 动态链接过程中是如何进行符号重定位的
动态链接过程中是如何进行符号重定位的
在上一篇文章中,我们一起学习了Linux系统中 GCC编译器在编译可执行程序时,静态链接过程中是如何进行符号重定位的。GCC 链接过程中的【重定位】过程分析
为了完整性,我们这篇文章来一起探索一下:动态链接过程中是如何进行符号重定位的。
老样子,文中使用大量的【代码+图片】的方式,来真实的感受一下实际的内存模型。
文中使用了大量的图片,建议您在电脑上阅读此文。
关于为什么使用动态链接,这里就不展开讨论了,无非就几点:
节省物理内存;
可以动态更新;
动态链接要解决什么问题?
静态链接得到的可执行程序,被操作系统加载之后就可以执行执行。
因为在链接的时候,链接器已经把所有目标文件中的代码、数据等Section,都组装到可执行文件中了。
并且把代码中所有使用的外部符号(变量、函数),都进行了重定位(即:把变量、函数的地址,都填写到代码段中需要重定位的地方),因此可执行程序在执行的时候,不依赖于其它的外部模块即可运行。
详细的静态链接过程,请参考上一篇文章:GCC 链接过程中的【重定位】过程分析。
也就是说:符号重定位的过程,是直接对可执行文件进行修改。
但是对于动态链接来说,在编译阶段,仅仅是在可执行文件或者动态库中记录了一些必要的信息。
真正的重定位过程,是在这个时间点来完成的:可执行程序、动态库被加载之后,调用可执行程序的入口函数之前。
只有当所有需要被重定位的符号被解决了之后,才能开始执行程序。
既然也是重定位,与静态链接过程一样:也需要把符号的目标地址填写到代码段中需要重定位的地方。
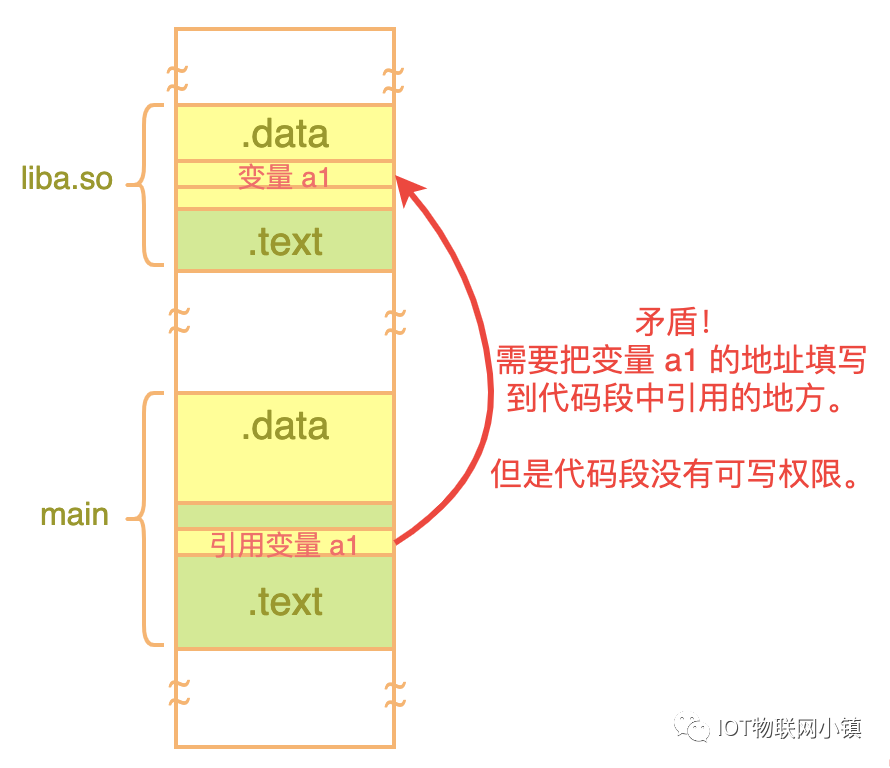
矛盾:代码段不可写
问题来了!
我们知道,在现代操作系统中,对于内存的访问是有权限控制的,一般来说:
代码段:可读、可执行;
数据段:可读、可写;
如果进行符号重定位,就需要对代码进行修改(填写符号的地址),但是代码段又没有可写的权限,这是一个矛盾!
解决这个矛盾的方案,就是Linux系统中动态链接器的核心工作!
解决矛盾:增加一层间接性
David Wheeler有一句名言:“计算机科学中的大多数问题,都可以通过增加一层间接性来解决。”
解决动态链接中的代码重定位问题,同样也可以通过增加一层间接性来解决。
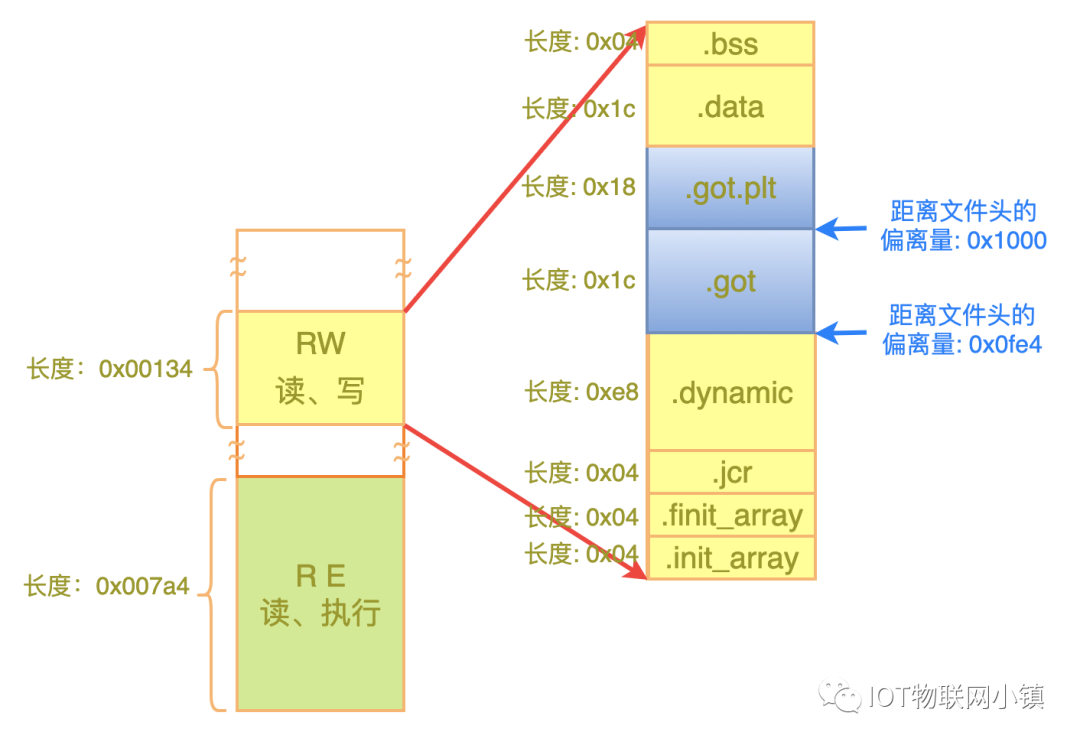
既然代码段在被加载到内存中之后不可写,但是数据段是可写的。
在代码段中引用的外部符号,可以在数据段中增加一个跳板:让代码段先引用数据段中的内容,然后在重定位时,把外部符号的地址填写到数据段中对应的位置,不就解决这个矛盾了吗?!
