 基于IR2127的电机驱动芯片
基于IR2127的电机驱动芯片

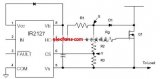
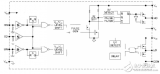
通过datasheet我们知道这是一款单通道具有电流检测功能的驱动芯片,是高端驱动即上桥臂MOS管驱动,需要外接自举二极管,IR2121则是低端驱动即下桥臂MOS管驱动,无需外接二极管。IR2125和IR2121分别配成上桥臂和下桥臂驱动控制,因为他们有同样的驱动电流可达1A,而IR2127只有200mA,跟他配对的下桥臂驱动芯片没有找到,所以我用了IR2127既作上桥臂驱动也作为下桥臂驱动。他的典型应用如下图所示;IR2128和IR2127差不多,只是输出与输入脉冲方向相反而已。
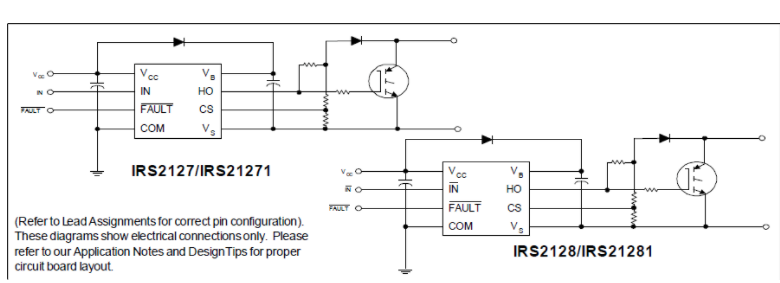
它是非隔离型,一般应用于低压驱动场合,如果需要应用到高压驱动,必须加隔离电路才行,尽管它的VB,VS耐压高达625V.用于电机驱动的是型号IR2127,VCC与COM端电压一般在12V到20V之间。起初设计电压在12.5V左右,在经过自举二极管后
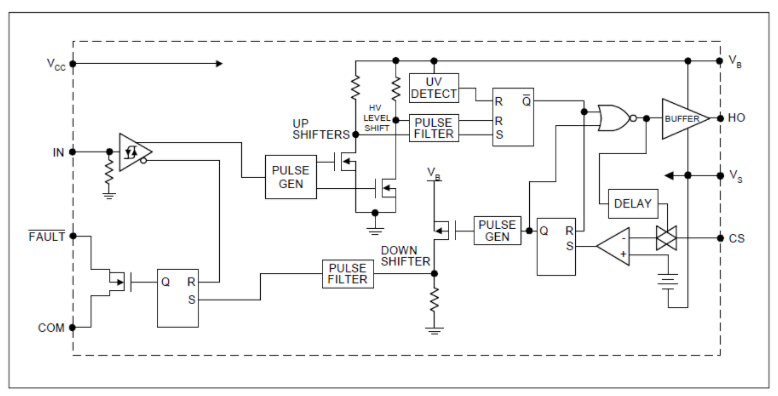
到VB端的电压小于VS+12V,导致芯片老是检测到硬件过流信号,从而不能正常驱动MOS管,后将VCC电压提升到13.5V后,驱动芯片才正常。CS脚就是用来检测过流信号的,原理就是当输入IN脚为高电平时,芯片正常工作时输出HO脚即为高,驱动后面的MOS管导通,当流过MOS管电流ID越大,则Uds=Id*Rd就越大,Uds减去二极管的压降得到的电压再经过两个电阻分压即是CS脚的电压,只要调整分压电阻阻值就可以限定最大ID,如果是CS脚电压大于0.25V,则最大延时360ns关闭HO脚输出,同时最大延时510ns置位FAULT脚,注意该脚是开漏输出,外部需要接上拉电阻,正常时为高电平,过流报警后输出为低电平。大家可以看下驱动芯片内部框图如下所示。
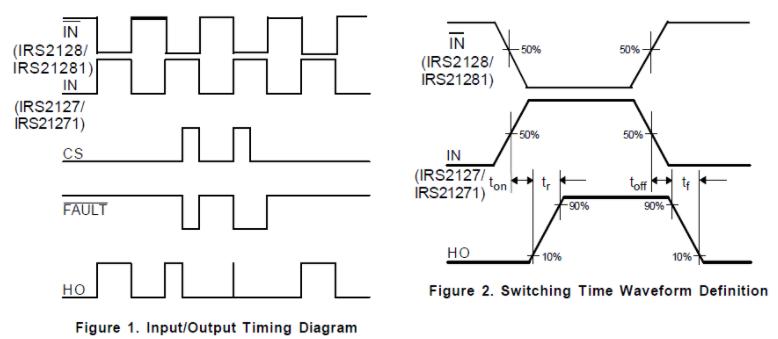
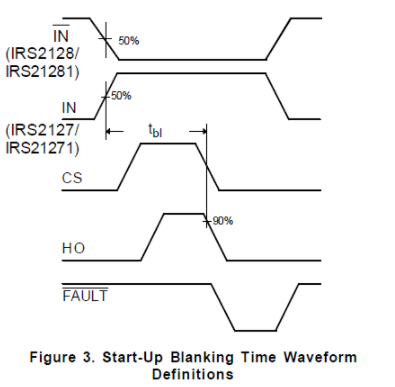
