 被动红外传感器前端设计
被动红外传感器前端设计
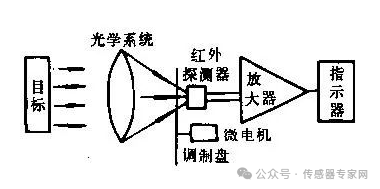
低成本热释电传感器可用于人员检测和热源远程监控。它们由一个陶瓷晶体组成,该晶体由一个 JFET 前置放大器进行局部缓冲,该前置放大器通过一个外部负载电阻器获取其漏极电流偏置。
与传感器的固有偏移电压(5 V 激励时超过 1,800 mV)相比,入射 IR 的输出电压变化非常小(峰峰值约为 3.6 mV,对于用于制作系统原型的 Murata 传感器)。失调电压对温度高度敏感。因此,接口电路必须区分此偏移电压的变化和对应于运动的实际传感器输出。接口电路有其工作要做,因为对应于运动的信号通常小于偏移电压的 0.2%。
PIR 传感器的数据表通常会针对不同的操作模式显示各种不同的应用电路。这些电路需要大量庞大的外部无源和有源元件来滤除低频偏移电压。这些电路对来自传感器元件的缓冲输出的交流信号提供宽带通响应。直流和极低频信号被响应的高通部分抑制,截止频率通常低于 0.01 Hz,从而以分钟为单位测量建立和恢复时间!在高端,约 50 Hz 以上的频率被抑制,通常具有两极响应(但不足以应对大量交流线路频率调制)。应用于通过的信号的中频带增益是 10,000 到 40,000 之间的任何值!
图 1 中的 PSoC 系统使用混合(模拟加数字)伺服环路来消除 DC 偏移,从而形成一种低成本的单芯片解决方案,其占用的面积和体积要小得多,并且可以集成在一个小型传感器单元中。 这种集成的传感器加 SoC 封装与独立传感器的尺寸相同,可以提供高模拟输出电平、数字输出(包括 LED 驱动器)以及 UART、I2C、SPI 等主机连接选项。在数字域中执行,使用固件或可编程硬件,SoC 解决方案非常灵活。集成的 SoC 可以在现场重新配置以满足应用的要求。此外,伺服回路的参数可以在运行时使用主机控制器重新调整,以适应环境的变化。
图 1:用于 PIR 接口电路的 Cypress Semiconductor PSoC 4200 解决方案。
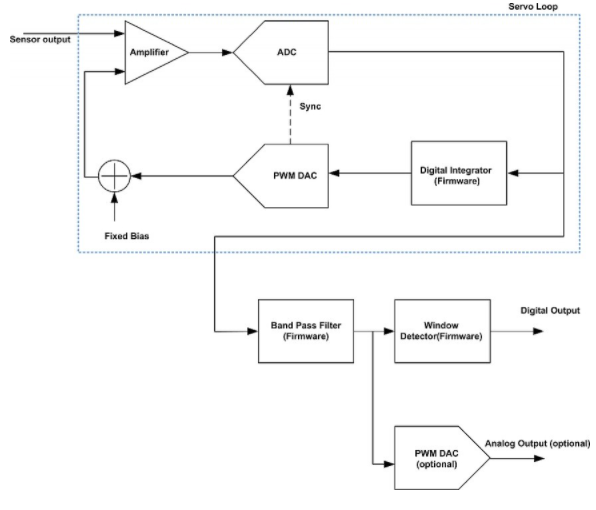
图 2 显示了使用 PSoC 的可编程模拟和数字模块实现伺服环路。ADC 的转换开始信号是使用分频器从 PWM 输出生成的。这种安排使 ADC 转换与 PWM 伺服反馈同步,并减少了 ADC 输出中的这种噪声分量。PWM 以 5.8 kHz 运行。ADC 采样率约为每秒 293 个样本。在伺服环路电路中,Rpwm_1、Rpwm_2 和 Cpwm 构成一个用于 PWM 输出的 T 滤波器。Rg1 和 Rg2 提供接近 PIR 传感器偏移电压的直流偏置。PWM 滤波器电路组合可用作具有成本效益的高分辨率 12 位 DAC。
