 KUKA流水生产线的搬运、码垛运动编程的案例
KUKA流水生产线的搬运、码垛运动编程的案例
码垛分为卸垛和堆垛,物料的卸垛就是机器人将物料从物料库取出,依次放在卸垛区(物料托盘上)的过程,物料的堆垛就是机器人将物料从堆垛区(物料托盘)抓起,依次放入物料库的过程。本节以卸垛过程为例:
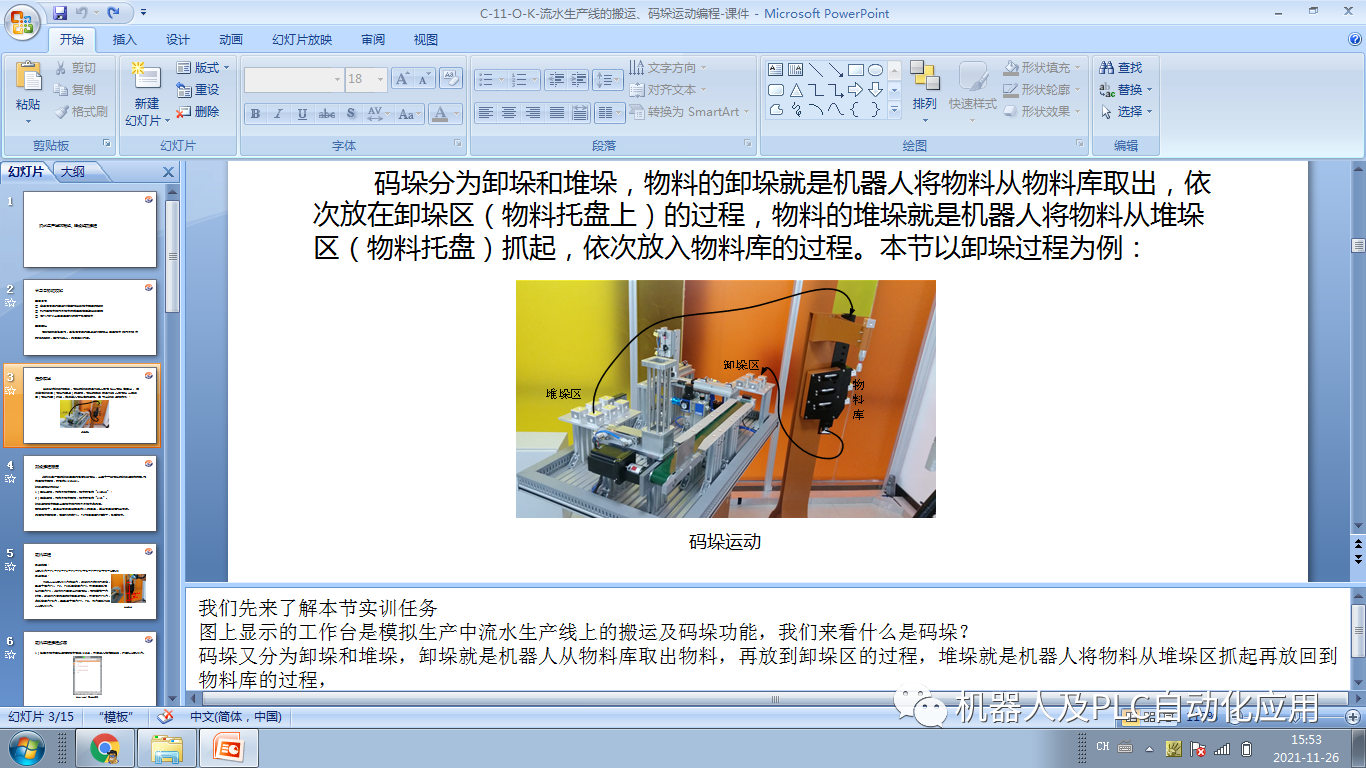
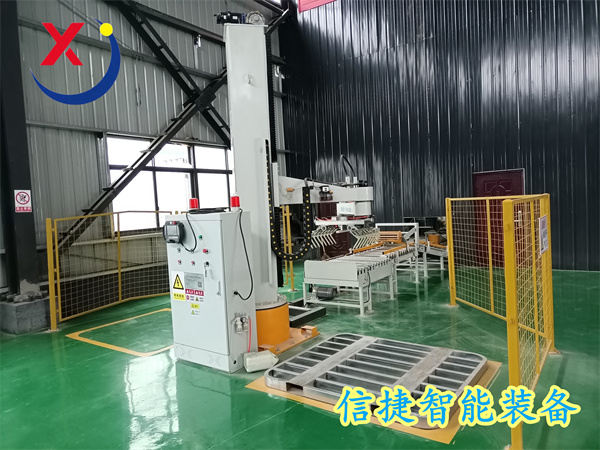
图上显示的工作台是模拟生产中流水生产线上的搬运及码垛功能,我们来看什么是码垛?
