 飞凌嵌入式OKA40i-C开发实现SPI转CAN功能
飞凌嵌入式OKA40i-C开发实现SPI转CAN功能
全志A40i或者T3的CPU中无CAN控制器,而在实际使用过程中,会用到CAN,通常会采用SPI转CAN的方式。
本文基于飞凌嵌入式OKA40i-C开发板进行操作,其他品牌开发板可视情况参考。
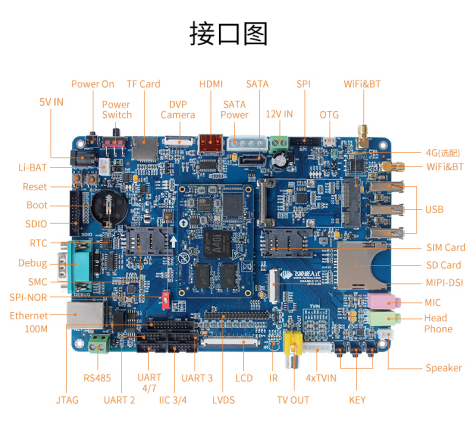
在OKA40i-C底板上,有一路SPI,但由于电压与mcp2515的电压不匹配,所以会采用串口2的这组复用为SPI外接mcp2515模块。
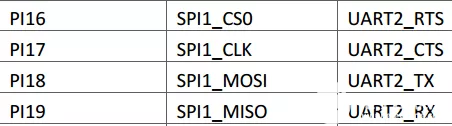
根据CPU手册第三章描述,可以将PI17-19复用为SPI1,采用PH08作为中断。
A40i/T3采用sys_config.fex或者dts 配置引脚复用功能,下面我们采用dts 进行配置。
01-打开SPI1
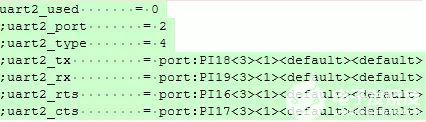
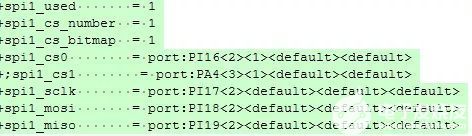
修改sys_config.fex,将uart2的配置去掉,打开SPI1的配置。
同时将PH08注释掉:

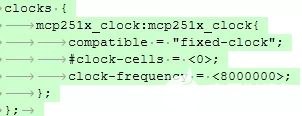
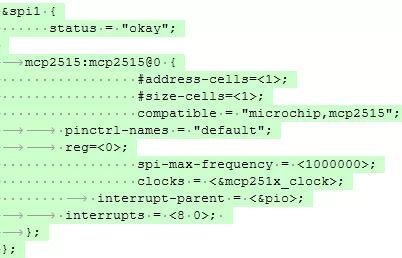
同时修改设备树:
02-修改defconfig
采用通过其他平台验证,且适配设备树的驱动mcp251x.c,
修改defconfig 配置文件:
Networking support ---> CAN bus subsystem support --->CAN Device Drivers --->Microchip MCP251x SPI CAN controllers选中。
同时选中SPI配置,默认已支持,此处不再说明。
03-配置iproute
文件系统:
buildroot-201611/configs/sun8iw11p1_hf_defconfig
需要配置上BR2_PACKAGE_IPROUTE2=y.
重新编译,并打包镜像,烧录。
04-测试can0节点
启动之后,ifconfig 查看出现can0节点。使用以下命令进行测试:
ifconfig can0 down ip link set can0 up type can bitrate 125000 triple-sampling on ifconfig can0 up cansend can0 123#12345678 candump can0
如果有必要请联系飞凌技术服务人员,提供patch文件。
注意事项
在设备树中,用作中断时,因A40i/T3只能使用PH组的引脚复用为中断,在设备树中设置中断时的如下:
interrupt-parent = <&pio>; interrupts = <8 0>;
另外,需要注意驱动中的中断触发方式。
-
嵌入式
+关注
关注
5103文章
19265浏览量
309968 -
CAN
+关注
关注
57文章
2788浏览量
465170 -
开发板
+关注
关注
25文章
5208浏览量
99106 -
飞凌
+关注
关注
0文章
134浏览量
16240
发布评论请先 登录
相关推荐
全志A40i开发版及T3开发板 SPI转CAN的使用方式
【飞凌OKA40i-C开发板试用体验】伺服电机控制之准备篇

【飞凌OKA40i-C开发板试用体验】LVGL移植与测评
【飞凌OKA40i-C开发板试用体验】玩转FFmpeg
【飞凌OKA40i-C开发板试用体验】HDMI显示测试

发烧友实测 | OKA40i-C开发板编译环境的搭建

发烧友实测 | OKA40i-C开发板SATA硬盘挂载及读写速率测试

只需4步,让OKA40i-C开发板的Linux系统拥有中文显示






 工商网监
工商网监
评论