 CC2530(zigbee)入门开发: 串口收发配置
CC2530(zigbee)入门开发: 串口收发配置
一、串口协议介绍
串口传输协议是嵌入式开发里比较常见的传输协议,开发阶段用的最多的方式就是将MCU的调试信息打印到PC机串口终端显示,方便调试错误。
一般传输协议分为两种: 并口和串口。
并口传输协议:指数据的各位同时发送或接收,每个数据位使用单独的一条导线。传输速度快、效率高,但需要的数据线较多,成本高。
串口传输协议:指数据一位接一位地顺 序发送或接收。需要的数据线少,成本低,但传输速度慢,效率低。
CC2530一共有两个串口通信接口,分别是USART0和USART1,它们能够配置成异步UART模式或者同步SPI模式。
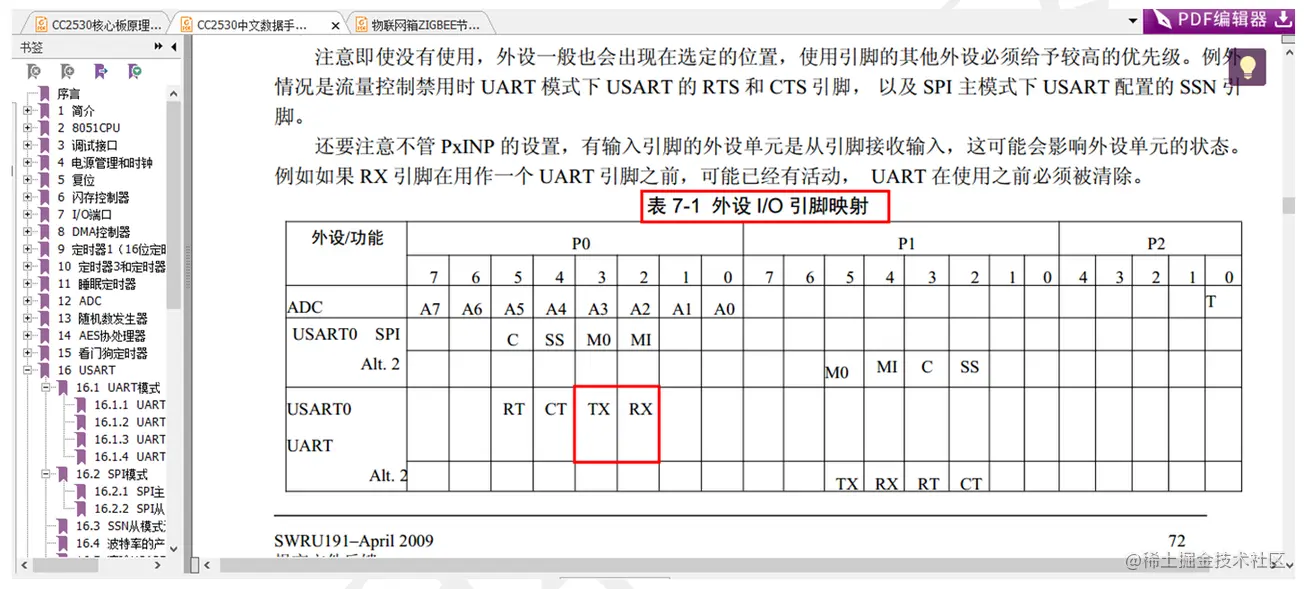
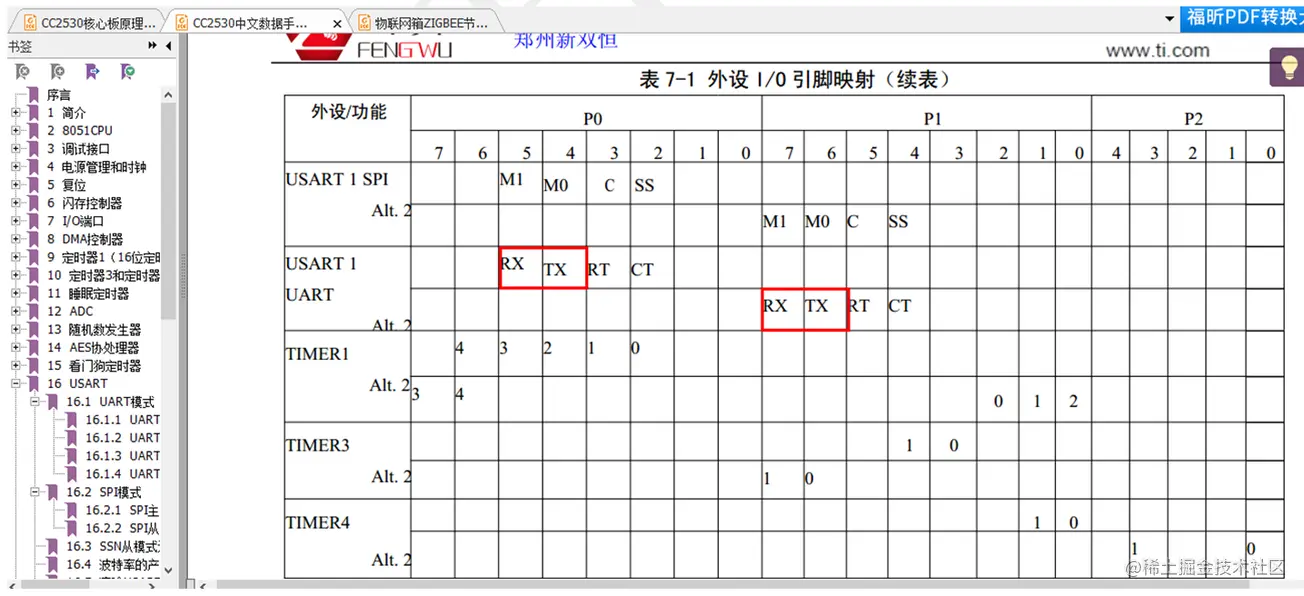
两个USART接口具有相同的功能,通过PERCFG寄存器可以设置两个USART接口对应外部I/O引脚的映射关系:
位置1:RX0 --- P0_2 TX0 --- P0_3 RX1 --- P0_5 TX1 --- P0_4
位置2:RX0 --- P1_4 TX0 --- P1_5 RX1 --- P1_7 TX1 --- P1_6
复制代码
<1> UxCSR: USARTx的控制和状态寄存器。
<2> UxUCR: USARTx的UART控制寄存器。
<3> UxGCR: USARTx的通用控制寄存器。
<4> UxDBUF:USARTx的接收/发送数据缓冲寄存器。
<4> UxBAUD:USARTx的波特率控制寄存器。
复制代码
在与PC机进行串口通信的时候是,通常需要借助USB转TTL芯片进行电压转换。 所以,在学习串口编程之前,先认识两种电平:TTL电平和RS232电平
TTL电平: 逻辑0----小于0.8V 逻辑1----大于2.4V。
RS232电平: 逻辑0----5~15V 逻辑1---- -5~-15V。
复制代码
