 无人机如何完成到手光流激光定位操作
无人机如何完成到手光流激光定位操作
近日,北醒联合云讷举办了无人机技术分享直播,两位主讲嘉宾分别是北醒资深产品经理-刘扬,研究生毕业于法国国立奥尔良大学,在激光雷达领域有多年的行业经验与研究;另一位是是云讷科技合伙人-王唐林王总,具有军工院所、公司从业经历,从事工业级产品开发近十年。
直播内容从行业情况、技术原理、应用落地、技术教程等方面深入浅出的进行了分享,期间大家互动火热对无人机定高等技术有诸多探讨与头脑风暴。
今天小编针对直播回放内容“激光雷达与光流技术如何强强联手”进行深度解析:
大多数无人机在起飞降落、悬停及水平飞行过程中,需要获取距离地面的绝对高度信息来控制起降速度及恒定飞行高度,以确保无人机飞行安全。常见的无人机定高传感器有GPS、毫米波雷达和激光雷达传感器。GPS在室内使用时存在信号丢失及精度差等问题。毫米波体积较大且帧率较低,不适用于该场景。Kerloud无人机采用PX4FLOW光学传感器和北醒单点激光雷达TF-Luna混合感知方案,完美解决无人机在室内飞行定位,起降及悬停等问题。如视频中所示,按照本文所示的操作步骤可实现无人机半自动室内飞行。
北醒单点激光雷达TF-Luna是一款高帧率、高精度、小体积、高性价比的空间距离传感器。TF-Luna体积小、重量轻,将其安装在无人机下方,可以实时探测无人机到正下方地面的距离信息并反馈给无人机。无人机依据TF-Luna实时传回的高度信息,完成起降、悬停及水平飞行等。
具体表现在,激光雷达实时探测无人机对地高度。当无人机飞行高度小于激光雷达量程时,激光雷达可快速且精准输出高度信息。当无人机飞行高度高于激光雷达量程时,激光雷达会输出极大值或0,此时无人机需采用其它传感器数据,如GPS。在无人机起降过程中,激光雷达可输出连续的随时间变化的距离曲线。
此时采用激光雷达定高的过程是灵活且安全的,飞控系统会根据预设的高度信息,结合激光雷达的距离数据,实时调整飞机上升或下降。当激光雷达输出的距离值大于设定高度时,无人机将下降,反之则升高,从而维持在一个恒定的高度飞行。最后激光雷达将辅助无人机缓慢下降直至平稳落地,避免坠机风险。
激光雷达定高优势
及产品推荐
探测频率高
测量精度高
体积小,重量轻,易于安装集成
测距量程远
平均价格低于毫米波雷达
单点激光雷达视场角小
北醒TF02-Pro激光雷达为例,净重50g,在无人机下降至低空0.1-40m范围内,通过最高1000Hz的高频探测,可辅助无人机获取距地高度。相较于超声波测距传感器,不易受复杂环境的多次回波干扰,且无探测延时。3°视场角使无人机在定高时,不易因探测光束过大,探测到地面其他干扰物体而产生误报。
Kerloud UAV
室内光流激光定位操作
Kerloud UAV系列作为云讷科技(深圳)面向无人机系统集成爱好者的高性价比开发平台,支持PX4、Dronecode、ROS、Nvidia和Ubuntu等高级软件社区。产品设计紧凑,室内外场景通用;机身可搭载树莓派、Nvidia Jetson电脑及Intel Realsense深度相机等,基于ROS开发环境及云讷官方提供的开源SDK,用户可便捷开展实时图像处理、深度学习、室内SLAM、室外避障等应用开发。