码垛又分为卸垛和堆垛,卸垛就是机器人从物料库取出物料,再放到卸垛区的过程,堆垛就是机器人将物料从堆垛区抓起再放回到物料库的过程,
本例我们先以卸垛为对象,讲述编程的相关操作
此流水生产线的卸垛运动共包含6块物料,以其中一块物料的卸垛过程为对象,作为主程序编程,命名为xieduo1。
卸垛过程分两部分:
1)取料过程,作为子程序编程,程序命名为“xieduo”;
2)摆放过程,作为子程序编程,程序命名为“xie1”。
卸垛过程程序编写以主程序调用两个子程序来完成。
编程过程中,工具坐标系选择编号为11的工具,基坐标选择世界坐标系。
完成程序编程后,在运行方式T1、T2和自动运行模式下,测试程序。
取料过程
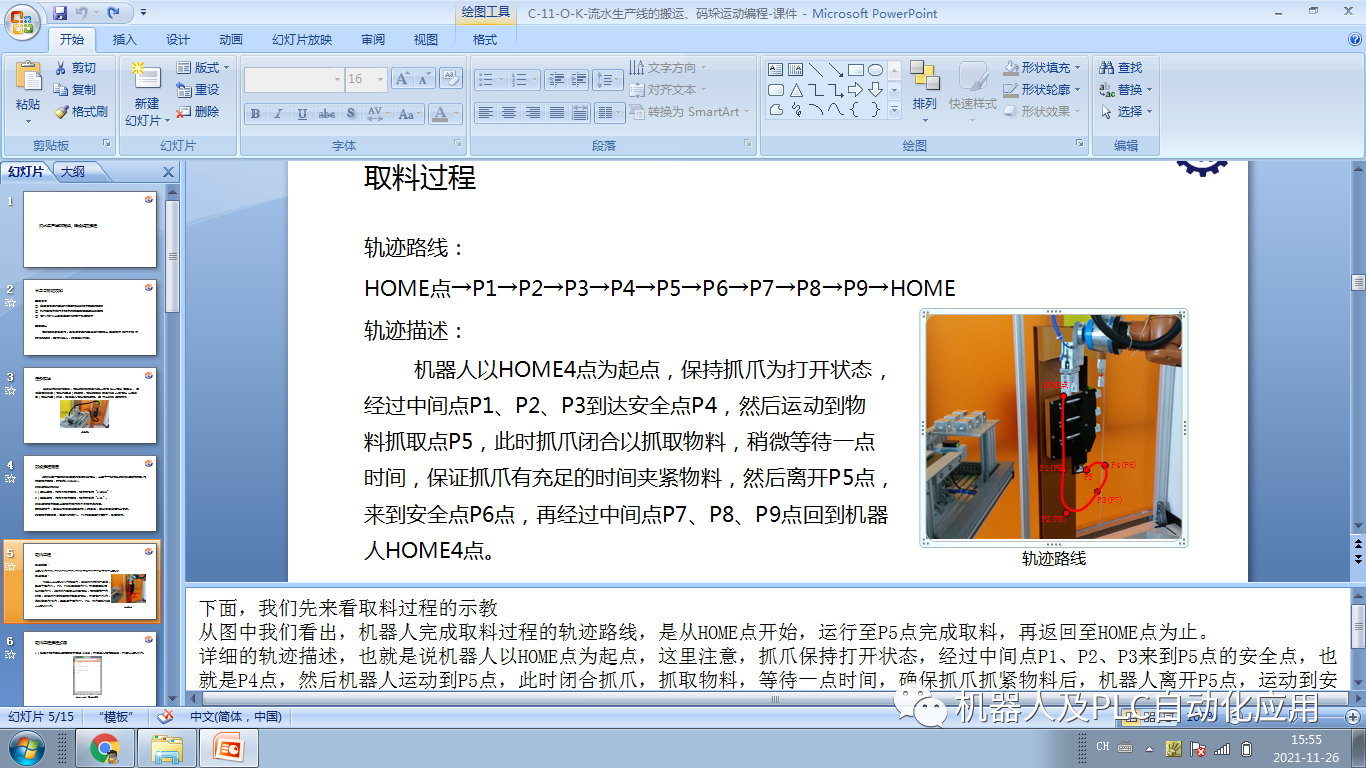
轨迹路线:
HOME点→P1→P2→P3→P4→P5→P6→P7→P8→P9→HOME
轨迹描述:
机器人以HOME4点为起点,保持抓爪为打开状态,
经过中间点P1、P2、P3到达安全点P4,然后运动到物
料抓取点P5,此时抓爪闭合以抓取物料,稍微等待一点
时间,保证抓爪有充足的时间夹紧物料,然后离开P5点,
来到安全点P6点,再经过中间点P7、P8、P9点回到机器
人HOME4点。
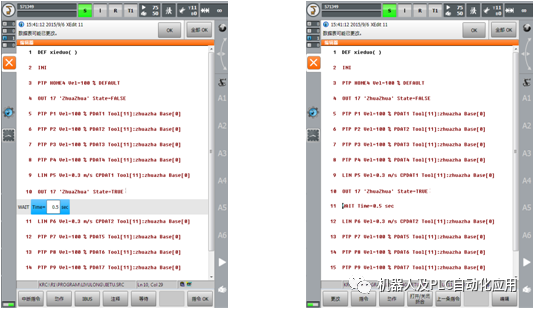
取料过程编程步骤
1)创建子程序取料过程的程序模块xieduo,然后进入程序编辑器,并确认HOME点。

2)示教机器人的取料过程,添加机器人从P1点运动到P9点的程序命令。