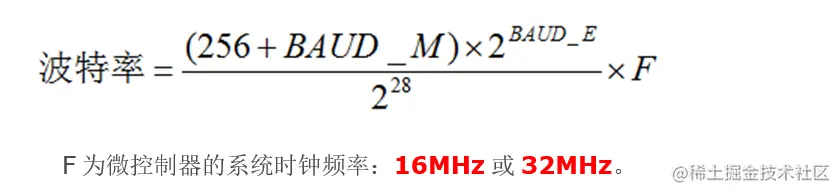
串口通信过程中,速度的指标由波特率表示。
常见的波特率设置表如下:

计算波特率的方法: CC2530的波特率由BAUD_E和BAUD_M共同决定:
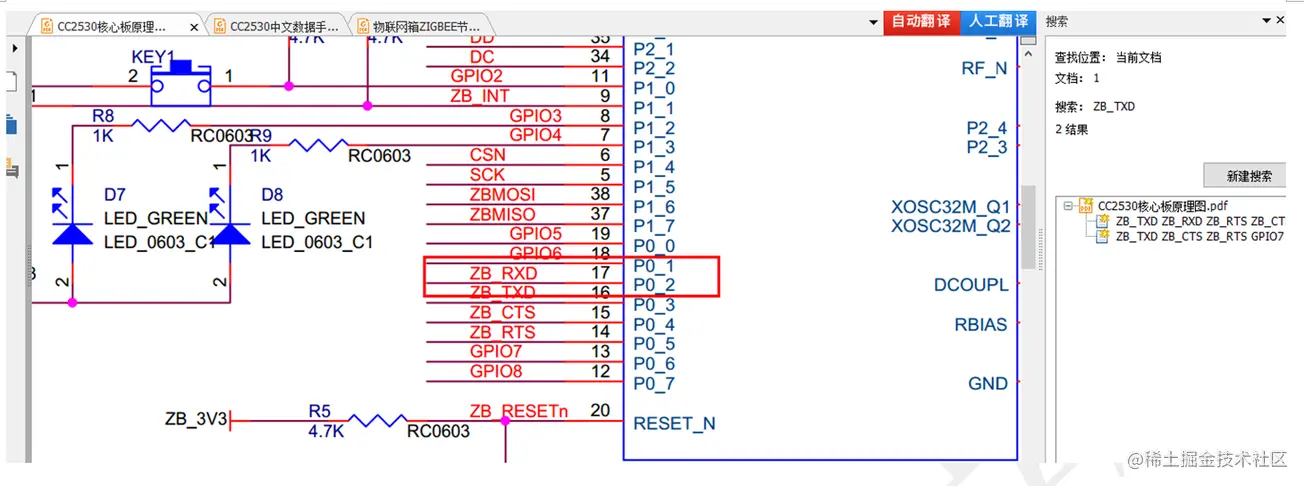
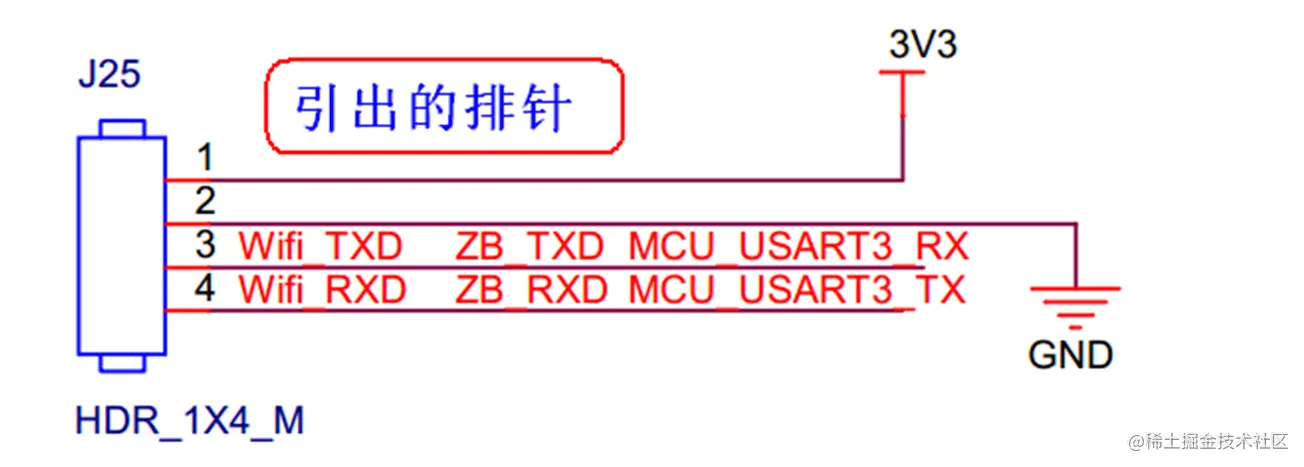
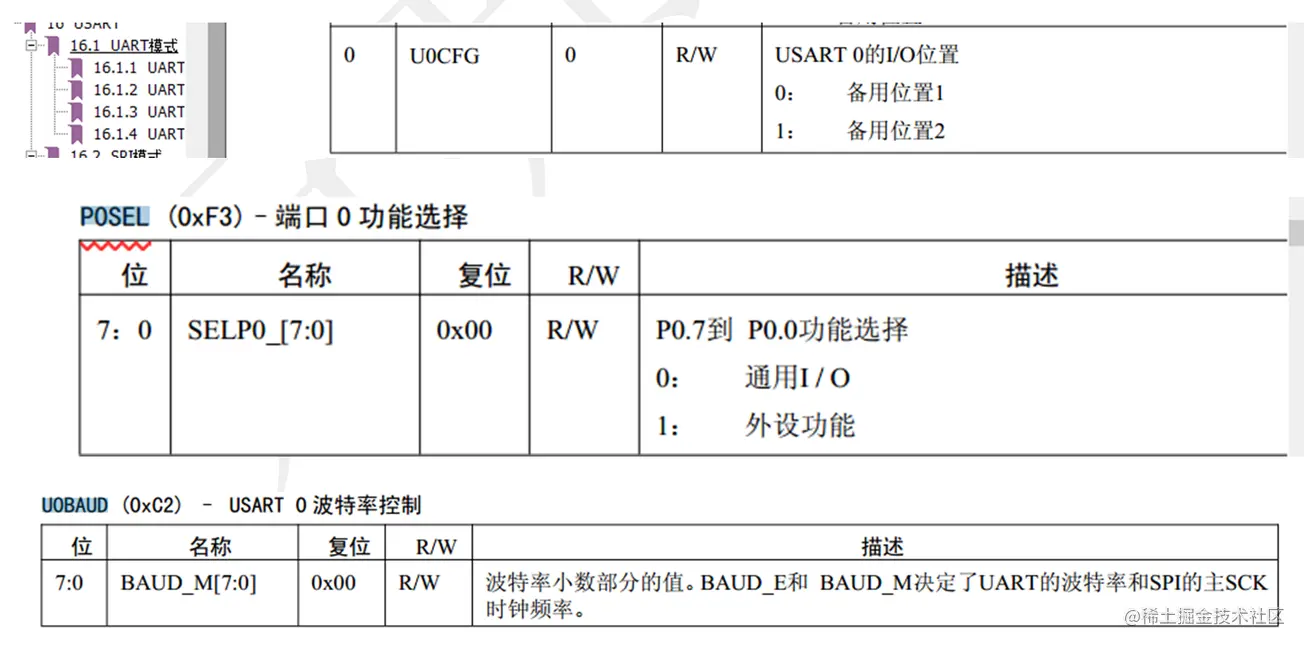
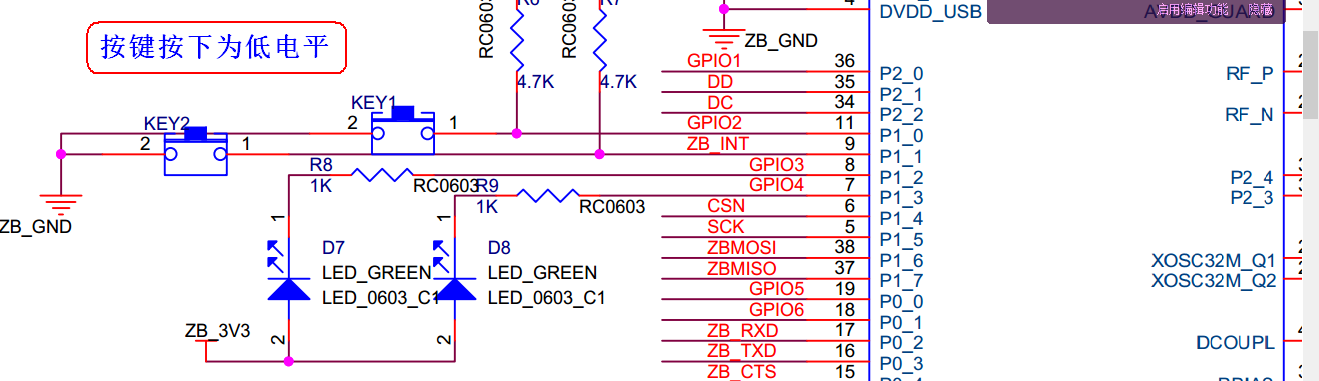
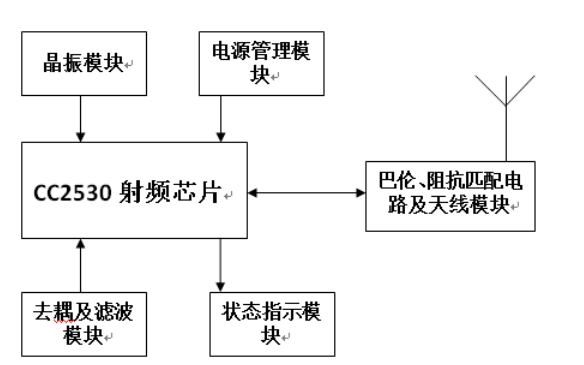
二、原理图数据手册分析
三、串口配置代码示例
3.1编写串口初始化函数,实现串口字符串发送 (CPU频率在16MHZ下,波特率的为9600)
#include
#include
//定义LED灯的端口
#define LED1 P1_2
#define LED2 P1_3
//定义KEY按键的端口
#define KEY1 P1_0 //定义按键为P1_0口控制
#define KEY2 P1_1 //定义按键为P1_1口控制
/*
函数功能:LED灯IO口初始化
硬件连接:LED1-->P1_2 , LED2-->P1_3
*/
void LED_Init(void)
{
P1DIR |=0x3<<2; //配置P1_2、P1_3为输出模式
LED1 = 1;
LED2 = 1;
}
/*
函数功能:按键IO口初始化
硬件连接:KEY1-->P1_0 KEY2-->P1_1
*/
void KEY_Init(void)
{
P1SEL&=~(0x3<<0); //配置P1_0,P1_1处于通用GPIO口模式
P1DIR&=~(0x3<<0); //配置P1_0,P1_1为输入模式
P1INP|= 0x3<<0; //上拉
}
void delay10ms(void) //误差 0us
{
unsigned char a,b,c;
