 基于无人机激光雷达的刺槐人工林森林健康指标的构建
基于无人机激光雷达的刺槐人工林森林健康指标的构建

1研究区概况
黄河三角洲位于渤海湾南岸和莱州湾西岸,主要分布在中国山东省东营市和滨州市境内,属暖温带半湿润大陆性季风气候,年平均气温11.7~12.6℃,日照充足,雨热同期。该地区土壤以滨海盐土和滨海潮土为主,养分含量低,且盐渍化严重,不利于乔木生长。自20世纪80年代以来,刺槐作为主要的造林树种在该地区广泛种植,逐渐形成以孤岛、军马场、黄河故道和大汶流自然保护区4个林场为主体的种植区。本研究以孤岛林场为研究区(图1)。
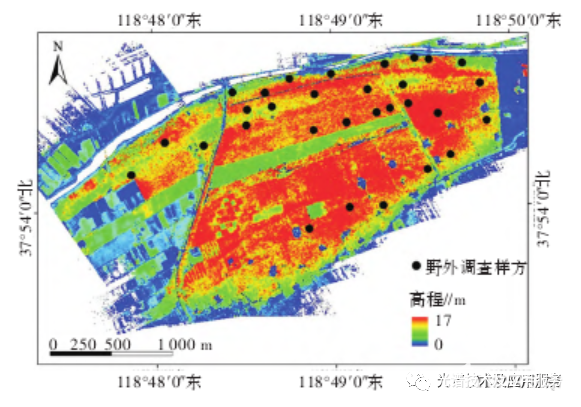
图1研究区及样方分布(以LiDAR数据为背景)
2材料与方法
2.1数据,
2.1.1野外生态调查数据
本研究于2017年6月、2019年6月和2019年10月共获取了30个野外调查样方。根据两级采样设计原则,在30m×30m的样方的4个角和中心布置了5个10m×10m的次样方。利用GPS记录每个样方的位置。根据美国林业局树冠状况分类指南对样方进行健康分级,具体方法如下:在5个次样方中选择1个标准木材评估5个树冠活力指标,分别为活冠比、冠幅、郁闭度、林冠枯梢率、树叶透光度(表1),取5个次样方指标的平均值作为样方的指标值,最后根据森林健康等级判断规则(表2)得到样方的健康等级。30个样方被分为3类,包括14个健康样方、10个亚健康样方和6个不健康样方。
2.1.2无人机LiDAR数据
本研究于2017年6月采集了黄河三角洲孤岛林场区域的无人机LiDAR数据。无人机上搭载激光扫描仪、IMU(Inertialmeasurementunit)和GPS(Globalposi⁃tionsystem),飞行高度为120m,飞行速度为4.8m/s,巡航半径为2km。激光波长采用近红外波段,光斑直径约为50mm,获取的平均点密度为40个/m2,采用WGS84坐标系和UTM投影。
2.2LiDAR数据预处理
首先采用基于统计的点云去噪方法(Statisticaloutlierremoval)对原始的无人机LiDAR数据进行去噪。然后通过改进的渐进三角网加密算法(IPTD)对去噪后的LiDAR点云进行滤波,将点云分为地面点和非地面点。利用地面点插值生成数字地形模型DTM,并用DTM对点云数据进行归一化消除地形的影响。再利用归一化后的点云生成数字表面模型DSM,减去DTM得到冠层高度模型CHM。本研究为了获取详细的冠层变化,将CHM的空间分辨率设置为1m2。
2.3LiDAR特征变量提取
2.3.1垂直方向的变量
本研究的垂直变量分为2个部分,包括基于归一化LiDAR点云中提取的特征变量和基于冠层垂直剖面提取的特征变量。基于点云提取的变量包括3个。高度百分位数(H99)是所有回波点按高度排序后,99%的点云所在的高度,可以从整体上反映样方内树木的高度。垂直复杂度(VCI)可以量化点云的垂直分布,其数值区间为0~1,0表示点云在垂直方向上分布不均匀,1表示分布均匀,公式为:
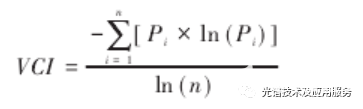
式中,n为垂直方向上划分的高度层数,Pi为每个高程层中点云占点云总数的比例(%)。叶面积密度的变异系数(LADcv)可以反映冠层内叶面积指数随高度变化的变异情况,公式为:
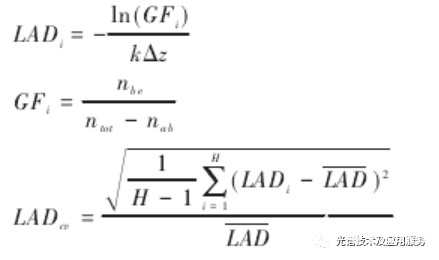
式中,H为垂直方向划分的高度层数,GF为间隙率,k为消光系数,nab为第i个高度层以上的点云数量,nbe为第i个高度层以下的点云数量,ntot为点云总数。冠层垂直剖面可以反映包括枝叶在内的整个树冠在垂直方向上的点云密度分布情况,由某一高度层的点云与点云总数的比值表示。本研究采用Weibull密度函数拟合冠层垂直剖面,以获取尺度参数α(weibull_α)和形状参数β(weibull_β),公式为:

式中,f(x)是点云密度,x是高度百分位数。
2.3.2水平方向的变量
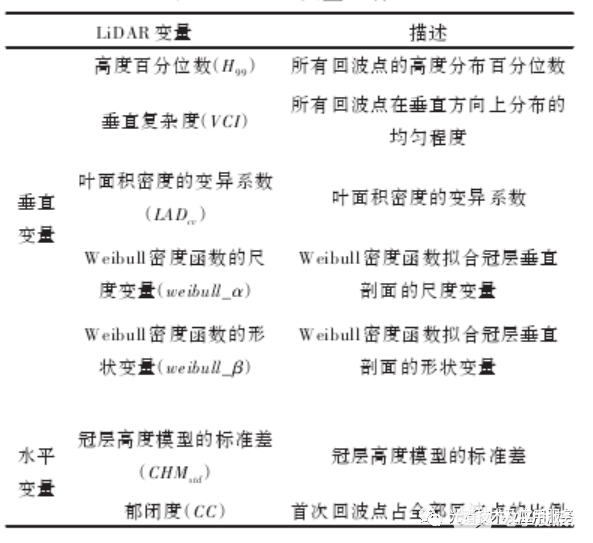
冠层高度模型CHM描述了树冠的表面形态。树木枯梢会增加激光脉冲的穿透率,并在CHM的水平方向产生不同大小的不规则斑块,因此可以通过CHM的标准差(CHMstd)反映冠层的稀疏程度以及落叶情况。郁闭度(CC)是反映林分质量的重要参数,是冠层垂直投影与林地面积之比。使用LiDAR估测郁闭度时,常用首次回波点与所有回波点的比值表示。提取的变量及其具体描述见表3。
表3LiDAR变量及描述
2.4森林健康指标构建
本研究采用Person’s相关系数度量LiDAR变量之间的关系,从而确定能够全面且系统地反映森林健康状况的关键LiDAR变量。先通过层次聚类的类平均法对LiDAR变量进行聚类,把相关性相似的变量归为一类;再根据类别内相关系数最大(能代表所在类的所有指标)、类别间相关系数最小(与其他类的指标相关性最低)的原则,在每一类中只选取一个变量作为关键变量构成森林健康指标。为了探究森林健康指标在解释森林健康状况时的机理,采用无监督的层次聚类法将每个指标分为3类,分别对应刺槐健康等级中的健康、亚健康、不健康。最后根据每个指标的聚类结果,以类边界处的中值作为阈值,构建森林健康指标的分级阈值。与美国林业局树冠状况分类指南类似,本研究基于森林健康指标制定了森林健康等级的判断规则,即识别1个样方是否满足健康或不健康的规则,若不符合这2个等级则被视为亚健康。据此对研究区的刺槐林进行森林健康等级判断,采用总精度和Kappa系数对判断结果进行评价。
3结果与分析
3.1LiDAR变量分析
根据LiDAR变量的Person’s相关系数(图2)将其分为4类。LADcv和weibull_α分别单独作为一类(与其他变量相关性低),CHMstd和H99为一类(r=0.84),weibull_β、CC、VCI为一类,相关系数为0.64~0.94。随后根据选取原则,分别在后2个类别中选取H99和VCI。最终得到由LADcv、weibull_α、H99和VCI4个变量组成的森林健康指标。
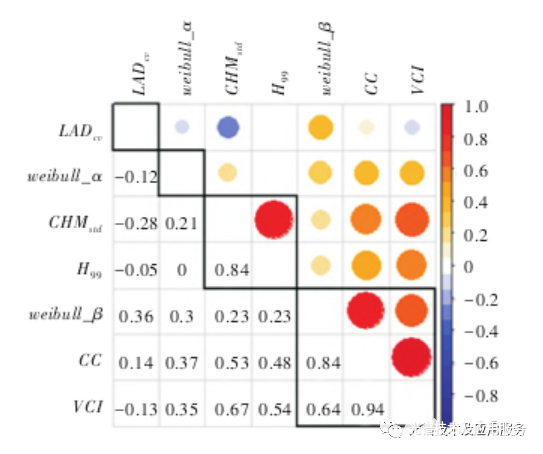
图2LiDAR变量的相关矩阵图
3.3刺槐人工林的健康判断与评价
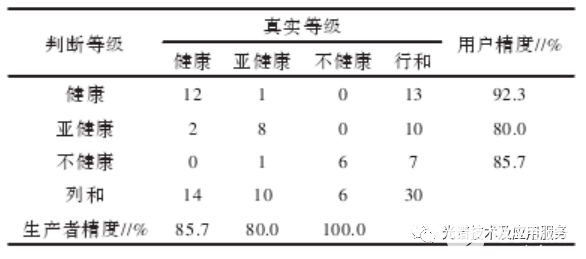
基于上述森林健康指标对研究区的30个样方进行健康等级判断,通过与野外调查结果比较,可知分类的总精度为86.7%,Kappa系数为0.79,对判断结果的评价如表6所示。由表6可知,健康等级之间的混淆主要出现在健康样方和亚健康样方之间,健康样方的生产者精度为85.7%,说明14.3%的健康样方被错分为亚健康样方,用户精度为92.3%,说明7.7%的亚健康样方被错分为健康样方;亚健康样方的生产者精度为80.0%,有20.0%的亚健康样方被错分为健康或不健康样方;用户精度为80.0%,说明有20.0%的健康样方被错分为亚健康样方;重度枯梢刺槐样方的生产者精度为100.0%,而用户精度为85.7%,说明不健康样方均被正确识别,但是有14.3%的亚健康样方被错分为不健康。因此森林健康指标识别健康和不健康样方有较大优势,但对亚健康样方的识别精度有待提高。