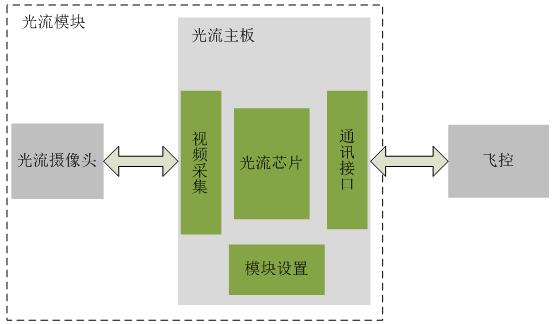
搭载光流配置的Kerloud无人机,为用户以少量设置实现室内定位提供了方便的选择。该平台配备有PX4FLOW光学传感器和北醒TF-Luna激光雷达测距传感器,PX4FLOW是PX4社区中的一款基于摄像头的智能传感器,在水平速度估计方面表现出色;TF-Luna则可在高度测量中提供厘米级精度。该配置飞机在具备纹理地面的室内环境中,水平、垂直定位精度分别可达到0.1m、0.05m级别。此外,飞机也支持室外环境下的无GPS飞行。(本教程将演示Kerloud UAV基于光流实现室内定位的操作方法,更多信息详见云讷科技官网。)
1. 环境要求使用光流传感器,需要室内地面具备丰富的纹理,因此建议用户使用棋盘纸或其他图案来对地面进行覆盖、装饰。另外,PX4FLOW相机的光照条件也要足够。
2. 固件设置搭载光流配置的Kerloud无人机在出厂阶段已正确配置。面向室内场景,可在QGroundcontrol界面中配置如下参数:
SENS_EN_TF: 2SENS_EN_PX4FLOW: 1EKF2_HGT_MODE: 2EKF2_AID_MASK: 2EKF2_MAG_TYPE: 0EKF2_OF_POS_Y: -0.07
参数说明如下:SENS_EN_TF: 启动北醒TF测距传感器驱动程序。SENS_EN_PX4FLOW: 启动PX4FLOW驱动程序。EKF2_HGT_MODE: 将激光测距仪设置为主要高度信息源。EKF2_AID_MASK: 启动EKF估计中的光流设置。EKF2_MAG_TYPE: 设置磁力计航向测量为自动模式。EKF2_OF_POS_Y: 设置光流传感器在体坐标系Y轴的相对位置。
3. 光流对焦设置PX4FLOW传感器的相机镜头在出厂时已调好,官方调参指引可参见:https://docs.px4.io/master/en/sensor/px4flow.html。
简要陈述:用户可使用提供的micro-usb线,将PX4FLOW传感器接入运行有QGC的电脑,然后在QGC设置菜单中选择PX4FLOW,很快就能在QGC界面中看到来自PX4FLOW相机的图像。用户可简单地放置一本书在地面,将相机抬高到想要飞行的高度(一般为1~3米),拧下固定螺丝,然后通过拧松、拧紧镜头寻找焦点位置以实现对焦。当书本的边缘在图像中清晰可见时(参见下图),调焦结果可视为能接受。
4. 传感器数据查看设置后可以通过QGC地面站查看确认光流传感器和激光测距传感器数据:
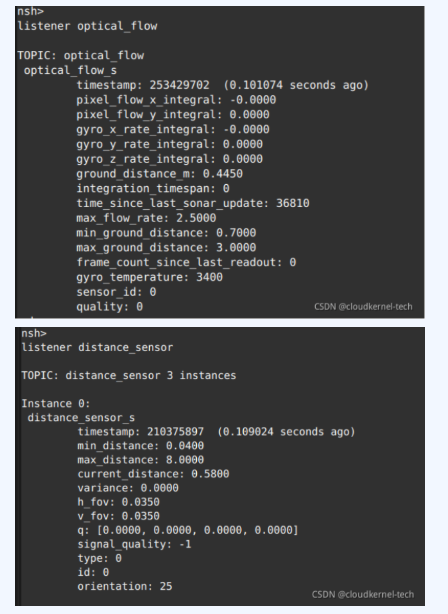
以上4步即可完成无人机到手光流激光定位操作,简单便捷,基本到手即用。
-
传感器
+关注
关注
2550文章
51014浏览量
752993 -
无人机
+关注
关注
228文章
10418浏览量
180074 -
激光雷达
+关注
关注
968文章
3967浏览量
189808
发布评论请先 登录
相关推荐
无人机光伏巡检的优势
光伏电站无人机巡检系统的具体应用与优势
光伏无人机巡检系统的应用

无人机巡检系统光伏巡检方案与作用
无人机巡检系统在光伏电站的应用
无人机飞行中定位误差的影响探究





 工商网监
工商网监
评论