for(c=193;c>0;c--)
for(b=118;b>0;b--)
for(a=2;a>0;a--);
}
/*
函数功能:按键扫描
返 回 值:按下的按键值
*/
unsigned char Key_Scan(void)
{
static unsigned char stat=1;
if((KEY1==0||KEY2==0)&&stat)
{
stat=0;
delay10ms();
if(KEY1==0)return 1;
if(KEY2==0)return 2;
}
else
{
if(KEY1&&KEY2)stat=1;
}
return 0;
}
/*
函数功能:串口0初始化
*/
void Init_Uart0(void)
{
PERCFG&=~(1<<0); //串口0的引脚映射到位置1,即P0_2和P0_3
P0SEL|=0x3<<2; //将P0_2和P0_3端口设置成外设功能
U0BAUD = 59; //16MHz的系统时钟产生9600BPS的波特率
U0GCR&=~(0x1F<<0);//清空波特率指数
U0GCR|=9<<0; //配置波特率的指数值
U0UCR |= 0x80; //禁止流控,8位数据,清除缓冲器
U0CSR |= 0x3<<6; //选择UART模式,使能接收器
}
/*
函数功能:UART0发送字符串函数
*/
void UR0SendString(char *str,unsigned int len)
{
int j;
for(j=0;j;j++)>
3.2 编写串口初始化函数,实现串口字符串发送 (CPU频率在16MHZ下,波特率为115200)
#include
#include
//定义LED灯的端口
#define LED1 P1_2
#define LED2 P1_3
//定义KEY按键的端口
#define KEY1 P1_0 //定义按键为P1_0口控制
#define KEY2 P1_1 //定义按键为P1_1口控制
/*
函数功能:LED灯IO口初始化
