 如何制作一个宠物机器人
如何制作一个宠物机器人
我一直想要一个宠物机器人——一个可以跑来跑去并能自己照顾自己的宠物,机器人宠物就是个不错的选择。
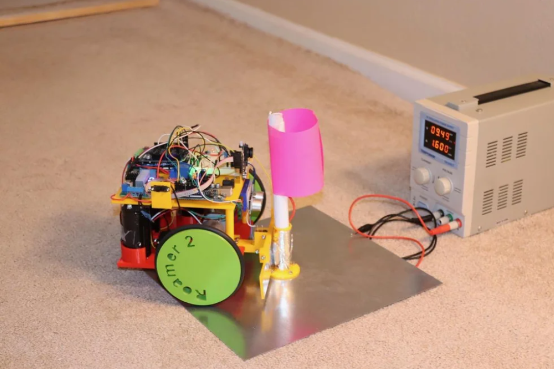
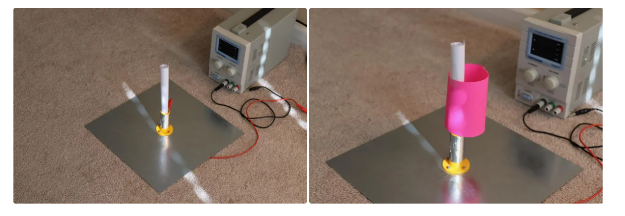
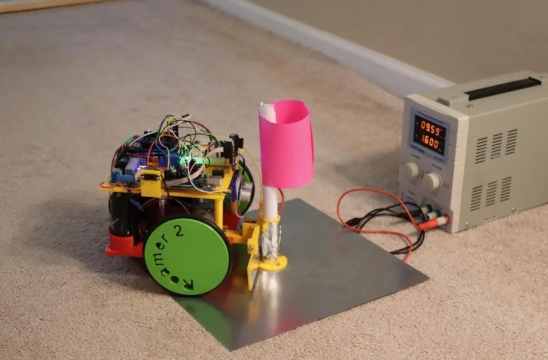
该机器人的最长运行时间约为 11 分钟,但她在 4 分钟后开始寻找充电器(使用 Pixy 相机和 Arduino)。充电时间约为两分钟。因为她是由超级电容器供电,所以她可以充电和放电数万次(最多任何速率)而不会降低电容器的性能。充电站是一块 12“ x 12” 的金属板,中间有一根杆子。Roamer 2 的前保险杠接触杆,弹簧(由伺服电机降低)接触金属板。设置为 12 伏(最大值)和 1.6 安培(最大值)的台式电源提供能量。
补给品
升压转换器
500 法拉,2.8 伏电容器
杠杆开关,瞬时
Arduino*2
电机护罩
真空带
三安培二极管
4.7k 电阻*4
面包板
铝制胶带
弹簧,5.5 毫米 x 38 毫米
钢板
台式电源
电线、焊料、3mm 螺丝
3d 打印部件(下文提供下载方式)
齿轮
伺服电机
小精灵相机
超声波模块
继电器模块
第 1 步:
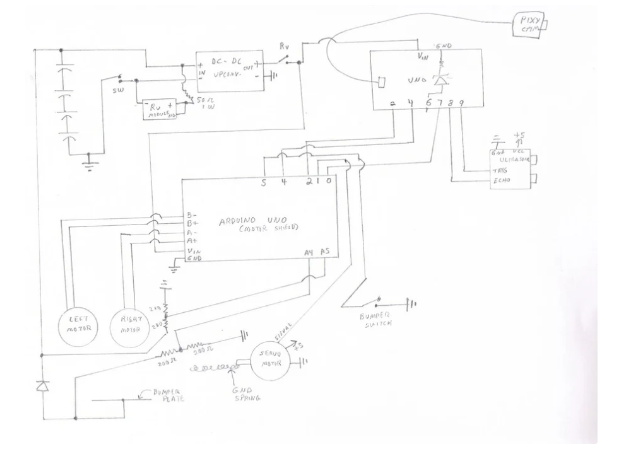
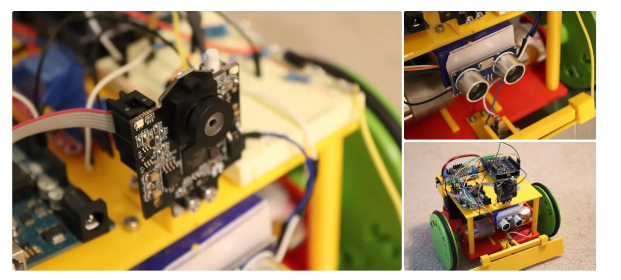
示意图如下所示。有两个 Arduino 处理器。一个管理 Pixy 相机和超声波换能器,将结果发送到电机控制 Arduino。
roamer2c_may.ino 点击下载
left_right_ultrasonic.ino 点击下载