3)取料前,须确保工具抓爪处于打开状态,在机器人运行至P1点之前添加OUT命令,设定值为FALSE。
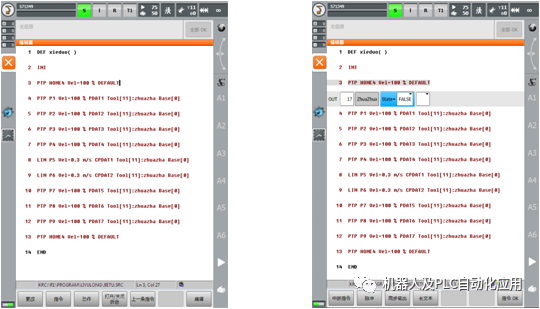
4)机器人在运行到P5点时,应关闭抓爪以抓取物料,所以在P5点命令行下添加逻辑命令OUT,设定值为TRUE。
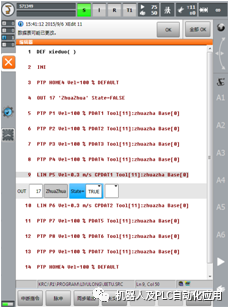
5)机器人从P5点运动到P6点之前,需完成抓爪闭合工作,添加WAIT指令,使抓爪在离开P5点之前有充足的时间夹紧物料。
6)整个抓取物料过程的程序编写,
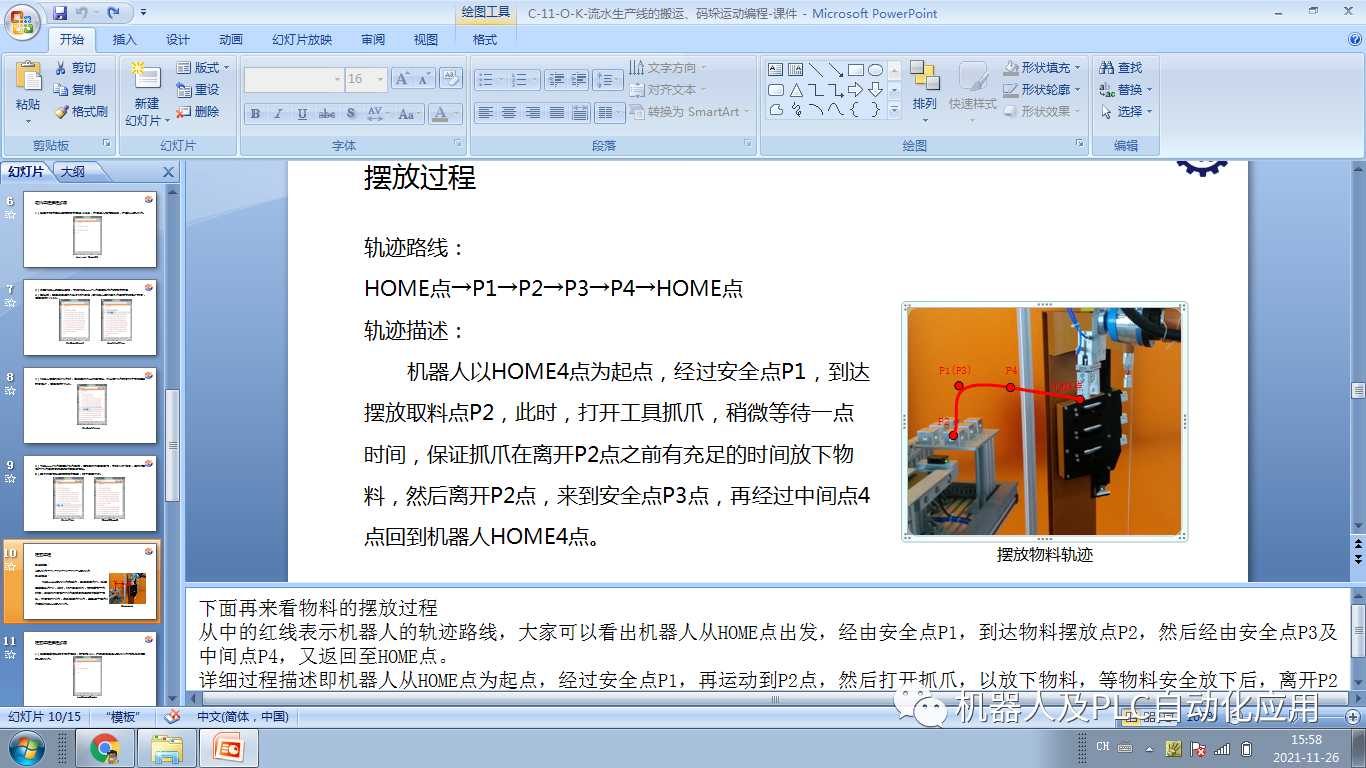
摆放过程:
轨迹路线:
HOME点→P1→P2→P3→P4→HOME点
轨迹描述:
机器人以HOME4点为起点,经过安全点P1,到达
摆放取料点P2,此时,打开工具抓爪,稍微等待一点
时间,保证抓爪在离开P2点之前有充足的时间放下物
料,然后离开P2点,来到安全点P3点,再经过中间点4
点回到机器人HOME4点。
摆放过程编程步骤:
1)创建摆放物料的子程序模块,命名为xie1,并将全局变量HOME4点作为此次示教的HOME点。
2)添加机器人从P1点到P4点的程序命令。
3)机器人运动到P2点时放下物料,应使抓爪打开,添加OUT指令,设定值为FALSE。
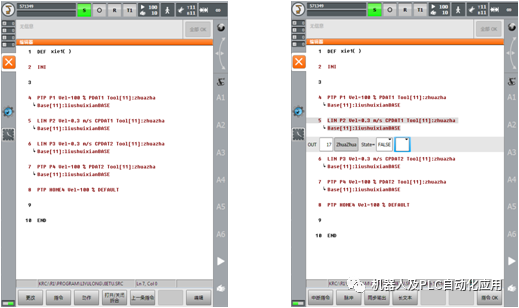
4)添加逻辑指令WAIT使工具抓爪在离开P2点之前有充足的时间放下物料。
5)机器人整个摆放过程程序编写如下右图所示。