硬件连接:LED1-->P1_2 , LED2-->P1_3
*/
void LED_Init(void)
{
P1DIR |=0x3<<2; //配置P1_2、P1_3为输出模式
LED1 = 1;
LED2 = 1;
}
/*
函数功能:按键IO口初始化
硬件连接:KEY1-->P1_0 KEY2-->P1_1
*/
void KEY_Init(void)
{
P1SEL&=~(0x3<<0); //配置P1_0,P1_1处于通用GPIO口模式
P1DIR&=~(0x3<<0); //配置P1_0,P1_1为输入模式
P1INP|= 0x3<<0; //上拉
}
void delay10ms(void) //误差 0us
{
unsigned char a,b,c;
for(c=193;c>0;c--)
for(b=118;b>0;b--)
for(a=2;a>0;a--);
}
/*
函数功能:按键扫描
返 回 值:按下的按键值
*/
unsigned char Key_Scan(void)
{
static unsigned char stat=1;
if((KEY1==0||KEY2==0)&&stat)
{
stat=0;
delay10ms();
if(KEY1==0)return 1;
if(KEY2==0)return 2;
}
else
{
if(KEY1&&KEY2)stat=1;
}
return 0;
}
/*
函数功能:串口0初始化
*/
void Init_Uart0(void)
{
PERCFG&=~(1<<0); //串口0的引脚映射到位置1,即P0_2和P0_3
P0SEL|=0x3<<2; //将P0_2和P0_3端口设置成外设功能
U0BAUD = 216; //16MHz的系统时钟产生115200BPS的波特率
U0GCR&=~(0x1F<<0);//清空波特率指数
U0GCR|=12<<0; //16MHz的系统时钟产生115200BPS的波特率
U0UCR |= 0x80; //禁止流控,8位数据,清除缓冲器