图 2:使用 SoC 的可编程模块实现。
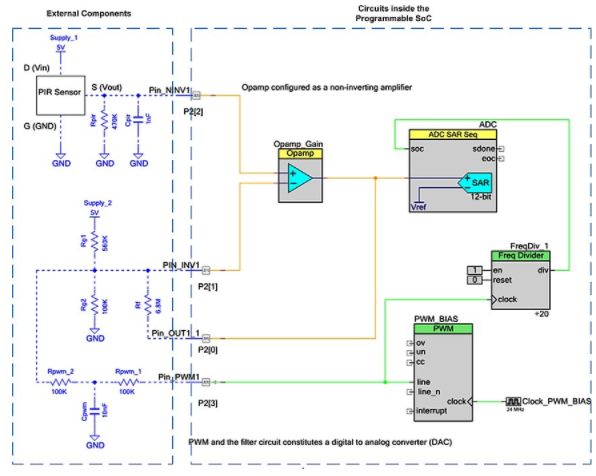
从运算放大器的反相输入到地的等效电阻接近 60 kΩ。因此,同相放大器的增益约为 113。
中高频噪声由连接在反馈电阻上的中等大小的电容器控制,以提供数百赫兹的带宽。只需要这个单一增益级,因为系统灵敏度的其余部分将来自随后的 ADC 级。使用单个放大器可节省功率、降低成本并改善过载行为。
放大器的非反相输入有一个接地电容和一个电阻连接到 I/O 引脚,该引脚由 12 位 PWM DAC 驱动,其输入字来自数字积分器,可以在固件或可编程数字硬件。
运算放大器输出驱动 SAR 的反相输入,其非反相输入接地。这种连接反转转换器输出的意义。SAR 以大约 293 sps 的速度转换。ADC 的孔径时间可以保留为默认设置,因为反馈环路中的电容器将闭环增益滚动到远低于 ADC 等效孔径频率的单位。
ADC 输出格式设置为有符号,因此 1.024 V 的输入电压(参考电压值)将导致 ADC 处的代码全为零。ADC 驱动积分器,当环路闭合时,积分器输出将四处移动以保持 ADC 代码的平均值为零。换句话说,这个过程既充当高通滤波器,又充当工作点稳定器。它取代了阻止传感器直流偏置的大电容值。因为它是在代码中实现的,它可以很容易地被暂停、重置或加速,这意味着系统可以在上电后很快稳定下来。与依赖大 RC 时间常数的无源电路相比,这是一个显着优势。
除了馈入积分器外,ADC 的输出数据还应用于 0.005 Hz 至 0.01 Hz 的一阶 IIR 高通滤波器,从而消除了任何未被伺服环路完全抑制的 DC 和低频信息。之后,一个合适的低通滤波器会阻止任何被认为不合需要的更高频率,并将此阶段的分辨率扩展到远低于此处使用的 ADC 设置的正常 12 位分辨率下限。在涉及的采样率下,这些滤波器可以在 CPU 中实现。整体响应看起来像一个带通滤波器,在这种数字实现中显然更加可配置。
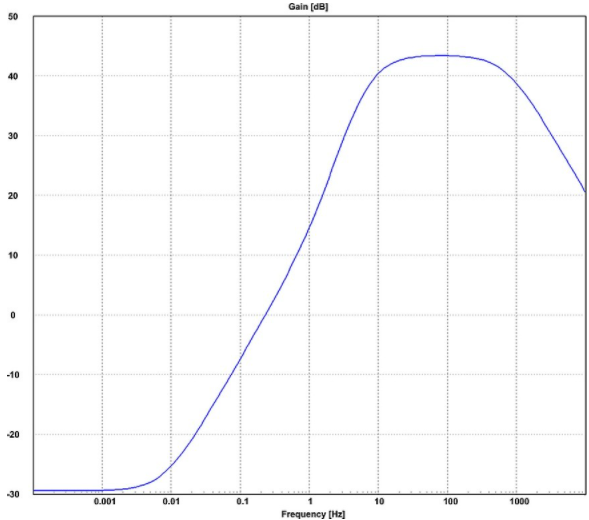
放大器、ADC、数字积分器和 PWM DAC 构成一个闭合伺服环路,可消除传感器输出的直流偏移。当传感器偏移发生变化时,积分器累积误差信号并通过 PWM DAC 改变放大器偏置,从而使运算放大器输出(和 ADC 计数)保持为零。因此,偏移量的任何变化都无效。然而,与运动相对应的传感器输出的变化不会被抵消,因为伺服回路的速度不足以响应传感器输出的突然变化。伺服环路的典型频率响应如图 3 所示。
图 3:伺服回路的频率响应
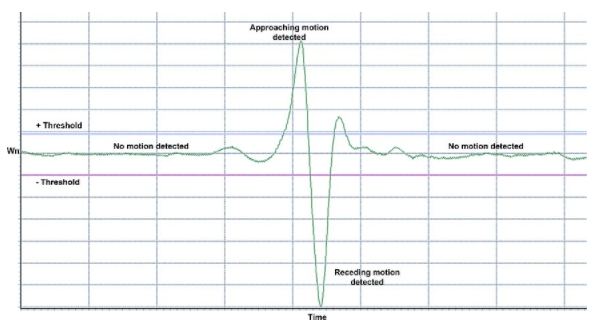
