 关于激光雷达的六个常见误区
关于激光雷达的六个常见误区
随着世界科技向智能化、高效率发展,激光雷达及其应用也受到越来越多的关注。但是,人们对激光雷达技术及性能等方面也存在一些误解。本文将为大家揭开关于激光雷达的六个常见误区。
1、激光雷达应用的技术复杂
虽然激光雷达是由不同硬件组成的复杂传感器,但实际上其基本工作原理相当简单。传感器使用飞行时间法,该探测原理类似于蝙蝠使用声波或雷达使用微波。
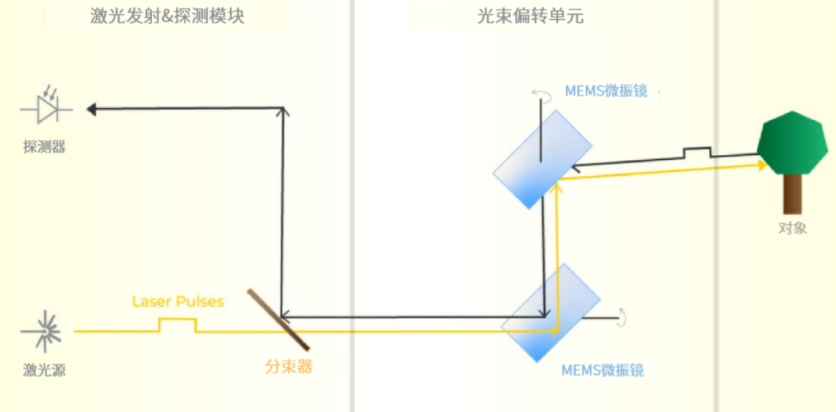
如果我们把传感器分解成几个部分,即激光器、探测器和光束偏转单元,激光雷达就不再是一项令人望而生畏的技术了。激光源首先发出激光脉冲,这些脉冲通过微振镜偏转到场景中,探测器检测反射光,根据激光脉冲发射时间和返回时间精确计算出距离。 每秒钟重复数千次甚至数百万次以上这个过程,实时生成精确的3D环境点云。这些3D点云数据易于分析和利用,例如,用于自动驾驶决策。 这项技术是在20世纪60年代早期发明脉冲激光器之后发展起来的,脉冲激光器重复发射光脉冲,而不是采用连续波。
2、在自动驾驶汽车应用中,激光雷达是多余的
埃隆·马斯克(Elon Musk)在2019年的一次会议上忽视了激光雷达在自动驾驶汽车上的用途,这一事件迄今为止滋生了许多关于激光雷达的谬论。他声称,在相机和智能算法的辅助下,激光雷达是多余的,并将一直坚持自己的立场。 摄像机应用不同的图像识别技术,可以采集彩色视觉图像,但仅仅采用一个摄像机,只能捕捉到2D数据,很容易导致视觉错觉和距离误判。有不少的悲惨例子表明,这些缺陷是危险的,有时甚至是致命的。 相比之下,激光雷达可以可靠地捕捉3D数据,并精确识别出距离和物体尺寸。 融合精确的3D激光雷达数据有助于在摄像机“失明”的情况下依然能够感知周围环境,比如在走出隧道后摄像机需要一定时间适应光线变化等场景。 此外,摄像头生成的2D图像,表面上看起来可能足够精确,足以训练自动驾驶汽车的算法。但它们仍然有很多不精确的地方,会降低机器学习模型的准确性,从而降低车辆感知、预测和决策的能力。促进自动驾驶的机器学习能力需要具有可扩展性,并解决“长尾巴”问题。这意味着仅满足道路上车辆所面临的95%的场景是不够的,基于机器学习的自动驾驶功能还要针对5%的棘手情况进行训练,同时不断提高其性能,这需要大量纯相机系统数据用于训练。 相比之下,激光雷达可以提供更多的机器学习预测模型,同时生成更高精度的训练数据。因此,激光雷达是更可靠、更健壮的自动驾驶系统所必需的传感器。
3、激光雷达可以完全被其他传感器取代
关于激光雷达最常见的一个误解是,它可以被相机或雷达传感器替代,这种误解源于人们对这些传感器技术如何以不同方式对物体进行分类缺乏了解。在理解了这些传感器的不同能力和产生的数据类型之后,我们会了解到它们在功能上的互补。相机采集到的是2D图像,提供灰度或颜色信息、纹理和对比度。为了进一步分析这些数据,需要使用图像识别软件。因为相机应用的是被动测量原理,物体需要被照亮来检测。此外,需要两个或更多的相机来创建3D图像,以及高计算能力。 雷达测量三维信息,在确定物体距离和速度方面具有极高的精度。然而,分辨率较低,他们无法精确探测(以厘米为尺度)或对物体进行分类。 激光雷达将采集得到的三维数据创建形成点云,根据点云形状和大小,可以精确地检测物体,将物体分为不同的类别,如人、汽车、建筑物等。 激光雷达可以收集非常详细可靠的三维信息,从而填补了其他传感器技术的不足。在各种环境下可以检测和准确分类目标,因此在各类传感器中脱颖而出。来自相机的数据可以用于更深入的分析,雷达收集的距离和速度数据可以用激光雷达进行验证,以获得更高的精度。这意味着,未来所有基于传感器的应用都将集成摄像头、雷达系统、激光雷达以及其他传感器。