U0CSR |= 0x3<<6; //选择UART模式,使能接收器
}
/*
函数功能:UART0发送字符串函数
*/
void UR0SendString(char *str,unsigned int len)
{
int j;
for(j=0;j;j++)>
3.3 配置串口中断接收数据
3.3 配置串口中断接收数据
#include
#include
//定义LED灯的端口
#define LED1 P1_2
#define LED2 P1_3
//定义KEY按键的端口
#define KEY1 P1_0 //定义按键为P1_0口控制
#define KEY2 P1_1 //定义按键为P1_1口控制
unsigned char dataRecv;
unsigned char Flag = 0;
/*
函数功能:LED灯IO口初始化
硬件连接:LED1-->P1_2 , LED2-->P1_3
*/
void LED_Init(void)
{
P1DIR |=0x3<<2; //配置P1_2、P1_3为输出模式
LED1 = 1;
LED2 = 1;
}
/*
函数功能:按键IO口初始化
硬件连接:KEY1-->P1_0 KEY2-->P1_1
*/
void KEY_Init(void)
{
P1SEL&=~(0x3<<0); //配置P1_0,P1_1处于通用GPIO口模式
P1DIR&=~(0x3<<0); //配置P1_0,P1_1为输入模式
P1INP|= 0x3<<0; //上拉
}
void delay10ms(void) //误差 0us
{
unsigned char a,b,c;
for(c=193;c>0;c--)
for(b=118;b>0;b--)
for(a=2;a>0;a--);
}
/*
函数功能:按键扫描
返 回 值:按下的按键值
*/
unsigned char Key_Scan(void)
{
static unsigned char stat=1;
if((KEY1==0||KEY2==0)&&stat)
