 PWM控制电机速度的基本原理
PWM控制电机速度的基本原理
做STM32智能小车的实验中会用到定时器PWM输出,来改变直流电机的转速。分享本文了解如何通过PWM实现对电机速度的控制。
PWM控制电机速度的基本原理
PWM(Pulse Width Modulation),也就是脉冲宽度调制。
PWM中有一个比较重要的概念,占空比:是一个脉冲周期内有效电平在整个周期所占的比例。
为了实现IO口上电压的持续性变化,可以调节PWM的占空比。这也能够使外设的功率进行持续性变化,最终控制直流电机转速的快慢。如何调节PWM波形的输出就是重点。相关推荐:STM32中PWM的配置与应用详解。
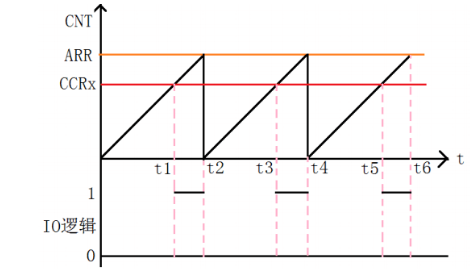
上图中的ARR是我们给定时器的一个预装载值,CCRx的上下变化是产生PWM波的关键。我们假设ARR大于CCRx的部分输出为高电平(即t1-t2、t3-t4、t5-t6),ARR小于CCRx的部分输出为低电平(即0-t1、t2-t3、t4-t5),则改变CCRx的值就能改变输出PWM的占空比。因此,想要控制PWM的输出波形,重要的就是如何设置ARR与CCRx这两个寄存器的值了。
STM32定时器中断
为了便于理解接下来关于PWM应用的内容,先插一段定时器中断的知识。
产生定时中断是定时器的用法之一,与定时器用来进行PWM输出和输入捕获相比,定时器中断更容易理解、掌握。
原理简介
使用通用定时器进行中断的原理,其实和开发板Systick定时器进行中断延时很相似(Stm32入门——Systick定时器),即:用psc(预分频系数)设置好定时器时钟后,arr(预装载值)在每个时钟周期内减1,当arr减为0时触发中断然后进入中断处理程序进行中断处理。以下代码为例:
void TIM3_Int_Init(u16 arr,u16 psc){ RCC->APB1ENR|=1<<1; //TIM3时钟使能 TIM3->ARR=arr; //设定计数器自动重装值 TIM3->PSC=psc; //预分频器设置 TIM3->DIER|=1<<0; //允许更新中断 TIM3->CR1|=0x01; //使能定时器3 MY_NVIC_Init(1,3,TIM3_IRQn,2);//抢占1,子优先级3,组2 }
RCC->APB1ENR|=1<<1
解释一下上面这行代码,由于定时器3(TIM3)是挂在APB1上的外设,所以要打开APB1,这里的预分频器值psc是来设置TIM3的时钟频率的,如果系统时钟(SYSTICK)频率为72MHz、psc为7199,则TIM3的时钟频率就为:
72MHz/(7199+1)Hz = 10KHz //这里的“+1”是手册中规定的。
10KHz是什 么意思呢?就是一秒钟会产生10K个周期,那么一个周期的时间长度就是1/10KHz,如果你想将定时器中断的时间间隔设置为0.5秒,那么你将arr设置为5000即可,因为arr每减1就需要一个周期的时间,减5000次就经过了5000*(1/10KHz)=0.5秒。
TIM3->DIER|=1<<0
再解释下上面这一行,设置允许更新中断,即arr减到0以后可以触发更新中断,还有其他类型的中断。
MY_NVIC_Init(1,3,TIM3_IRQn,2);//抢占1,子优先级3,组2
看上面这行代码,中断优先级有抢占优先级和响应(即子优先级)优先级两种,抢占优先级即:若程序1正在使用CPU,这时如果程序2要求使用CPU,并且程序2的抢占优先级高,则CPU被程序2抢占;若两者抢占优先级相同,则就算程序2的响应优先级高于程序1,CPU也不能被抢占;若程序1正在使用CPU,程序2和程序3的抢占优先级等于或低于程序1,且程序2的响应优先级高于程序三,则待CPU空出后,程序2先运行,程序3最后运行。TIM3_IRQn是指定将要运行的中断处理程序号。“组2”是设置中断优先级分组的,这是因为寄存器提供了四位来设置优先级,组2代表的是前两位给抢占优先级,后两位给响应优先级。
PWM模式、有效电平
前面介绍完中断,再说一下PWM工作原理。相关文章:浅析PWM控制电机转速的原理。
假设上图中ARR大于CCRx时输出为高电平,ARR小于CCRx时输出为低电平,但在实际运用中可能并非如此,有可能是相反的情况——ARR大于CCRx时输出为低电平,ARR小于CCRx时输出为高电平,至于到底是哪种情况,还要看PWM是哪种模式、有效电平又设置的是何种极性了。