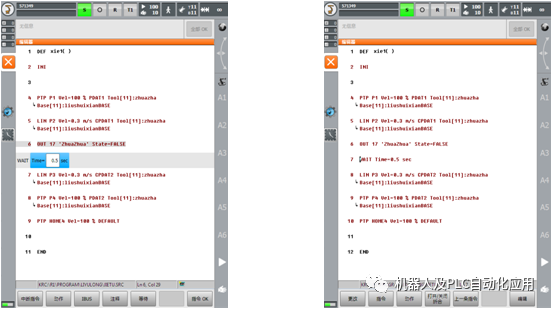
卸垛过程主程序编写步骤
1)创建卸垛过程的主程序模块xieduo1,然后删除两行PTP HOME指令。
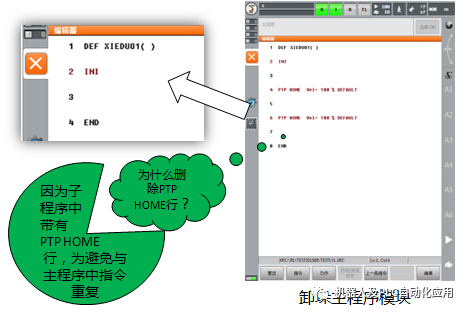
2)在编辑器内输入子程序名称和括号,xieduo()和xie1(),作为要调用的子程序。
3)关闭编辑器,主程序编程如下右图所示

最后,程序编写完成后,在T1、T2和自动运行方式下测试程序
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28437浏览量
207175 -
编程
+关注
关注
88文章
3616浏览量
93752
原文标题:KUKA 程序案例:流水生产线的搬运、码垛运动编程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
在涂料生产线,码垛机器人的用途优势

码垛机器人搬运码垛运转趋势

搬运码垛机器人的特性和运用方式
工业机器人码垛机:效高生产的新力量
在生产制造业中,码垛机器人发挥的重要作用
几种不同类型的机加工自动化生产线

码垛机器人砂浆搬运码垛优势
立柱码垛机工作原理
柔性生产线系统的构成单元有哪些
搬运机器人:打造高效、精准的汽车电子生产线
无人叉车与码垛机器人:自动化搬运的两大得力助手
三星显示斥资打造全球首条8.6代IT OLED生产线
码垛机器人代替人工搬运






 工商网监
工商网监
评论