 同步通信和异步通信的区别
同步通信和异步通信的区别
单工单工,即数据传输只在一个方向上传输,只能你给我发送或者我给你发送,方向是固定的,不能实现双向通信,如:室外天线电视、调频广播等。
半双工半双工比单工先进一点,传输方向可以切换,允许数据在两个方向上传输,但是某个时刻,只允许数据在一个方向上传输,可以基本双向通信,如:对讲机,IIC通信。

全双工比半双工更先进的是全双工,允许数据同时在两个方向传输。发送和接收完全独立,在发送的同时可以接收信号,或者在接收的同时可以发送。它要求发送和接收设备都要有独立的发送和接收能力,如:电话通信,SPI通信,串口通信。
同步和异步的区别
串行通信可以分为两种类型,一种叫同步通信,另一种叫异步通信。
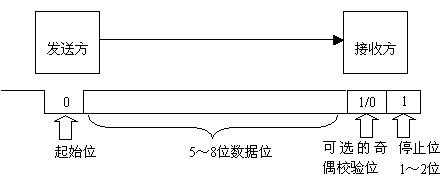
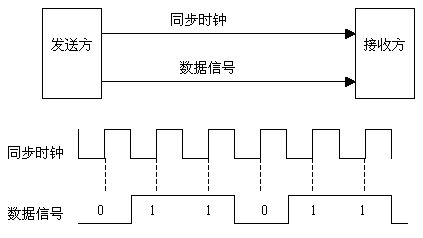
简单的说,就是同步通信需要时钟信号,而异步通信不需要时钟信号。
同步:发送方发出数据后,等接收方发回响应以后才发下一个数据包的通讯方式。
异步:发送方发出数据后,不等接收方发回响应,接着发送下个数据包的通讯方式。
SPI和IIC为同步通信,UART为异步通信,而USART为同步&异步通信。
USART:通用同步和异步收发器
UART:通用异步收发器
即USART支持同步和异步收发,而UART只支持异步收发。
如STM32的串口工作在同步模式时,即智能卡模式时,就需要连接同步时钟引脚。
原文标题:单工、半双工、全双工、异步和同步的区别
文章出处:【微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
异步通信
+关注
关注
1文章
57浏览量
10191 -
同步通信
+关注
关注
0文章
28浏览量
9197
原文标题:单工、半双工、全双工、异步和同步的区别
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
同步通信 VS 异步通信,你选对了吗?
在嵌入式系统中,通信是实现设备间数据交换的核心。外设和计算机之间通过数据信号线、地线等按位进行传输数据的通信方式就是串行通信。同步通信和

异步通信和同步通信
(同步通信)通信。本节只对rostopic做一些简单的讲解,详细的了解可以前往ros的wiki上的rostopic。如果您还想了解servicr,可以前往ros的wiki上的rosservice。我们先来了解一下
发表于 09-01 06:57
异步通信方式与同步通信方式的特点
1.异步通信方式的特点:异步通信是按字符传输的。每传输一个字符就用起始位来进来收、发双方的同步。不会因收发双方的时钟频率的小的偏差导致错误。
发表于 09-06 09:01
同步和异步同步通信的相关资料分享
同步和异步同步通信(Synchronous) ,通过在发送端和接收端之间使用共同的时钟从而使得它们保持“协调” 。虽多占了一根10线作为时钟线,但数据传输速度快,适于需要高速
发表于 12-24 06:48

浅谈PLC的异步通信和同步通信
所谓异步是指发送方和接收方之间的数据帧不需要严格的同步或同步。同步是指发送方和接收方数据帧之间的严格同步,而不仅仅是比特之间的严格
发表于 01-18 11:12
•2554次阅读
异步电路和同步电路区别在哪?
异步电路和同步电路区别在哪? 异步电路和同步电路是两种不同的电路设计方法,它们在功能、工作原理和应用领域上有着显著的差异。下面将详细介绍





 工商网监
工商网监
评论