{
stat=0;
delay10ms();
if(KEY1==0)return 1;
if(KEY2==0)return 2;
}
else
{
if(KEY1&&KEY2)stat=1;
}
return 0;
}
/*
函数功能:串口0初始化
*/
void Init_Uart0(void)
{
PERCFG&=~(1<<0); //串口0的引脚映射到位置1,即P0_2和P0_3
P0SEL|=0x3<<2; //将P0_2和P0_3端口设置成外设功能
U0BAUD = 216; //16MHz的系统时钟产生115200BPS的波特率
U0GCR&=~(0x1F<<0);//清空波特率指数
U0GCR|=12<<0; //16MHz的系统时钟产生115200BPS的波特率
U0UCR |= 0x80; //禁止流控,8位数据,清除缓冲器
U0CSR |= 0x3<<6; //选择UART模式,使能接收器
UTX0IF = 0; //清除TX发送中断标志
URX0IF = 0; //清除RX接收中断标志
URX0IE = 1; //使能URAT0的接收中断
EA = 1; //使能总中断
}
/*
函数功能:UART0发送字符串函数
*/
void UR0SendString(char *str,unsigned int len)
{
int j;
for(j=0;j;j++)>
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
串口
+关注
关注
14文章
1555浏览量
76562 -
传输协议
+关注
关注
0文章
78浏览量
11451 -
CC2530
+关注
关注
19文章
221浏览量
58059
发布评论请先 登录
相关推荐
cc2530芯片有哪些功能
CC2530是专门针对IEEE 802.15.4和Zigbee应用的单芯片解决方案,经济且低功耗。 CC2530有四种不同的版本:CC2530-F32 / 64 / 128 / 256
发表于 11-08 11:05