如下图所示:
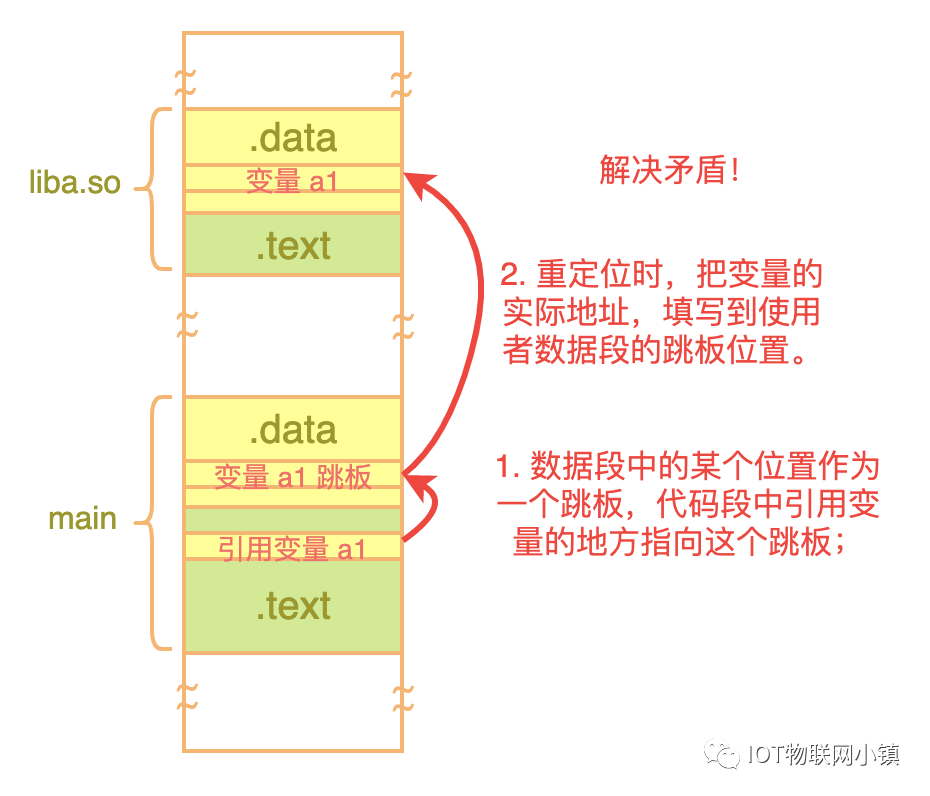
理解了上图的解决思路,基本上就理解了动态链接过程中重定位的核心思想。
示例代码
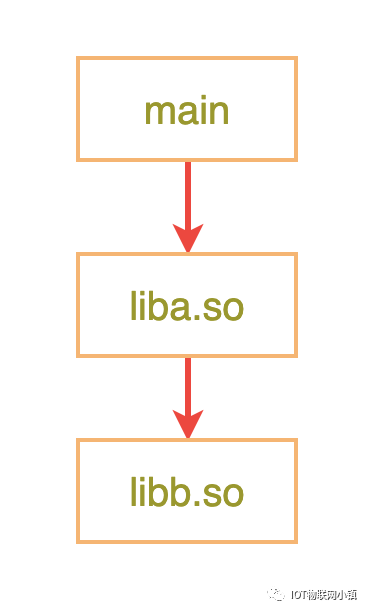
我们需要3个源文件来讨论动态链接中重定位的过程:main.c、a.c、b.c,其中的a.c和b.c被编译成动态库,然后main.c与这两个动态库一起动态链接成可执行程序。
它们之间的依赖关系是:
b.c
代码如下:
#include
int b = 30;
void func_b(void)
{
printf("in func_b. b = %d
", b);
}
代码说明:
定义一个全局变量和一个全局函数,被 a.c 调用。
a.c
代码如下(稍微复杂一些,主要是为了探索:不同类型的符号如何处理重定位):
#include
// 内部定义【静态】全局变量
static int a1 = 10;
// 内部定义【非静态】全局变量
int a2 = 20;
// 声明外部变量
extern int b;
// 声明外部函数
extern void func_b(void);
// 内部定义的【静态】函数
static void func_a2(void)
{
printf("in func_a2
");
}
// 内部定义的【非静态】函数
void func_a3(void)
{
printf("in func_a3
");
}
// 被 main 调用
void func_a1(void)
{
printf("in func_a1
");
// 操作内部变量
a1 = 11;
a2 = 21;
// 操作外部变量
b = 31;
// 调用内部函数
func_a2();
func_a3();
// 调用外部函数
func_b();
}
代码说明:
定义了 2 个全局变量:一个静态,一个非静态;
定义了 3 个函数:
func_a2是静态函数,只能在本文件中调用;
func_a1和func_a3是全局函数,可以被外部调用;
- 在 main.c 中会调用
func_a1。
main.c
代码如下:
#include
#include
#include
// 声明外部变量
extern int a2;
extern void func_a1();
typedef void (*pfunc)(void);
int main(void)
{
printf("in main
");
// 打印此进程的全局符号表
void *handle = dlopen(0, RTLD_NOW);
if (NULL == handle)
{
printf("dlopen failed!
");
return -1;
}
printf("
------------ main ---------------
");
// 打印 main 中变量符号的地址
pfunc addr_main = dlsym(handle, "main");
if (NULL != addr_main)
printf("addr_main = 0x%x
", (unsigned int)addr_main);
else
printf("get address of main failed!
");
printf("
------------ liba.so ---------------
");
// 打印 liba.so 中变量符号的地址
unsigned int *addr_a1 = dlsym(handle, "a1");
if (NULL != addr_a1)
printf("addr_a1 = 0x%x
", *addr_a1);
else
printf("get address of a1 failed!
");
unsigned int *addr_a2 = dlsym(handle, "a2");
if (NULL != addr_a2)
printf("addr_a2 = 0x%x
", *addr_a2);
else
printf("get address of a2 failed!
");
// 打印 liba.so 中函数符号的地址
pfunc addr_func_a1 = dlsym(handle, "func_a1");
if (NULL != addr_func_a1)
printf("addr_func_a1 = 0x%x
", (unsigned int)addr_func_a1);
else
printf("get address of func_a1 failed!
");
pfunc addr_func_a2 = dlsym(handle, "func_a2");
if (NULL != addr_func_a2)
printf("addr_func_a2 = 0x%x
", (unsigned int)addr_func_a2);
else
printf("get address of func_a2 failed!
");
pfunc addr_func_a3 = dlsym(handle, "func_a3");
if (NULL != addr_func_a3)
printf("addr_func_a3 = 0x%x
", (unsigned int)addr_func_a3);
else
printf("get address of func_a3 failed!
");
printf("
------------ libb.so ---------------
");
// 打印 libb.so 中变量符号的地址
unsigned int *addr_b = dlsym(handle, "b");
if (NULL != addr_b)
printf("addr_b = 0x%x
", *addr_b);
else
printf("get address of b failed!
");
// 打印 libb.so 中函数符号的地址
pfunc addr_func_b = dlsym(handle, "func_b");
if (NULL != addr_func_b)
printf("addr_func_b = 0x%x
", (unsigned int)addr_func_b);
else
printf("get address of func_b failed!
");
dlclose(handle);
// 操作外部变量
a2 = 100;
// 调用外部函数
func_a1();
// 为了让进程不退出,方便查看虚拟空间中的地址信息
while(1) sleep(5);
return 0;
}
纠正:代码中本来是想打印变量的地址的,但是不小心加上了 *,变成了打印变量值。最后检查的时候才发现,所以就懒得再去修改了。
代码说明:
利用 dlopen 函数(第一个参数传入 NULL),来打印此进程中的一些符号信息(变量和函数);
赋值给 liba.so 中的变量 a2,然后调用 liba.so 中的 func_a1 函数;
编译成动态链接库
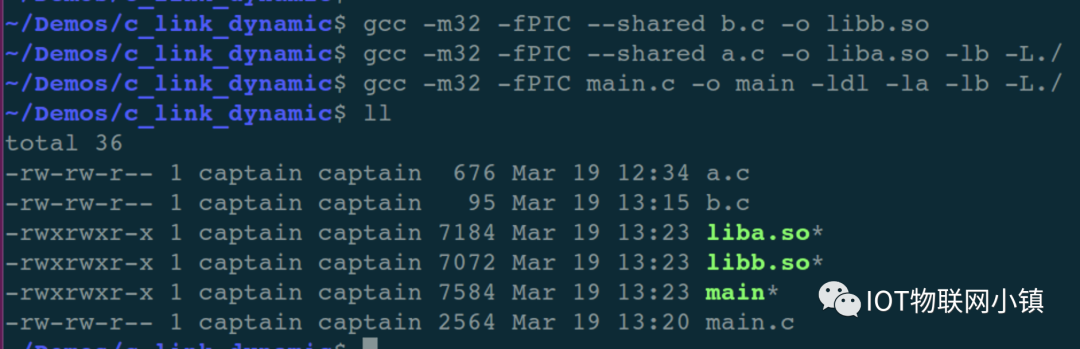
把以上几个源文件编译成动态库以及可执行程序:
$ gcc -m32 -fPIC --shared b.c -o libb.so
$ gcc -m32 -fPIC --shared a.c -o liba.so -lb -L./
$ gcc -m32 -fPIC main.c -o main -ldl -la -lb -L./
有几点内容说明一下:
-fPIC 参数意思是:生成位置无关代码(Position Independent Code),这也是动态链接中的关键;
既然动态库是在运行时加载,那为什么在编译的时候还需要指明?
