 如何使用TDA2030实现步进电机控制器的设计
如何使用TDA2030实现步进电机控制器的设计
有多种版本的步进电机类型,也有多种版本的步进电机控制器设计。本电路是一款使用ICTDA2030作为驱动器的通用步进电机控制器。该电路可用于大约5V至18V的宽工作电压范围。它可以以等于电源电压一半的峰值电压驱动电机,因此它可以轻松处理为2.5V之间的电压设计的步进电机和9V。
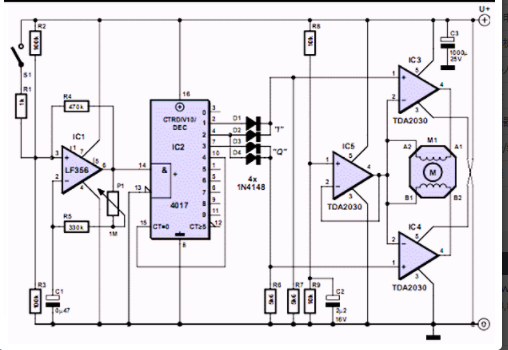
这意味着它可以用于驱动相对较大的电机。该电路还具有短路保护功能,并具有内置的过温保护功能。驱动步进电机需要两个信号。从逻辑上讲,它们构成了格雷码,也就是说它们是两个频率相同但相位差恒定为90度的方波信号。
IC1产生一个方波信号,其频率可以使用电位计P1进行设置。该频率决定了步进电机的转速。格雷码由4017形式的十进制计数器生成。计数器的输出Q0~Q9响应时钟信号的上升沿连续变高。格雷码可以通过使用两个OR门从输出生成,这里使用两个二极管和一个电阻器形成每个门,以产生I和Q信号。
这里的“I”代表“同相”,“Q”代表“正交”,这意味着它与I信号有90度的相位偏移。通常的做法是驱动步进电机的绕组,每个绕组使用一对推挽电路,称为“H桥”。这使得可以反转通过每个绕组的电流方向,这对于双极电机(其绕组没有中心抽头)的正常运行是必要的。
当然,它也可以用来正确驱动单极电机(带有中心抽头绕组)。在这里,我们决定使用音频放大器IC(TDA2030型),而不是使用这种推挽电路,尽管这听起来有点奇怪。从功能上讲,TDA2030实际上是一种功率运算放大器。它在输入端有一个差分放大器,在输出端有一个推挽驱动级。
IC3、IC4和IC5都是这种类型(价格经济)。这里IC3和IC4作为比较器接线。它们的非反相输入由前面提到的I和Q信号驱动,反相输入设置为等于电源电压一半的电位。该潜力由第三个TDA2030提供。因此,IC3和IC4的输出跟踪它们的非反相输入,并且它们中的每一个都驱动一个电机绕组。
绕组的另一端依次连接到由IC5提供的一半电源电压。由于每个绕组的一端连接到在0V和接近电源电压的电位之间交替的方波信号,而另一端处于电源电压的一半,因此始终施加等于电源电压一半的电压到每个绕组,但它的极性会根据I和Q信号的状态交替变化。
这正是我们想要驱动双极步进电机的原因。使用电位计P1可以改变转速,但每种电机的实际速度不同,因为它取决于每转的步数。原型中使用的电机提前了大约9?每步,其速度可以在每转大约2到10秒的范围内进行调整。
原则上可以通过调节C1的值来获得任何所需的速度,只要电机可以处理即可。通过减小电阻R5的阻值可以增加P1的调节范围。调整范围为1:(1000+R5)/R5,其中R5以k为单位。如果通过从电路中移除电源电压来关闭步进电机,则电机可能会继续转动一定量由于其自身的惯性或电机上的机械负载(飞轮效应)。
当电路首次通电时,电机的位置也可能与I和Q信号的状态不一致。因此,电机在启动时有时会“混淆”,结果是在开始沿驱动信号定义的方向移动之前,它会朝错误的方向迈出一步。这些影响可以通过添加可选开关S1和1-k电阻器来避免,然后可用于启动和停止电机。当S1闭合时,时钟信号停止,但IC2在那一刻保持其输出电平,因此通过电机绕组的连续电流将转子磁“锁定”到位。
TDA2030具有内部过温保护,因此如果IC过热,输出电流会自动降低。因此,在使用功率相对较大的电机时,建议将IC3、IC4和IC5安装到散热器(可能是共用散热器)上。TO220外壳的接线片与负电源电压引脚电连接,因此IC可以连接到共享散热器,而无需使用绝缘垫圈
-
步进电机
+关注
关注
151文章
3120浏览量
147798 -
电机控制器
+关注
关注
20文章
541浏览量
32162
发布评论请先 登录
相关推荐
TDA2030功放IC的多种应用电路
求元件TDA2030封装或包含TDA2030的库下载,急用!
tda2030中文资料汇总(tda2030引脚图及功能_内部电路及应用电路)





 工商网监
工商网监
评论