•2.3w次阅读
cc2530程序设计实例之CC2530 RF部分使用—实现点对点收发
本文主要介绍了cc2530程序设计实例之CC2530 RF部分使用—实现点对点收发,通过串口调试助手发送字节数据。例如通过串口向设备A发送H
发表于 12-09 12:22
•2.2w次阅读

基于CC2530的ZigBee协调器节点设计
本文给出了基于TI新一代芯片CC2530的ZigBee协调器节点设计方法,该方法选用TICC2591作为射频前端芯片。
发表于 01-05 15:25
•4.9w次阅读
CC2530芯片的基本特性和CC2530无线模块的设计
本文介绍了CC2530芯片的基本特性,论述了以CC2530芯片为核心的无线通信模块的硬件设计和调试软件设计,在介绍设计规范和模块结构的基础上,采用TI公司的CC2530芯片作为主控制芯片设计出具
发表于 02-11 08:00
•97次下载

如何使用ZigBee TI ZStack CC2530 2.5搭建开发环境
本文档的主要内容详细介绍的是如何使用ZigBee TI ZStack CC2530 2.5搭建开发环境。
发表于 05-10 18:14
•26次下载
微雪电子ZIGBEE开发板 CC2530 Eval Kit简介
ZigBee CC2530 串口透传 开发套件 物联网套件 板载电池插槽 支持多种供电方式 引出所有IO 方便用户功能扩展 板载一个CP2102 方便调试下载 型号
微雪电子ZIGBEE开发板 CC2530 Eval Kit5简介
ZigBee CC2530 串口透传 开发套件 XBEE 物联网套件 直插接口兼容Xbee 支持自动组网 支持板载PCB天线及IPEX外接天线 型号

CC2530(zigbee)入门开发: 安装IAR开发环境
CC2530本身是一个51单片机内核,开发过51的搞起来非常容易,也就是多了一个无线射频部分;如果不使用无线射频功能,那么就和一个正常的51单片机一样。要进行CC2530的软件开发,需







 工商网监
工商网监
评论