表6基于森林健康指标的刺槐森林健康等级精度评价
4讨论与结论
4.1讨论
黄河三角洲刺槐林的生长主要受长期土壤盐渍化的胁迫,整体生长状况不佳,不同退化程度导致刺槐林的树高、郁闭度情况存在差异。本研究利用LiDAR数据从树冠结构角度对其健康状况进行判别,获得了较理想的效果,主要是由于发生退化的刺槐多表现为落叶或树木低矮,很少表现为树冠枯黄变色。但是对于那些树叶变黄但还没有掉落的树木,仅从结构角度判断仍存在缺陷,此时利用光谱信息可以检测到这种变化。叶片变黄是因为叶绿素含量减少,会在525~565nm(绿色)、690~730nm(红边)和730~760nm(近红外)区域发生显著变化。森林健康是植被结构和叶片化学特征的函数,植被结构指树冠的变化,而叶片化学特征是指各种色素的含量。因此,在今后的研究中可以把能描述树冠三维结构的LiDAR技术与能反映树叶生化特征的高光学遥感技术结合起来,将有助于提高对森林健康等级的识别精度。
4.2结论
本研究以黄河三角洲孤岛林场的刺槐林为研究对象,利用无人机LiDAR数据提取表征植被垂直和水平变化的LiDAR特征变量,并通过聚类分析构建森林健康指标,得到以下结论:①森林健康指标包括LADcv、weibull_α、H99和VCI,分别从树叶茂密程度、树冠形状、树高、植被垂直分布4个方面对森林健康状况进行评价;②森林健康指标能有效识别出健康和不健康的刺槐林,对亚健康刺槐林的识别精度有待提高,总体上的分类精度较理想(总精度为86.7%,Kappa系数为0.79),说明激光雷达技术可以在判断森林健康状况方面发挥重要作用。今后的研究中可与高光谱信息结合起来,构建更为完善的森林健康指标。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑:符乾江
-
无人机
+关注
关注
237文章
11430浏览量
197081 -
激光雷达
+关注
关注
983文章
4590浏览量
197366
发布评论请先 登录
简析当下无人机激光雷达行业的技术瓶颈

固态激光雷达参数以及避障视频
纳雷科技推出无人机雷达高精度旋转平台
禾赛科技斩获新石器无人车核心激光雷达订单
无人机激光避障和360度避障哪个好?

无人机激光传感器辅助降落原理

一径科技激光雷达赋能硅行智能零笼系列巡检无人机
禾赛科技与美团无人机达成战略合作
禾赛科技固态激光雷达获美团无人机量产定点 计划2026年交付
多线激光雷达 3D SLAM 无人叉车系统解决方案:开启工业物流新变革

光伏电站无人机巡检系统价值分析
中科亿海微SoM模组——激光雷达控制板

北醒发布新一代水下单点激光雷达TF-UW500
什么是光伏区无人机智能巡检系统?




评论