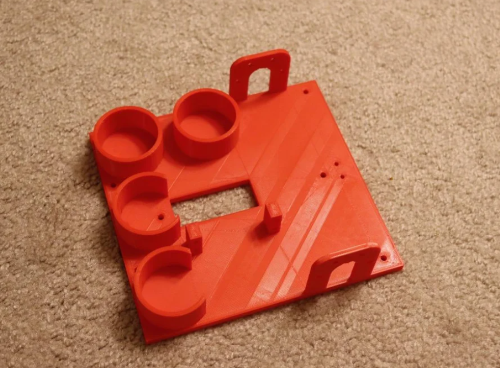
第 2 步:打印3D文件
basea.f3d
basea.stl
charge pole tall.f3d
spring hold 2022.f3d
switch bar.f3d
switch bar.stl
switch holder.stl
slide switch.f3d
motor support.stl
charge pole tall.stl
motor support.f3d
spring hold 2022.stl
wheel.f3d
wheel.stl
slide switch.stl
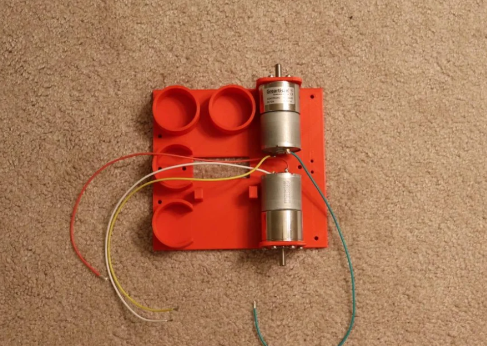
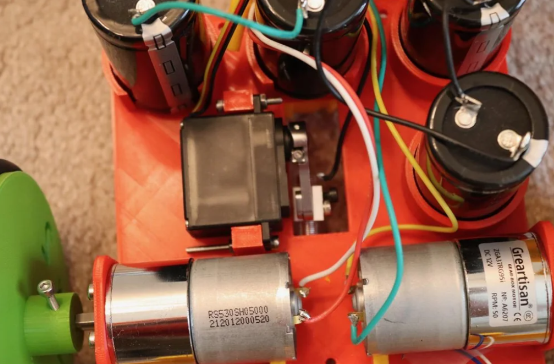
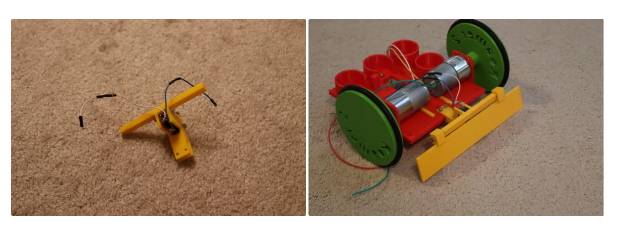
第 3 步:将电机安装在底座上
第4步:将弹簧动力拾取器连接到伺服电机

第 5 步:安装伺服电机和电容器
第 6 步:将轮胎(真空带)安装在车轮上

第 7 步:将开关连接到开关支架,保险杠和车轮添加到底座上
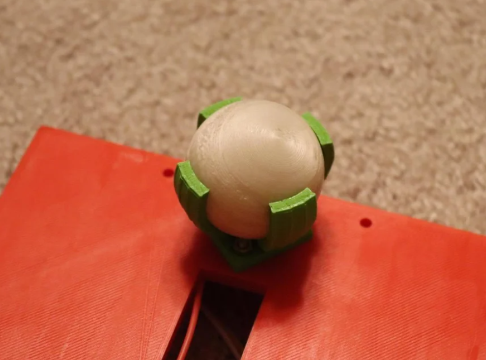
第 8 步:将脚轮添加到底座的后部
第 9 步:在前保险杠上添加铝箔胶带
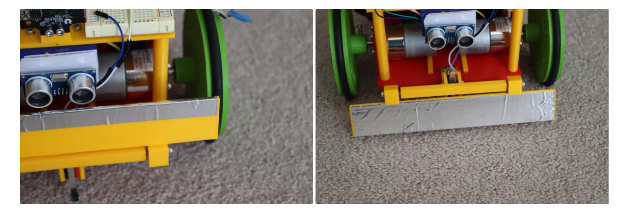
第 10 步:将相机和超声波换能器添加到主体
第 11 步:细节调整
第 12 步:最后设置
-
机器人
+关注
关注
211文章
28418浏览量
207101 -
升压转换器
+关注
关注
2文章
662浏览量
34902
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论