然后我们可以看下芯片逻辑时序图,通过时序图我们就知道IR2127和IR2128的区别了,IR2128输入为低电平时输出为高电平,而IR2127输入为高则输出也是高电平,然后看下CS脚,正常时为电平时,FAULT脚为高电平,一旦检测到过流则为高电平,FAULT脚也马上变为低电平,同时HO脚输出关断,保护后面器件不被烧坏。在芯片正常工作时,输入信号触发到输出信号的生成延时是非常短的,其中开启延时最大为ton+tr=200+130=330ns;关断延时最大为toff+tf=200+65=265ns.值得注意的是,该芯片启动消隐时间波形,这个很重要,芯片正常启动是CS脚会拉高一下,同时FAULT脚也会同时变低,启动消隐时间最大为Tbl=950ns,MCU在检测FAULT脚时需要避开这段时间,否则会引起系统误操作。
启动消隐时间波形
之前说过与该作下桥臂的驱动芯片,官网也没有找到,但是datasheet中有提到该芯片既可以做上桥臂也可以作为下桥臂使用(The floating channel can be used to drive an N-channel power MOSFET or IGBT in the high-side or low-side
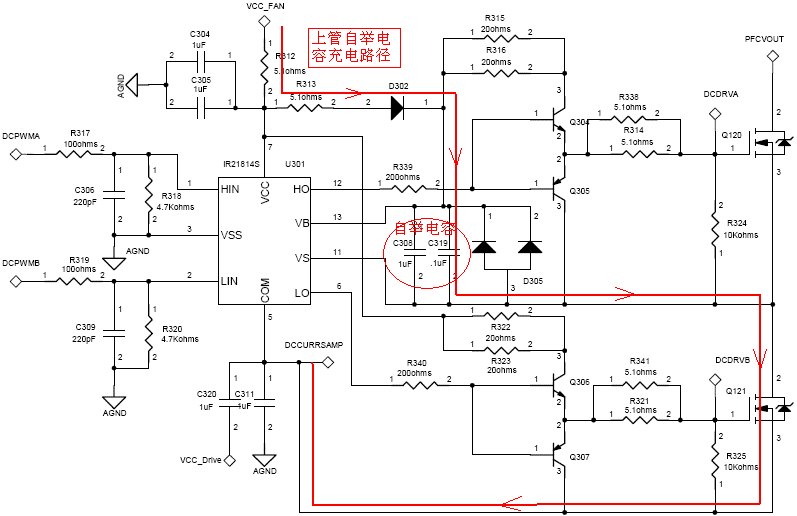
configuration which operates up to 600 V.),如果用它来设计下桥臂,由于下桥臂无需自举二极管,设计驱动电路时,其他和上桥臂保持一致,只是将自举二极管改为0欧姆电阻替代。电路原理设计如下所示。
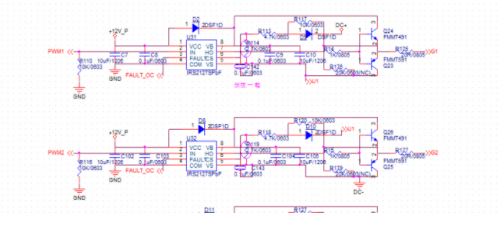
经过实际电路测试,改进的电路稳定可以行,已经成功应用在产品中。
-
二极管
+关注
关注
149文章
10469浏览量
179712 -
MOS管
+关注
关注
111文章
2816浏览量
78026
发布评论请先 登录
IR2110功率驱动集成芯片应用
IR2127/IR2128典型接线图
直流电机的IR2110驱动控制设计及DSP实现
EVAL-ADP2127 EVAL-ADP2127评估板
基于IR2136的无刷直流电机驱动电路的设计

非隔离驱动芯片IR21814S的电路设计



评论