因为在编译的时候,需要知道每一个动态库中提供了哪些符号。Windows 中的动态库的显性的导出和导入标识,更能体现这个概念(__declspec(dllexport), __declspec(dllimport))。
此时,就得到了如下几个文件:
动态库的依赖关系
对于静态链接的可执行程序来说,被操作系统加载之后,可以认为直接从可执行程序的入口函数开始(也就是ELF文件头中指定的e_entry这个地址),执行其中的指令码。
但是对于动态链接的程序来说,在执行入口函数的指令之前,必须把该程序所依赖的动态库加载到内存中,然后才能开始执行。
对于我们的实例代码来说:main程序依赖于liba.so库,而liba.so库又依赖于libb.so库。
可以用ldd工具来分别看一下动态库之间的依赖关系:


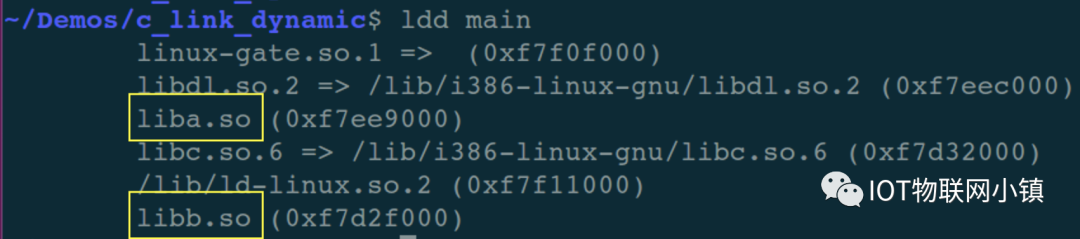
可以看出:
在 liba.so 动态库中,记录了信息:依赖于 libb.so;
在 main 可执行文件中,记录了信息:依赖于 liba.so, libb.so;
也可以使用另一个工具patchelf来查看一个可执行程序或者动态库,依赖于其他哪些模块。例如:

那么,动态库的加载是由谁来完成的呢?动态链接器!
动态库的加载过程
动态链接器加载动态库
当执行main程序的时候,操作系统首先把main加载到内存,然后通过.interp段信息来查看该文件依赖哪些动态库:
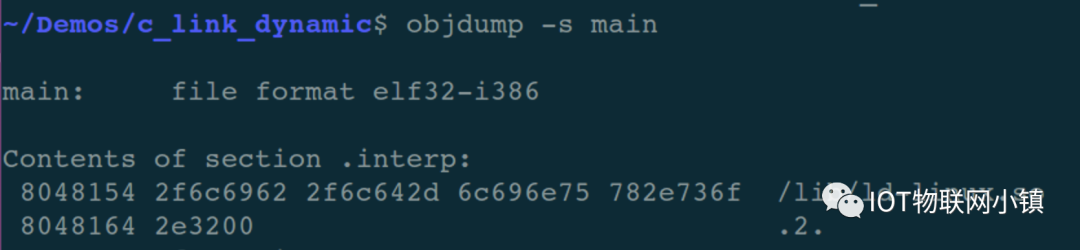
上图中的字符串/lib/ld-linux.so.2,就表示main依赖动态链接库。
ld-linux.so.2也是一个动态链接库,在大部分情况下动态链接库已经被加载到内存中了(动态链接库就是为了共享),操作系统此时只需要把动态链接库所在的物理内存,映射到 main进程的虚拟地址空间中就可以了,然后再把控制权交给动态链接器。
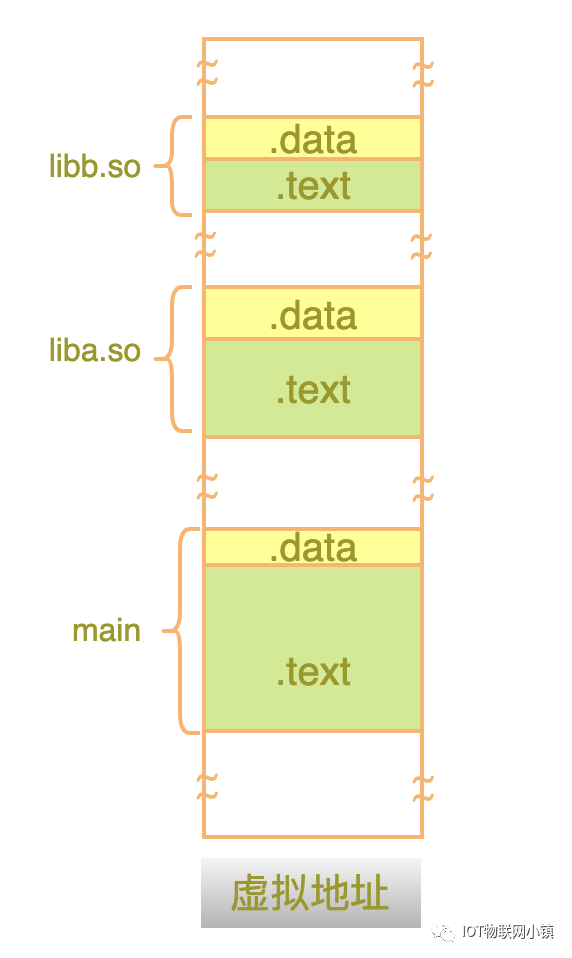
动态链接器发现:main依赖liba.so,于是它就在虚拟地址空间中找一块能放得下liba.so的空闲空间,然后把liba.so中需要加载到内存中的代码段、数据段都加载进来。
当然,在加载liba.so时,又会发现它依赖libb.so,于是又把在虚拟地址空间中找一块能放得下libb.so的空闲空间,把libb.so中的代码段、数据段等加载到内存中,示意图如下所示:
