 一种能够提供实时传感和快速驱动的微型微流体操控系统
一种能够提供实时传感和快速驱动的微型微流体操控系统
微流体操控系统可以感知液体并控制其流动。然而,传统的传感器和电机很难适应空间有限的微流体装置;此外,由于流体的快速流动,导致快速传感和制动存在一定困难,因此,亟需开发一种能够提供实时传感和快速驱动的微型微流体操控系统。
据麦姆斯咨询报道,为了实现上述目标,南开大学刘遵峰教授团队利用螺旋非线性应力的中空纤维,开发了快速扭转和拉伸驱动器,可以感知流体温度并将流体分类到所需的容器中。在对流体流量的响应方面,所设计的驱动器具有高驱动行程(87.5%)、快速响应速度(0.88s)和高温度灵敏度(0.5K温度变化时旋转20°),其工作能力和功率密度分别是空气驱动固体纤维的1.5倍和90倍。相关工作以“Microfluidic manipulation by spiral hollow-fibre actuators”为题发表在Nature Communications上。
具体而言,中空纤维驱动器采用内部(x)和外部(y)直径不同的低密度聚乙烯中空纤维(PEHFs)制备而得,并以PEHFx-y形式命名。由于制备过程中形成的紧结分子形态,PEHF具有各向异性的热膨胀行为。此外,PEHF具有较高的强度和柔韧性,断裂强度为39.4 MPa,断裂应变为188.4%。
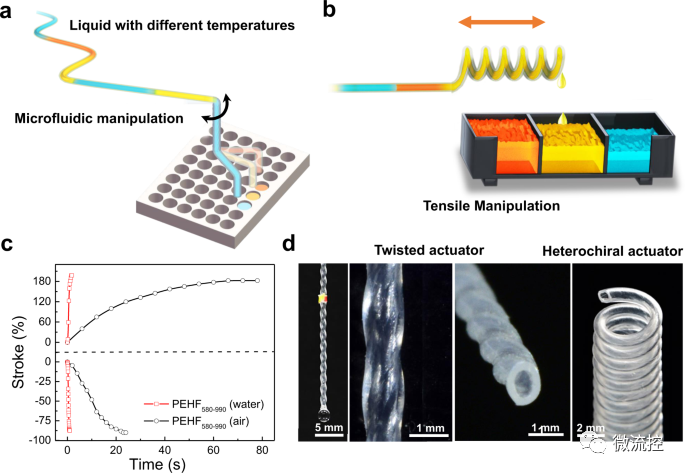
图1 用于微流体操控的中空纤维驱动器
此外,研究发现,流动的热水可引起中空纤维驱动器的扭转旋转,表明通过感应水温对微流体进行扭转操控的可能性。具体地,研究人员制备得到PEHF580-990驱动器的189°/cm旋转角度对应归一化的旋转角度为18.9°,对应插入捻度变化为13.1%,这也可与以往研究中报道的扭转驱动器相媲美。
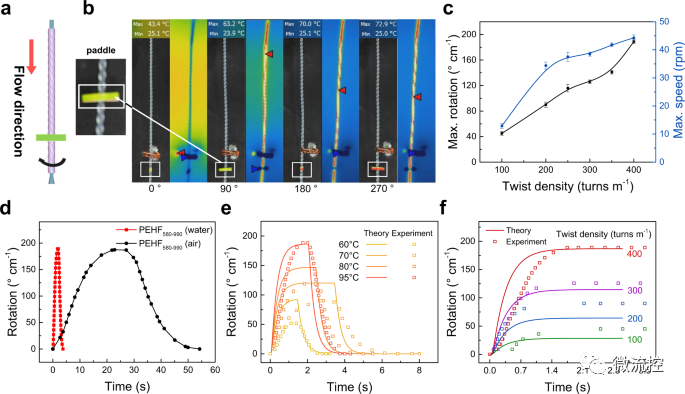
图2 扭转PEHF580-990驱动器的驱动性能
而拉伸中空纤维驱动器根据卷曲和扭转方向表现出不同的手性——相同的卷曲和扭转方向产生的是同手性线圈,线圈体积膨胀时会收缩;相反的卷曲和扭转方向产生的是异手性线圈,线圈体积膨胀时会膨胀。
进一步研究发现,当输送流体的温度发生变化时,线圈中空纤维驱动器的快速响应和大驱动行程允许精确的传感和微流体操作,可以实时显示液体的温度,并为不同温度的液体分类到所需容器提供可能性。