过滤后的 ADC 值可以以多种方式使用。可以将其与阈值进行比较,并在超过阈值时发出警报。它可以应用于定时电路,只有当电平超过预设时间时才会触发警报,然后警报可以延长,即使刺激消失也能持续预设的持续时间。可以为信号的上升和下降值设置单独的阈值。这允许 PIR 传感器区分接近和后退的热源。
如果需要,数字输出也可以转换回高幅度模拟信号。过滤后的 ADC 计数数据经过适当缩放并应用于另一个 PWM 模块的输入。PWM 信号被施加到一个引脚,其输出由 RC 滤波器进行低通滤波,并使用所选 SoC 器件中的其他可用运算放大器进行缓冲。该输出可以作为照射传感器的输入红外变化的副本传递到外部电路。
该项目的固件流程如图4所示。固件滤波器和积分器需要实时运行,伺服回路才能工作。因此,固件集成器和滤波器包含在 ADC 中断服务程序中。非关键函数位于 main.c 的外循环中。
图 4:固件流程图。
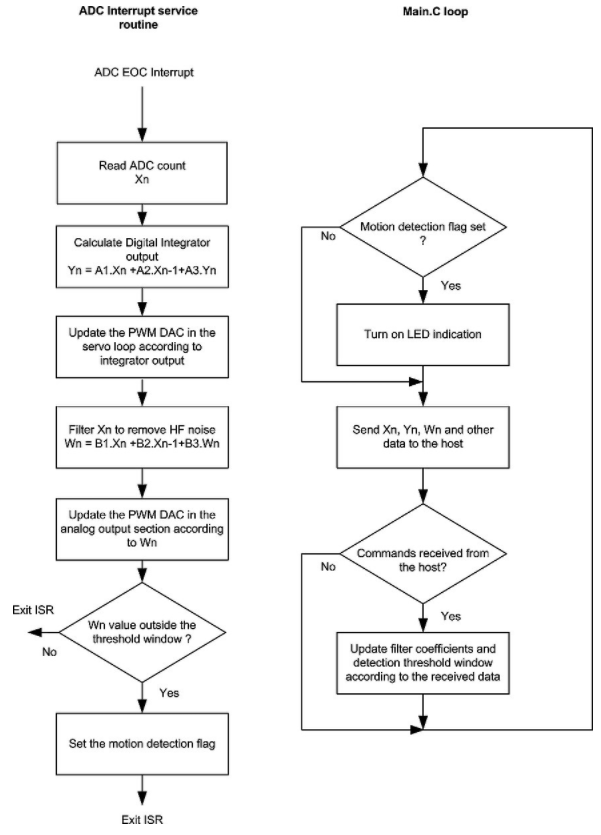
除了运行伺服循环和输出例程外,固件还可以使用现代可编程 SoC 中提供的各种通信模块(例如 UART、I2C、SPI 等)将数据发送到主机控制器以进行实时监控。主机还可以在运行时通过将命令发送回 SoC 来重新调整循环参数。
图 5 显示了系统的典型输出。Wn 的大变化表明检测到运动。滤波器系数和阈值窗口可以在运行时进行调整。这不仅对在开发过程中表征和优化设计很有用,而且在操作过程中对其进行调整也很有用。具有集成无线连接(如蓝牙)的 SoC 正在上市,为工业和环境传感带来了一种新的无线方法。
图 5:系统的典型输出。
这个简单的应用程序展示了现代可编程 SoC 的高度集成特性与设计工具的灵活性相结合,如何为已建立的电路和系统设计问题带来全新的现代解决方案。
作者:Nidhin Mulangattil Sudhakaran,Kendall Castor-Perry
审核编辑:郭婷
-
控制器
+关注
关注
113文章
16562浏览量
180303 -
滤波器
+关注
关注
161文章
7919浏览量
179506 -
soc
+关注
关注
38文章
4237浏览量
219781
发布评论请先 登录
相关推荐
红外传感器原理与应用
红外传感器的工作原理及应用
物联网系统中常见的非接触人体感应方案_红外传感器详解

红外传感器和超声波传感器有什么区别
人体红外传感器输出信号有哪些
人体红外传感器的数据属于什么量
人体红外传感器的数据类型及工作原理
人体红外传感器的作用是什么
人体红外传感器能穿透玻璃吗为什么
红外传感器技术深度解析:原理、分类、应用与选型策略
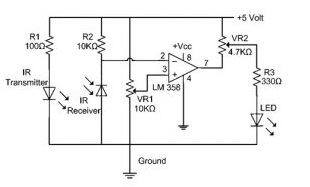
红外传感器电路图 红外传感器的工作原理和应用





 工商网监
工商网监
评论