动态链接器自身也是一个动态库,而且是一个特殊的动态库:它不依赖于其他的任何动态库,因为当它被加载的时候,没有人帮它去加载依赖的动态库,否则就形成鸡生蛋、蛋生鸡的问题了。
动态库的加载地址
一个进程在运行时的实际加载地址(或者说虚拟内存区域),可以通过指令:$ cat /proc/[进程的 pid]/maps 读取出来。
例如:我的虚拟机中执行main程序时,看到的地址信息是:
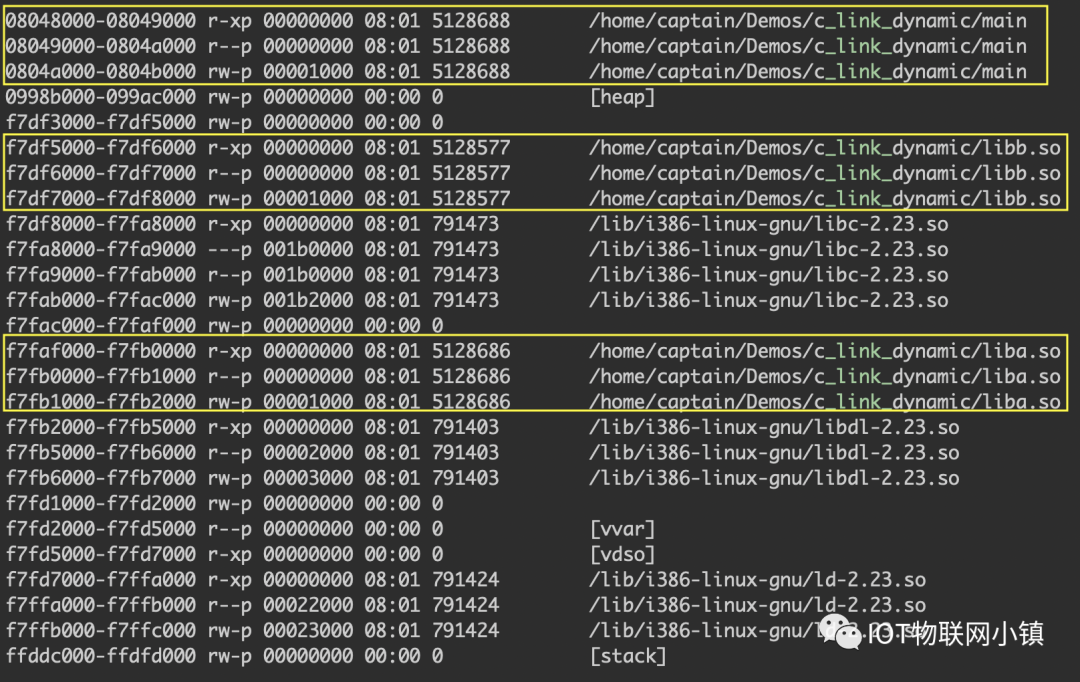
黄色部分分别是:main, liba.so, libb.so 这3个模块的加载信息。
另外,还可以看到c库(libc-2.23.so)、动态链接器(ld-2.23.so)以及动态加载库libdl-2.23.so的虚拟地址区域,布局如下:
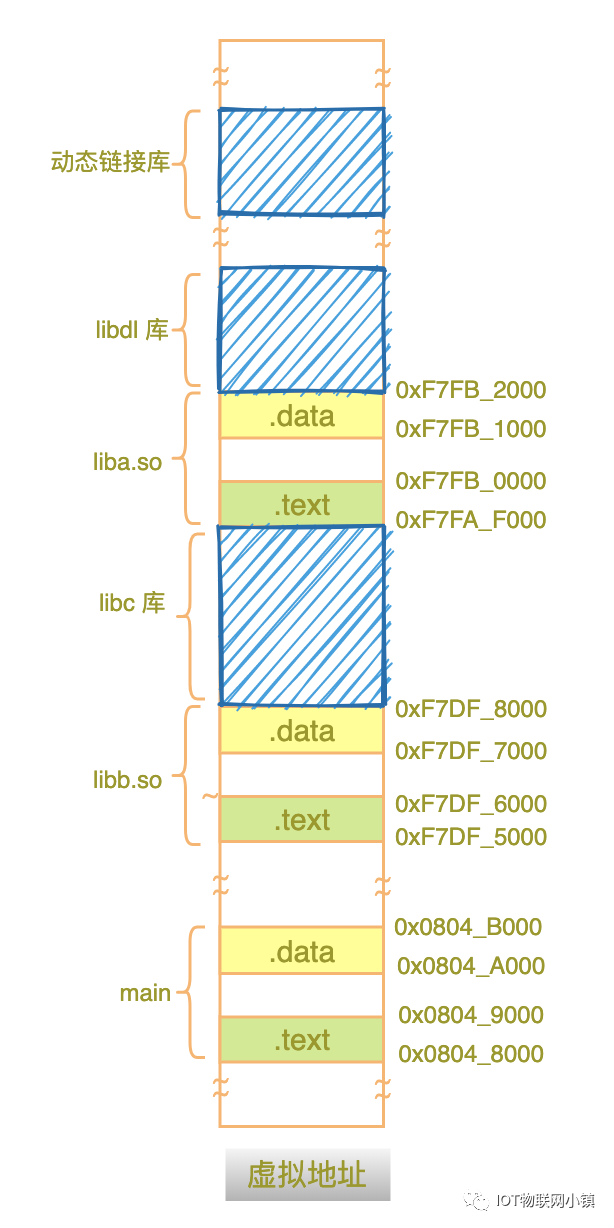
可以看出出来:
main可执行程序是位于低地址,所有的动态库都位于4G内存空间的最后1G空间中。
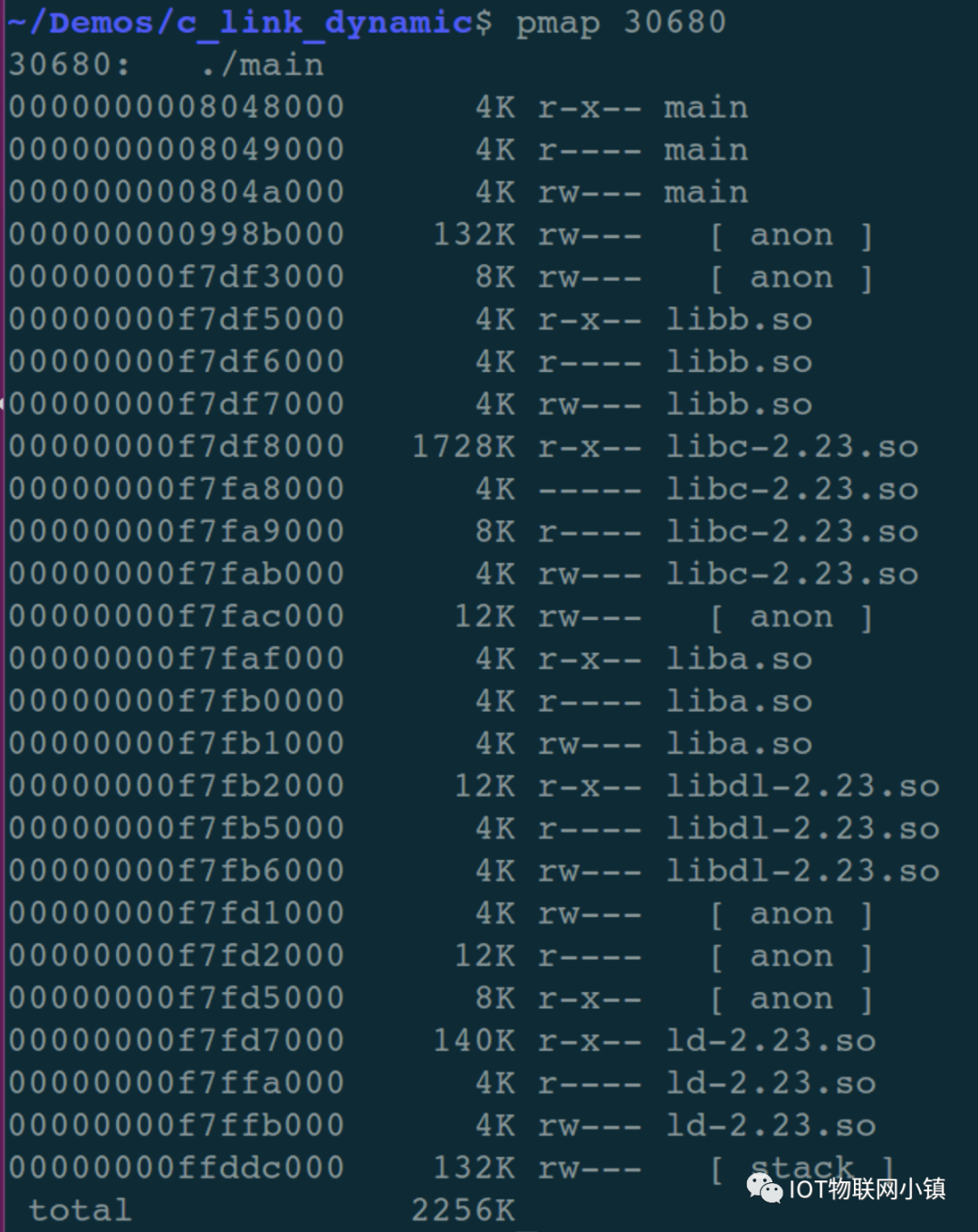
还有另外一个指令也很好用 $ pmap [进程的 pid],也可以打印出每个模块的内存地址:
符号重定位
全局符号表
在之前的静态链接中学习过,链接器在扫描每一个目标文件(.o文件)的时候,会把每个目标文件中的符号提取出来,构成一个全局符号表。
然后在第二遍扫描的时候,查看每个目标文件中需要重定位的符号,然后在全局符号表中查找该符号被安排在什么地址,然后把这个地址填写到引用的地方,这就是静态链接时的重定位。
但是动态链接过程中的重定位,与静态链接的处理方式差别就大很多了,因为每个符号的地址只有在运行的时候才能知道它们的地址。
例如:liba.so引用了libb.so中的变量和函数,而libb.so中的这两个符号被加载到什么位置,直到main程序准备执行的时候,才能被链接器加载到内存中的某个随机的位置。
也就是说:动态链接器知道每个动态库中的代码段、数据段被加载的内存地址,因此动态链接器也会维护一个全局符号表,其中存放着每一个动态库中导出的符号以及它们的内存地址信息。
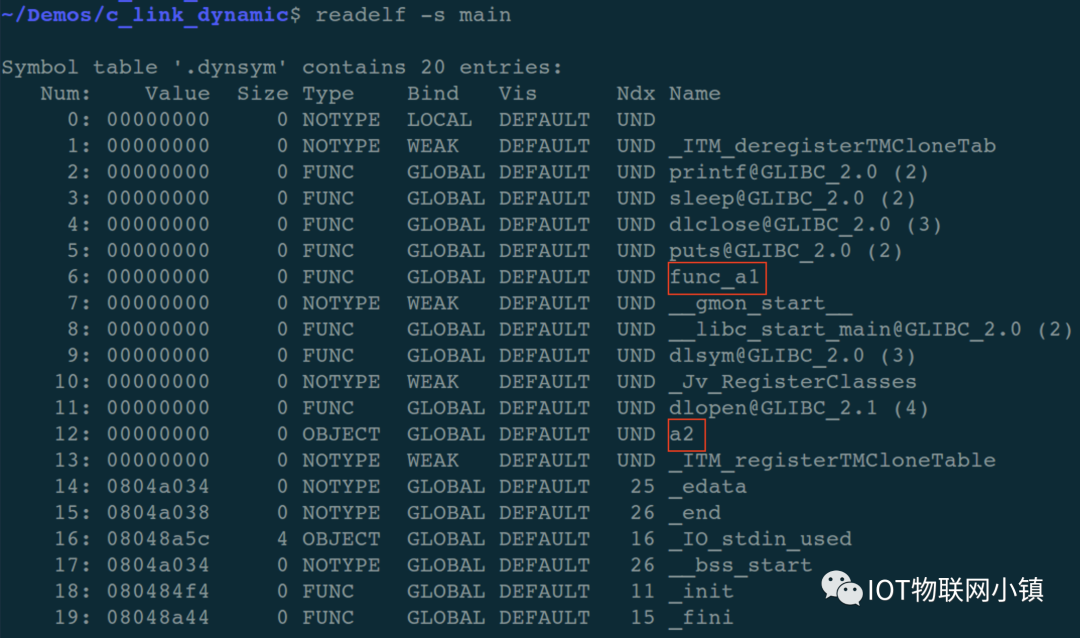
在示例代码main.c函数中,我们通过dlopen返回的句柄来打印进程中的一些全局符号的地址信息,输出内容如下:
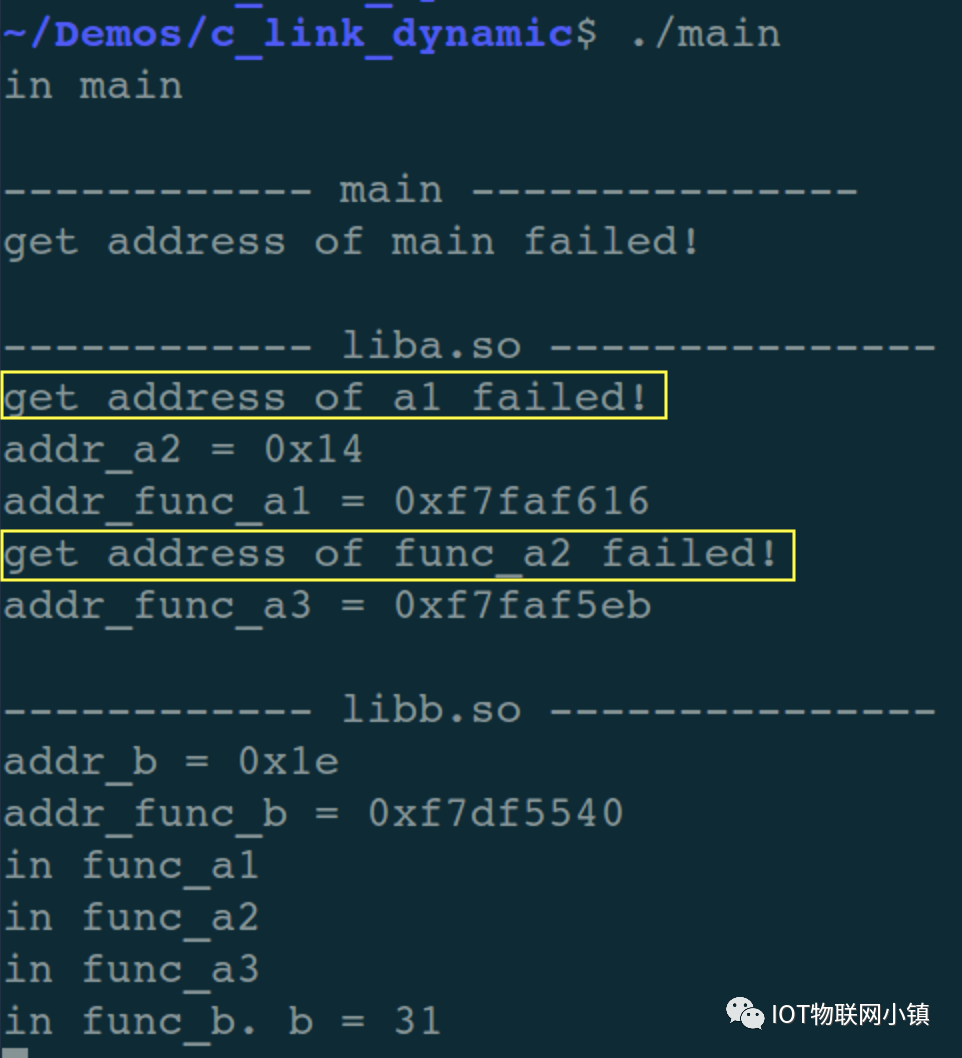
上文已经纠错过:本来是想打印变量的地址信息,但是 printf 语句中不小心加上了型号,变成了打印变量值。