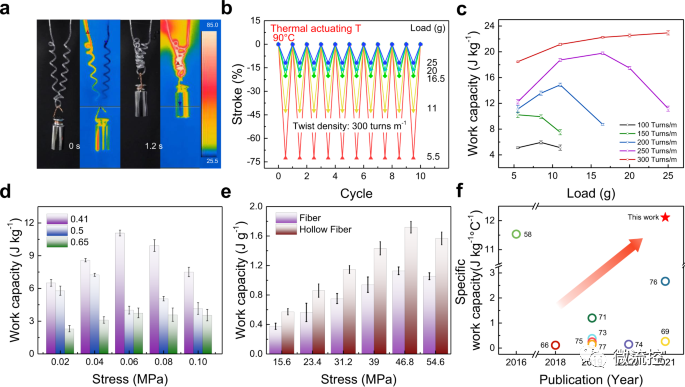
图3 流体驱动的同手性中空纤维驱动器的驱动性能
总体而言,扭转和拉伸中空纤维驱动器可以用于微流体操控,并根据液体温度对输送液体进行精确的旋转和平移。其中,扭转型中空纤维驱动器可以在液体在不同温度下流动时进行不同角度的旋转。同手性拉伸中空纤维驱动器在输送不同温度的液体时可以收缩不同长度,可收缩驱动器可以通过收缩不同长度输送和分类液体。
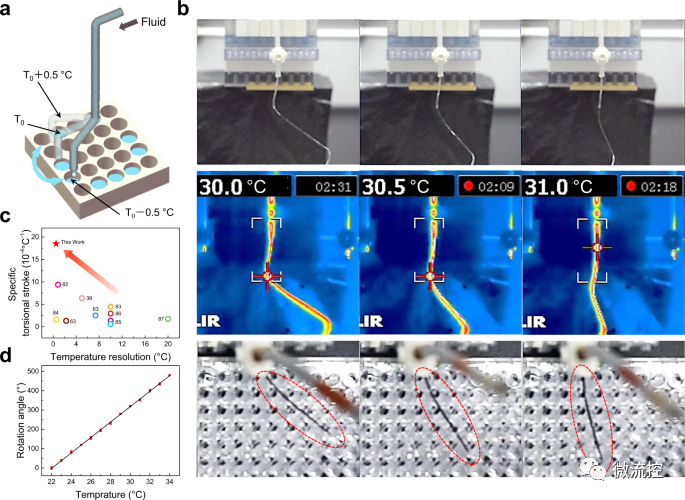
图4 PEHF580-990驱动器的微流体传感和操作
此外,研究人员还演示了中空纤维驱动器作为夹子捕捉对象,实现提升2g负载和释放负载,这为中空纤维驱动器在软机器人和工业制造中作为响应速度快、行程大的人造肌肉的应用提供了可能性。
总之,该项研究为高通量生物传感和药物合成提供了一个新的平台。流体驱动驱动器的快速响应和高功率密度保证了其在外骨骼和人工肌肉方面的应用,例如:开发强大的软机器人和自动化生产线。此外,独特的设计为生物标记物传感和药物控制释放、3D打印机、变形飞机、智能建筑和其他光学或磁性应用等设备的开发提供了新的机遇。
论文链接:
https://doi.org/10.1038/s41467-022-29088-9
审核编辑 :李倩
-
传感器
+关注
关注
2550文章
51035浏览量
753083 -
驱动器
+关注
关注
52文章
8226浏览量
146253 -
微流体
+关注
关注
0文章
34浏览量
8550
原文标题:螺旋中空纤维驱动器实现微流体的快速传感和操控
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
为电机一体化应用提供一种大电流单通道集成电机驱动芯片

基于磁珠操控的微流控平台实现副溶血性弧菌的快速捕获与检测

S型微流控芯片的优势
微流控流量控制系统之恒压泵

研究人员提出一种电磁微镜驱动系统
基于一种AI辅助可穿戴微流控比色传感器系统

ATA-4012C高压功率放大器在精准医疗的MEMS微流控研究中的应用
微内核实时操作系统的介绍
一种手掌大小的气体传感器和分析仪,可实时检测多种有毒气体

虫情测报灯预警系统是一种基于虫情监测的智能预警系统
浅谈微流控芯片技术

智能操控及无线测温产品在内蒙古东立项目中的应用
一种光固化通道数字微流控芯片(pCDMF)





 工商网监
工商网监
评论