模式1:ARR小于CCRx时输出为“有效”电平,ARR大于CCRx时输出为“无效”电平。
模式2:ARR小于CCRx时输出为“无效”电平,ARR大于CCRx时输出为“有效”电平。
这里说的是“有效”和“无效”,而不是“高”和“低”,也就是说有效电平可高可低,并非一定就是高电平。PWM模式、效电平极性,需要程序员自己配置相关的寄存器来实现。通过下面的代码来讲解。
TIM1_PWM_Init(899,0);//不分频。PWM频率=72000/(899+1)=80Khz
上一小节讲过关于定时器参数的设置。使用定时器1的通道1来输出一路PWM波,这里的899设置的就是ARR的值,至于那个0是用来设置TIM1的频率的,不分频就代表TIM1的时钟频率和系统时钟相同,这里假设为72MHz。
void TIM1_PWM_Init(u16 arr,u16 psc){ //此部分需手动修改IO口设置 RCC->APB2ENR|=1<<11; //TIM1时钟使能 GPIOA->CRH&=0XFFFFFFF0; //PA8清除之前的设置 GPIOA->CRH|=0X0000000B; //复用功能输出
TIM1->ARR=arr; //设定计数器自动重装值 TIM1->PSC=psc; //预分频器设置
TIM1->CCMR1|=7<<4; //CH1 PWM2模式 TIM1->CCMR1|=1<<3; //CH1预装载使能 TIM1->CCER|=0<<1; //OC1 输出使能 //TIM1->CCER|=1<<1;
TIM1->BDTR|=1<<15; //MOE 主输出使能
TIM1->CR1=0x0080; //ARPE使能 TIM1->CR1|=0x01; //使能定时器1 }
下文具体分析上面的代码。
前面4-6行是用来配置GPIO口的。
TIM1->ARR=arr; //设定计数器自动重装值TIM1->PSC=psc; //预分频器设置
这两行就是我上门提到的设置定时器的频率和重装载值。
TIM1->CCMR1|=7<<4; //CH1 PWM2模式TIM1->CCMR1|=1<<3; //CH1预装载使能TIM1->CCER|=0<<1; //OC1 输出使能
这三行是用来设置PWM输出模式和设置通道的,通道是什么呢?简单地讲就是输出PWM波的GPIO口,代码一开始不是设置了PA8这个GPIO口嘛,这个PA8就是通道1。使用通道的话要先进行输入输出方向、通道使能的设置。
TIM1->CCER|=1<<1;
这行代码是用来设置“有效电平”极性的,根据手册,当TIM1->CCER[1]这位置1时,有效电平为低电平,置0时有效电平为高电平,而默认情况下置0。
TIM1->BDTR|=1<<15; //MOE 主输出使能
这行代码只要对高级定时器进行设置,普通定时器无需设置。
TIM1->CR1=0x0080; //ARPE使能
这行代码是用来使能ARPE,ARPE是什么呢,就是当它被置1时,你自己设置的CCRx会立即生效,如果它被置为0,那么你自己设置的CCRx值不会立即生效(可能之前ARPE已经有值了),而是当之前设置的CCRx生效后才会使用你最新设置的CCRx值。
上面的代码里没有对CCRx进行设置,这是因为CCRx常常是一个变化的值,你可以在主函数中用一个for循环+if判断语句对它进行++或–的操作,从而达到连续改变CCRx值得目的,例如:
for(i=0;i<300;i++){ TIM1->CCR1=i;if(i==300){ i=0; }}
PWM波的周期是由定时器时钟频率和预装载值两者决定的,预装载值就是ARR。
预装载值PSC设置为899,那么,当定时器的当前值val从0增加到899时,一共经过了900个时钟周期,这900个时钟周期会产生一个PWM波形,也就是说900个定时器时钟周期才相当于一个PWM周期,那么PWM的频率就为72MHz/900=80KHz,周期为1/80KHz。
审核编辑 :李倩
-
直流电机
+关注
关注
36文章
1710浏览量
70238 -
PWM
+关注
关注
114文章
5193浏览量
214212 -
电机
+关注
关注
142文章
9041浏览量
145741
原文标题:STM32通过PWM控制电机速度
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论