可以看到:在全局符号表中,没有找到liba.so中的变量a1和函数func_a2这两个符号,因为它俩都是static类型的,在编译成动态库的时候,没有导出到符号表中。
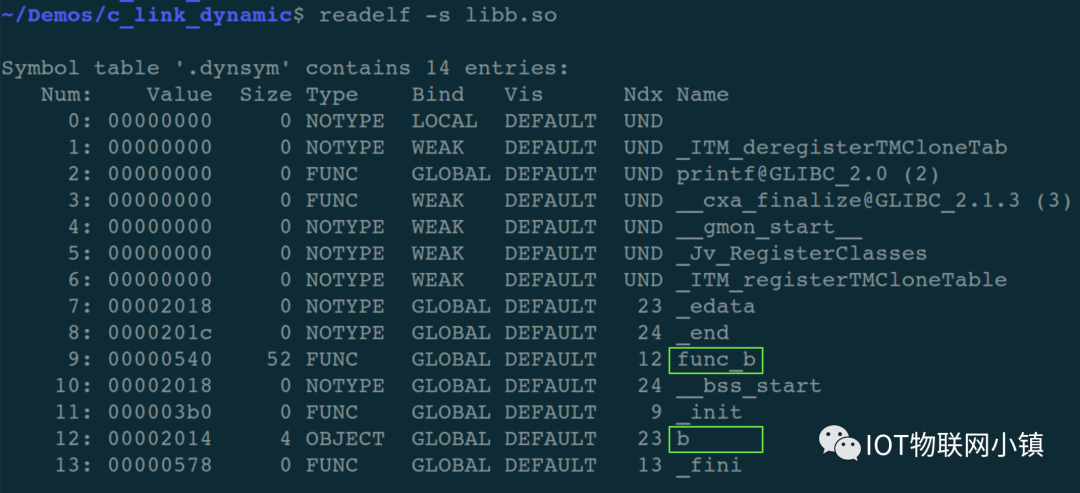
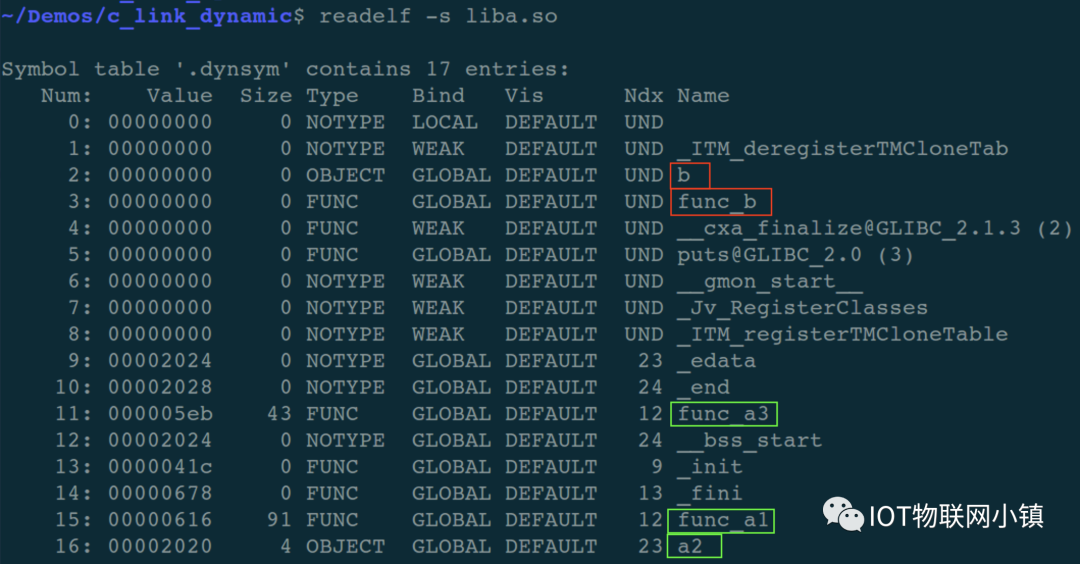
既然提到了符号表,就来看看这 3 个ELF文件中的动态符号表信息:
- 动态链接库中保护两个符号表:.dynsym(动态符号表: 表示模块中符号的导出、导入关系) 和 .symtab(符号表: 表示模块中的所有符号);
.symtab 中包含了 .dynsym;
- 由于图片太大,这里只贴出 .dynsym 动态符号表。
绿色矩形框前面的Ndx列是数字,表示该符号位于当前文件的哪一个段中(即:段索引);
红色矩形框前面的Ndx列是UND,表示这个符号没有找到,是一个外部符号(需要重定位);
全局偏移表GOT
在我们的示例代码中,liba.so是比较特殊的,它既被main可执行程序所依赖,又依赖于libb.so。
而且,在liba.so中,定义了静态、动态的全局变量和函数,可以很好的概况很多种情况,因此这部分内容就主要来分析liba.so这个动态库。
前文说过:代码重定位需要修改代码段中的符号引用,而代码段被加载到内存中又没有可写的权限,动态链接解决这个矛盾的方案是:增加一层间接性。
例如:liba.so的代码中引用了libb.so中的变量b,在liba.so的代码段,并不是在引用的地方直接指向libb.so数据段中变量b的地址,而是指向了liba.so自己的数据段中的某个位置,在重定位阶段,链接器再把libb.so中变量b的地址填写到这个位置。
因为liba.so自己的代码段和数据段位置是相对固定的,这样的话,liba.so的代码段被加载到内存之后,就再也不用修改了。
而数据段中这个间接跳转的位置,就称作:全局偏移表(GOT: Global Offset Table)。
划重点:
liba.so的代码段中引用了libb.so中的符号b,既然b的地址需要在重定位时才能确定,那么就在数据段中开辟一块空间(称作:GOT表),重定位时把b的地址填写到GOT表中。
而liba.so的代码段中,把GOT表的地址填写到引用b的地方,因为GOT表在编译阶段是可以确定的,使用的是相对地址。
这样,就可以在不修改liba.so代码段的前提下,动态的对符号b进行了重定位!
