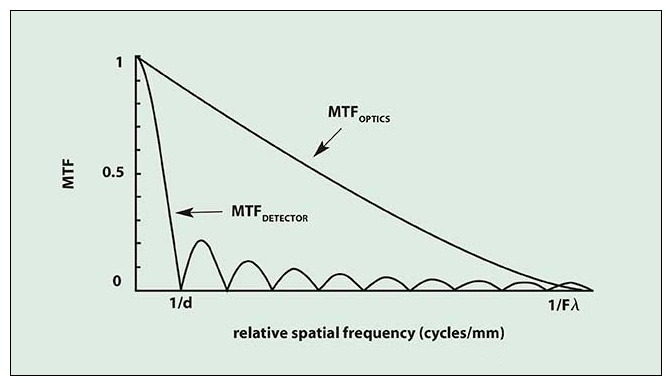
相机分辨率:融合探测器与光学性能
分辨率对于模拟到数字转换器有什么重要性
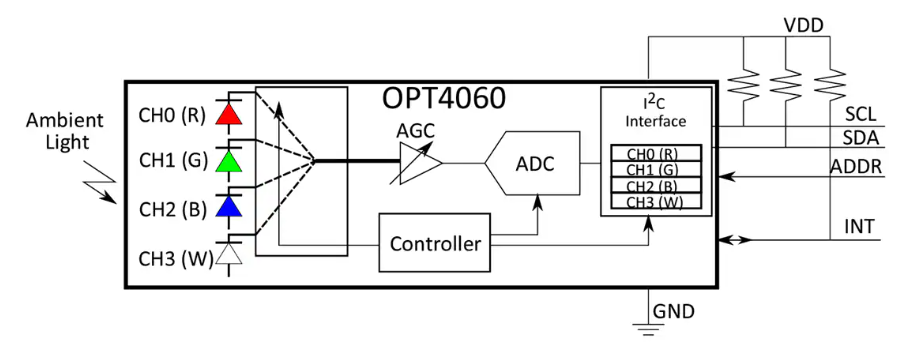
OPT4060 RGBW高分辨率颜色传感器的技术解析与应用
Zivid3D相机安装使用教程

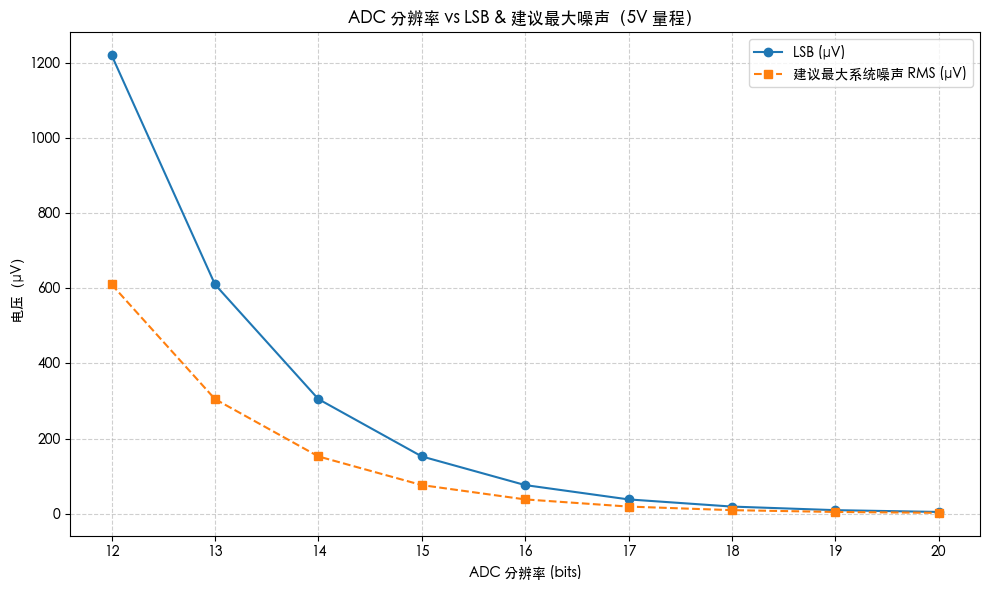
分辨率 vs 噪声 —— ADC的挑战



评论