4、激光雷达不能在恶劣的环境条件下工作
摄像机不能在没有足够的环境照明的情况下工作,例如在汽车的应用中,摄像机的探测距离只能达到前照灯的照射距离。相比之下,无论光强度条件如何,激光雷达的探测范围都可以达到数百米,因为它依赖的是红外激光束而不是可见光。也就是说,一辆配备了激光雷达传感器的自动驾驶汽车,即使关掉前照灯,在漆黑的环境下驾驶也能像在白天一样顺畅。 当谈到像雾、雨或雪这样的恶劣条件时,激光雷达在性能上再次展现出明显的优势,可以在感知系统中弥补其他传感器(如相机)的不足。 在雨中,激光雷达通常比相机表现得更好,因为它们的光束很大。这使得光束能够绕过传感器反射镜上的障碍物(如雨滴),因此激光雷达的射程在一定程度上不受影响。相比之下,相机的像素尺寸要比雨滴的尺寸小得多,因此它的视野会被遮挡。 大光束还使激光雷达能够检测来自不同范围的多个回波,并只处理信号最强的那个。这在恶劣的天气条件下也会很有用,比如下雪时,激光雷达可以忽略雪花的反射所带来的影响。没有加入任何机器学习算法的相机,不能区分雪花,湿镜头或硬物体,最终返回一个扭曲的图像。 激光雷达的曝光时间和快门速度(百万分之一秒)也比相机(千分之一秒)要短,这意味着雨滴不会被检测为跨越多个像素的条纹,而是原始形状。
由于激光雷达是一种光学设备,其性能在大雾等条件下也会受到负面影响,但它仍能够提供更多比相机等传感器的有价值的数据,并且检测的距离更远,如上图所示。
5、激光雷达传感器很昂贵
曾经有一段时间,市场上唯一可用的激光雷达是旋转式激光雷达,这种激光雷达非常昂贵,体积很大,无法大量生产。因此,人们对激光雷达及其高昂的价格仍有误解是很自然的。但自从MEMS(微机电系统)激光雷达问世后,彻底改变了这一说法。MEMS组件是由硅制成的,很容易进行生产扩展,因此具有非常高的成本效益。 固态激光雷达采用标准组件,无需定期维护,因此成本降低。近年来,这些激光雷达传感器的成本已经从几千美元降到几百美元,这种趋势会在未来持续下去。事实上,中程传感器在大批量生产时甚至可以以三位数的价格出售。
6、基于MEMS的激光雷达性能不高
尽管基于MEMS的激光雷达传感器具有可量产、成本低等优点,但人们经常误以为这些设备的探测范围很小。这种说法源于MEMS微振镜通常非常小(因此在MEMS中称为“微型”)。一般来说,镜子尺寸越大,接收面积越大,探测范围越长。虹科开发了自己的MEMS微振镜,其尺寸超过10mm,能将高比例的光子定向返回到光电探测器上。
虹科固态激光雷达传感器借助同轴设计实现空间滤波,这意味着检测器可以精确接收来自发射方向的光子。最小化背景光,实现高信噪比,从而增大探测范围。
-
传感器
+关注
关注
2550文章
51035浏览量
753077 -
激光雷达
+关注
关注
968文章
3967浏览量
189825 -
自动驾驶汽车
+关注
关注
4文章
376浏览量
40829
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论