其实,在一个动态库中存在 2 个GOT表,分别用于重定位变量符号(section名称:.got)和函数符号( section 名称:.got.plt)。
也就是说:所有变量类型的符号重定位信息都位于.got中,所有函数类型的符号重定位信息都位于.got.plt中。
并且,在一个动态库文件中,有两个特殊的段(.rel.dyn和.rel.plt)来告诉链接器:.got和.got.plt这两个表中,有哪些符号需要进行重定位,这个问题下面会深入讨论。
liba.so动态库文件的布局
为了更深刻的理解.got和.got.plt这两个表,有必要来拆解一下liba.so动态库文件的内部结构。
通过readelf -S liba.so指令来看一下这个ELF文件中都有哪些section:
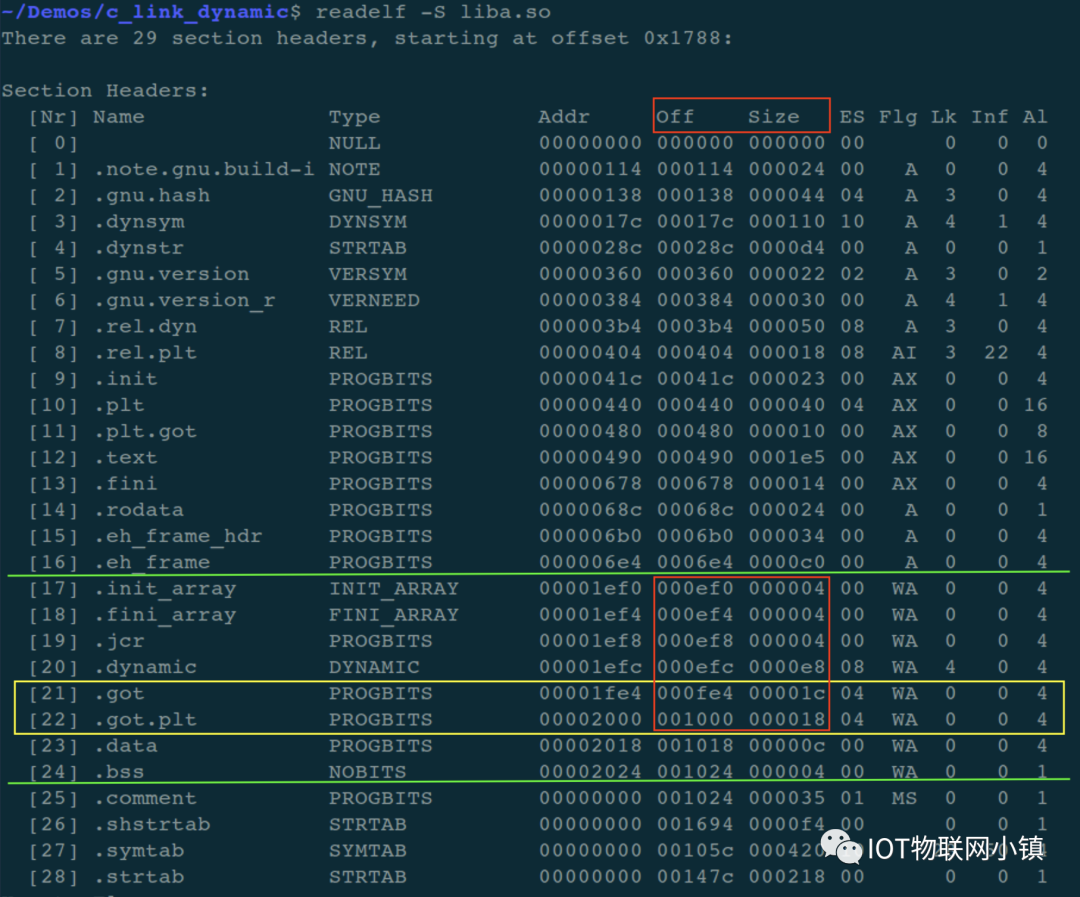
可以看到:一共有28个section,其中的21、22就是两个GOT表。
另外,从装载的角度来看,装载器并不是把这些sections分开来处理,而是根据不同的读写属性,把多个section看做一个segment。
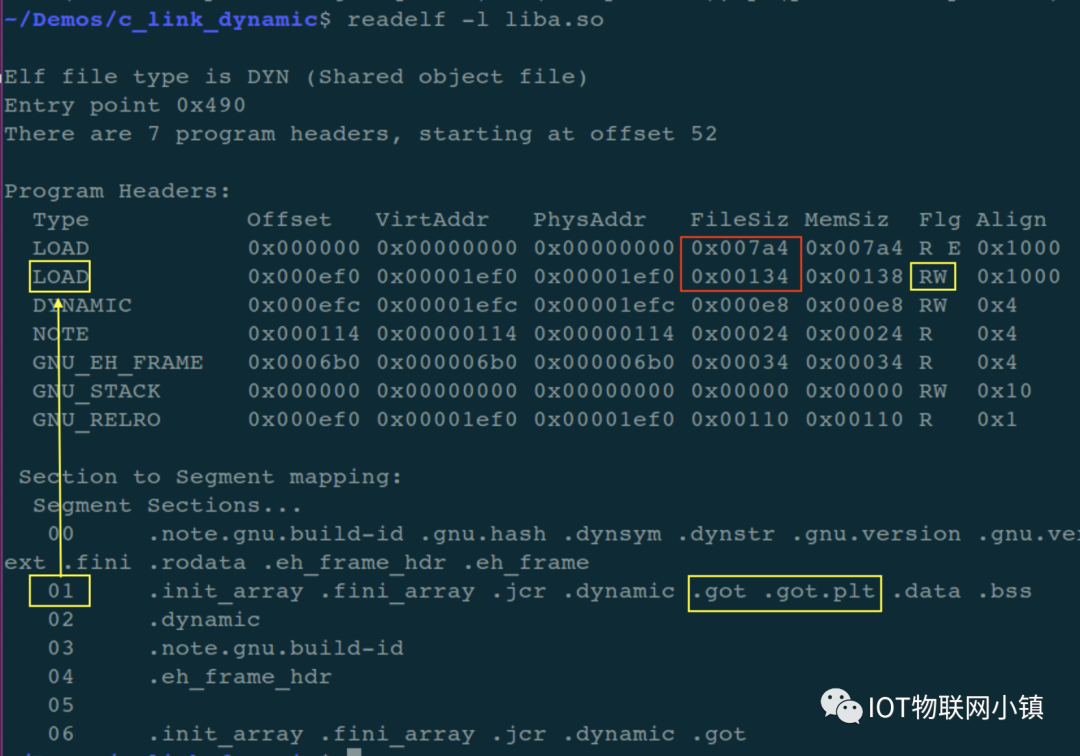
再次通过指令 readelf -l liba.so ,来查看一下segment信息:
也就是说:
这28个section中(关注绿色线条):
section 0 ~ 16 都是可读、可执行权限,被当做一个 segment;
section 17 ~ 24 都是可读、可写的权限,被动作另一个 segment;
再来重点看一下.got和.got.plt这两个section(关注黄色矩形框):
可见:.got和.got.plt与数据段一样,都是可读、可写的,所以被当做同一个 segment被加载到内存中。
通过以上这2张图(红色矩形框),可以得到liba.so动态库文件的内部结构如下:
liba.so动态库的虚拟地址
来继续观察liba.so文件segment信息中的AirtAddr列,它表示的是被加载到虚拟内存中的地址,重新贴图如下:
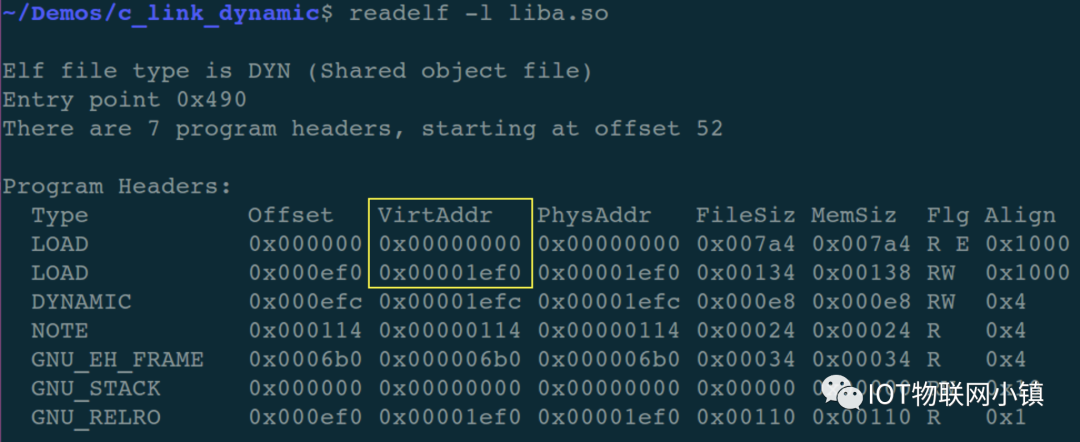
因为编译动态库时,使用了代码位置无关参数(-fPIC),这里的虚拟地址从0x0000_0000开始。
当liba.so的代码段、数据段被加载到内存中时,动态链接器找到一块空闲空间,这个空间的开始地址,就相当于一个基地址。
liba.so中的代码段和数据段中所有的虚拟地址信息,只要加上这个基地址,就得到了实际虚拟地址。
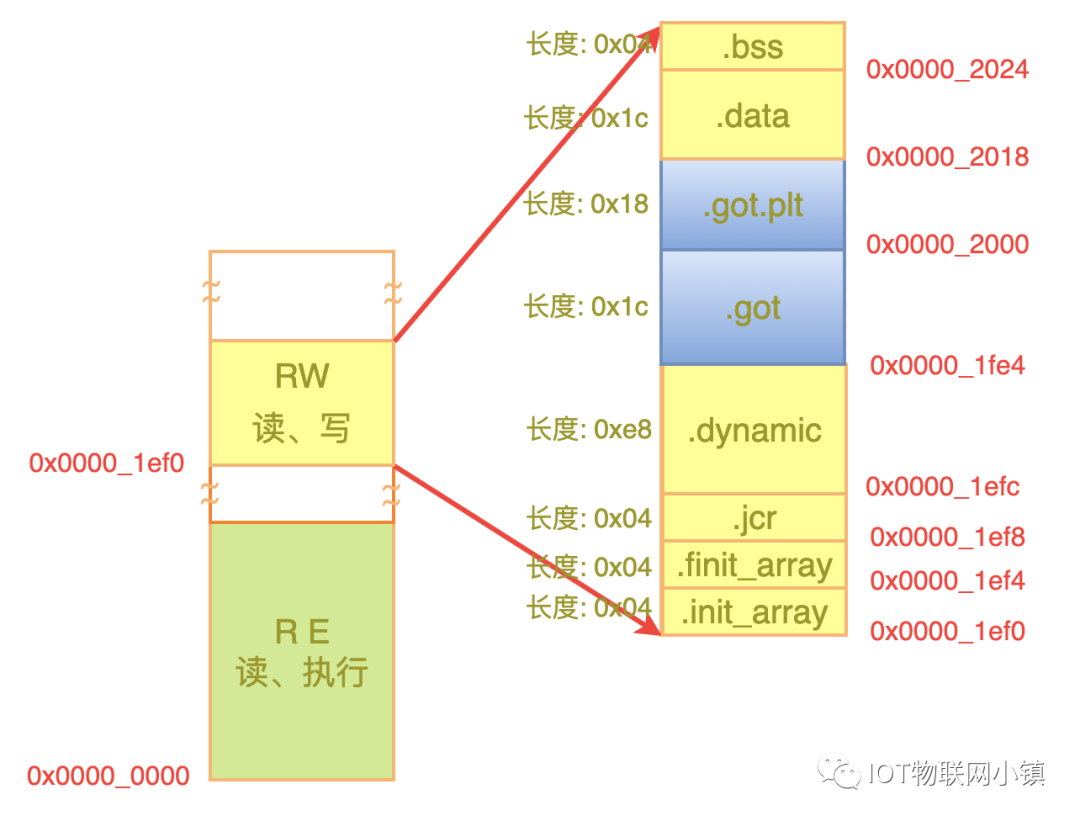
我们还是把上图中的输出信息,画出详细的内存模型图,如下所示:
GOT表的内部结构
现在,我们已经知道了liba.so库的文件布局,也知道了它的虚拟地址,此时就可以来进一步的看一下.got和.got.plt这两个表的内部结构了。
从刚才的图片中看出:
.got 表的长度是 0x1c,说明有 7 个表项(每个表项占 4 个字节);
.got.plt 表的长度是 0x18,说明有 6 个表项;
上文已经说过,这两个表是用来重定位所有的变量和函数等符号的。
那么:liba.so通过什么方式来告诉动态链接器:需要对.got和.got.plt这两个表中的表项进行地址重定位呢?
在静态链接的时候,目标文件是通过两个重定位表.rel.text和.rel.data这两个段信息来告诉链接器的。
对于动态链接来说,也是通过两个重定位表来传递需要重定位的符号信息的,只不过名字有些不同:.rel.dyn和.rel.plt。
通过指令 readelf -r liba.so来查看重定位信息:
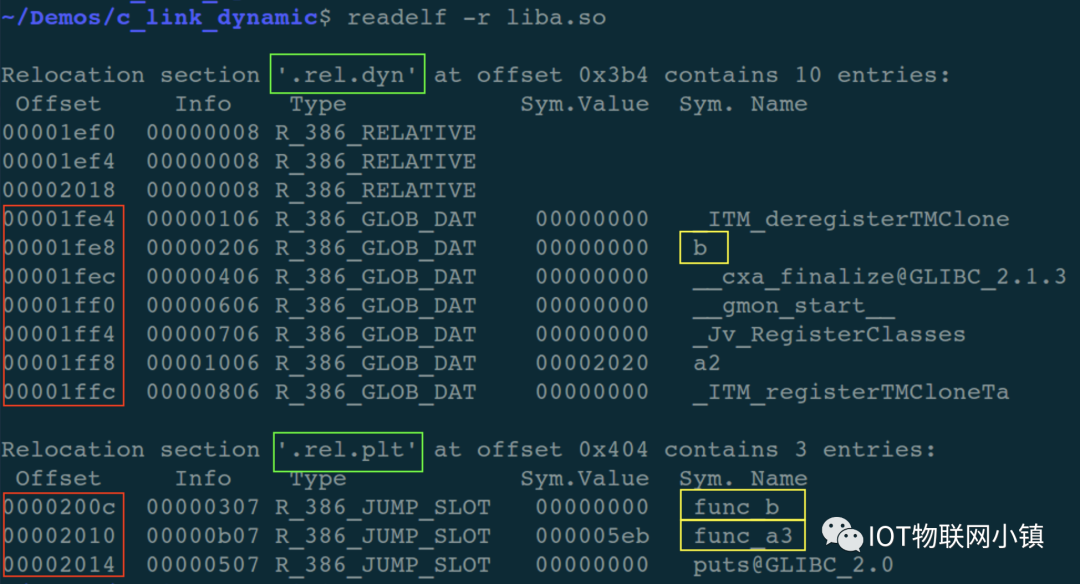
从黄色和绿色的矩形框中可以看出:
liba.so 引用了外部符号 b,类型是 R_386_GLOB_DAT,这个符号的重定位描述信息在 .rel.dyn 段中;
liba.so 引用了外部符号 func_b, 类型是 R_386_JUMP_SLOT,这个符号的重定位描述信息在 .rel.plt 段中;
从左侧红色的矩形框可以看出:每一个需要重定位的表项所对应的虚拟地址,画成内存模型图就是下面这样:
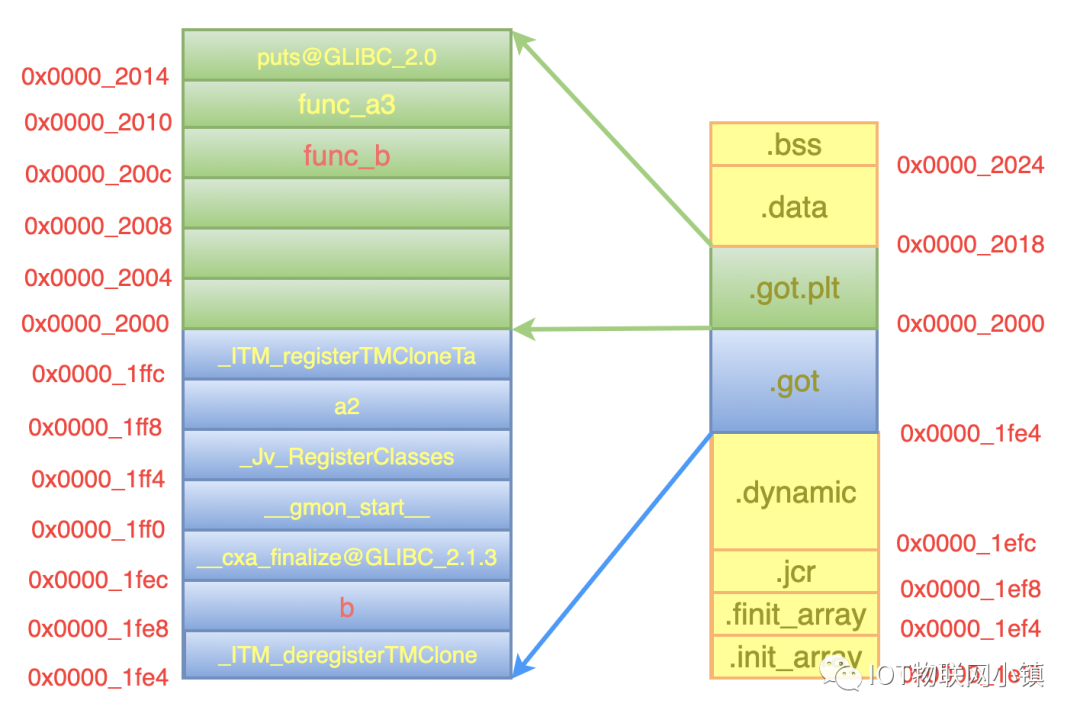
暂时只专注表项中的红色部分:.got表中的b, .got.plt表中的func_b,这两个符号都是libb.so中导出的。
也就是说:
liba.so的代码中在操作变量b的时候,就到.got表中的0x0000_1fe8这个地址处来获取变量b的真正地址;
liba.so的代码中在调用func_b函数的时候,就到.got.plt表中的0x0000_200c这个地址处来获取函数的真正地址;
反汇编liba.so代码
下面就来反汇编一下liba.so,看一下指令码中是如何对这两个表项进行寻址的。
执行反汇编指令:$ objdump -d liba.so,这里只贴出func_a1函数的反汇编代码:
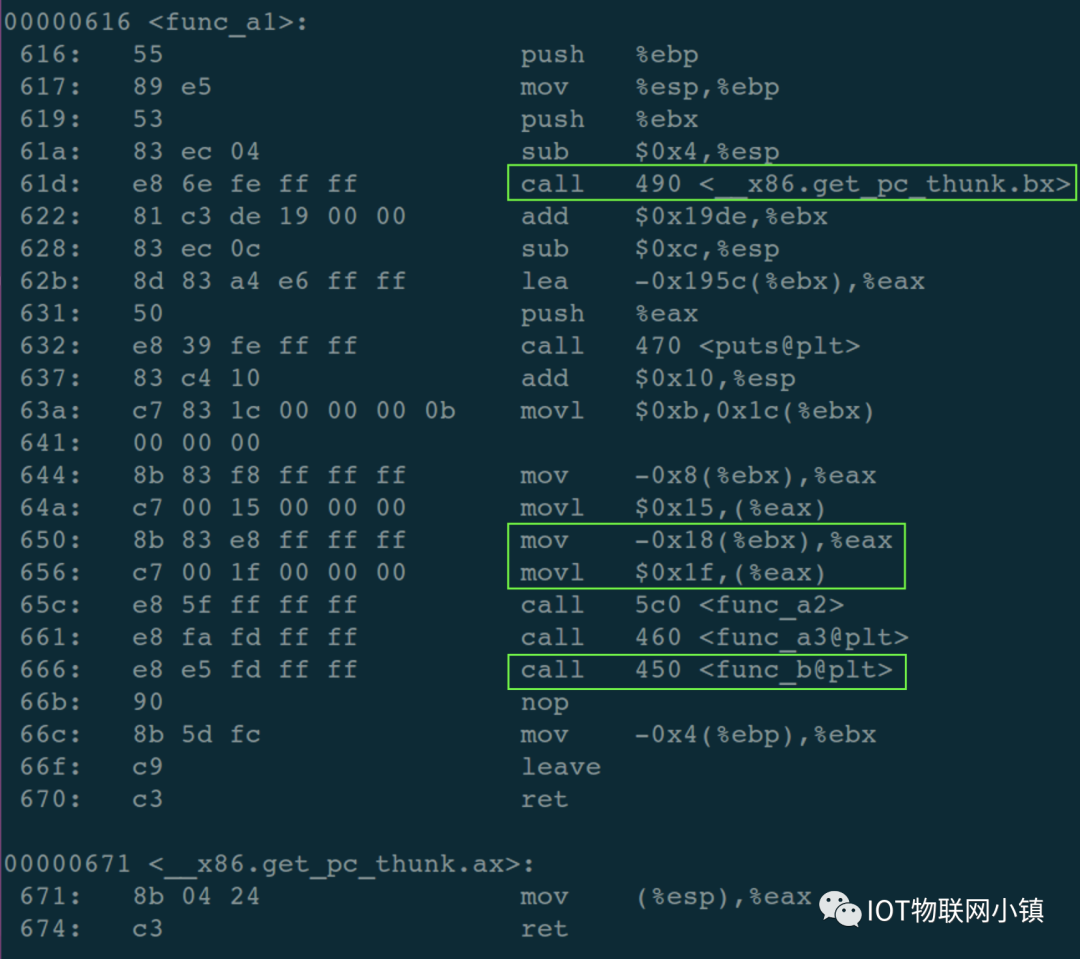
第一个绿色矩形框(call 490 <__x86.get_pc_thunk.bx>)的功能是:把下一条指令(add)的地址存储到%ebx中,也就是:
%ebx = 0x622
然后执行: add $0x19de,%ebx,让%ebx加上0x19de,结果就是:%ebx = 0x2000。
0x2000正是.got.plt表的开始地址!
看一下第2个绿色矩形框:
mov -0x18(%ebx),%eax: 先用%ebx减去0x18的结果,存储到%eax中,结果是:%eax = 0x1fe8,这个地址正是变量b在.got表中的虚拟地址。
movl $0x1f,(%eax):在把0x1f(十进制就是31),存储到0x1fe8表项中存储的地址所对应的内存单元中(libb.so的数据段中的某个位置)。
因此,当链接器进行重定位之后,0x1fe8表项中存储的就是变量b的真正地址,而上面这两步操作,就把数值31赋值给变量b了。
第3个绿色矩形框,是调用函数func_b,稍微复杂一些,跳转到符号 func_b@plt的地方,看一下反汇编代码:

jmp指令调用了%ebx + 0xc处的那个函数指针,从上面的.got.plt布局图中可以看出,重定位之后这个表项中存储的正是func_b函数的地址(libb.so中代码段的某个位置),所以就正确的跳转到该函数中了。
审核编辑 :李倩
-
数据
+关注
关注
8文章
7049浏览量
89089 -
代码
+关注
关注
30文章
4791浏览量
68659 -
动态链接
+关注
关注
0文章
5浏览量
5752
原文标题:Linux 动态链接过程中的【重定位】底层原理
文章出处:【微信号:LinuxHub,微信公众号:Linux爱好者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深入探讨Linux系统中的动态链接库机制

安泰:高压放大器在金属材料的静电悬浮过程中的应用
焊接过程可视化的应用前景有哪些
一种半动态环境中的定位方法

激光锡膏和普通锡膏在焊接过程中有哪些区别?

嵌入式学习-静态链接和动态链接
SMT焊接过程中,锡膏管控要点有哪些?

e² studio中链接脚本的修改指导

解析经典蓝牙设备连接过程
焊接过程视觉监控技术的应用与挑战

焊接过程分析系统






 工商网监
工商网监
评论