 CAN总线系统架构在车联网领域中的应用
CAN总线系统架构在车联网领域中的应用

在汽车行业引入新技术是一项风险和成本密集型工作。特别是在车联网领域,这通常意味着在经过验证的机制、功能的增长和由于更先进的总线系统而增加的带宽之间取得平衡。过去几年实现的可靠性始终是标准,在任何情况下都不得冒险。最近对网络测试的需求大幅增加,这代表了新一代汽车硬件和软件组件批准过程中的重要一步。
迄今为止,CAN 总线已被证明是一种高效且稳健的通信媒介。凭借灵活的数据 (FD) 速率理念以及由此增加的带宽,CAN 总线系统架构的存在理由得到了显着扩展。日志中的变化、更高的数据长度和各种比特率需要新的或经过调整的测试用例和测试系统。
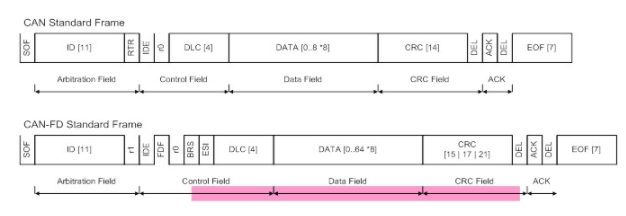
【图1 | CAN帧布局]
网络测试
测试总线参与者的网络功能的方法在各个原始设备制造商的规范和测试标准中定义。
除了总线物理特性之外,还要测试各种控制器参数,例如比特率和扫描时间。通过评估总线通信,对照数据定义(例如 ID《 DLC、循环时间、计数器的信号测试和校验和)测试控制单元的传输消息。
典型的测试用例包括确定工作电压限制、功耗和发射启动,以及以脉冲和斜坡形式对工作电压故障的反应。
测试 CAN 错误管理是 CAN 控制单元测试中的一项重要测试任务。为了检查总线关闭处理,控制单元的传输消息被中断,并且在等待阶段评估发送和等待阶段、重新初始化和接收准备情况。网络管理的测试用例符合所使用的网络管理类型(OSEK-NM、NMHigh、AutoSAR)并检查状态转换和唤醒原因,例如维护空闲总线和定时。车载诊断的测试复合体包含例如传输日志测试、CAN 错误管理(监控开始、电压阈值、消息故障、信号错误、总线关闭)和诊断服务检查。
CAN FD接口测试
CAN FD本质上是对日志级别的扩展。这就是为什么经典 CAN 的测试规范中的大多数点也适用于 CAN FD。下面简要说明几个需要额外执行的特性或测试用例。
兼容性
CAN FD 与 CAN 完全兼容,即每个 CAN FD 控制器都可以发送和接收经典 CAN 帧。但是,仅支持 CAN 标准的控制器无法解码 CAN FD 帧。
在 CAN FD 验收测试中,无论通过控制单元发送或接收的帧类型如何,都必须始终正确确认 (ACK)。由于错误识别的不规则性而导致的错误帧不得出现在总线上。
数据长度
最大应用程序数据长度从 8 个字节增加到 64 个字节。必须为所有发送的消息检查这些值。这以与经典 CAN 相同的方式发生,在不同条件下进行跟踪记录和分析,并根据数据定义中的规范进行后续测试。不正确的数据长度会导致接收者的功能受限,因此必须在相应的测试用例中进行模拟以识别故障。
比特率
CAN 总线上无故障通信的重要参数是比特率。与经典 CAN 不同,CAN FD 以灵活的比特率工作,即在一帧内具有不同的传输速度。在仲裁阶段,数据以高达 1 Mbit/s 的速度发送。在数据阶段,它 以高达 10 Mbit/s 的速度发送。例如,典型的组合是 500 和 2000 kbit/s。基于硬件的解决方案适用于传输端测试。这使得可以在一帧或多帧中同时并连续地测量两种比特率。高分辨率、CAN FD 触发示波器也适用于帧的说明性测量。
比特率开关 (BRS)
帧控制字段中的新 BRS 位表示以高比特率(隐性比特)或低比特率(显性比特)发送。通过跟踪记录和分析,将控制单元发送的帧与制造商规范或数据定义进行比较和评估。通常,必须始终以高比特率发送所有 FD 帧。
在接收端,控制单元不能区分快帧和慢帧。为此,单个或所有 FD 接收消息在特定时间段内既快又慢地发送。这既不能导致总线上的错误帧,也不能出现额外的错误存储器条目。
错误状态指示器 (ESI)
CAN FD 中的 ESI 位显示 CAN FD 控制器的当前错误状况。显性值指示错误主动,隐性值错误被动。
因此,在有关 CAN FD 错误管理的测试用例中,除了对达到 busoff 的反应的常见测试用例外,还必须强制执行和评估另外两个错误条件。为此,需要一个灵活、可配置的压力和触发模块,它可以中断任何 CAN 和 CAN FD 消息。
比特率切换
从慢比特率切换到快比特率发生在 BRS 位的采样点,从快比特率切换到慢比特率在 CRC 定界符的采样点或直接在识别错误后进行。因此,错误帧总是以标称(慢)比特率发送。码率切换必须测试发送端和接收端的故障识别。
扫描时间
CAN FD 控制器在明确定义的时间点确定每个发送或接收位的值。此值必须根据制造商规范进行配置。由于比特率切换,CAN FD 有两种不同的扫描时间。
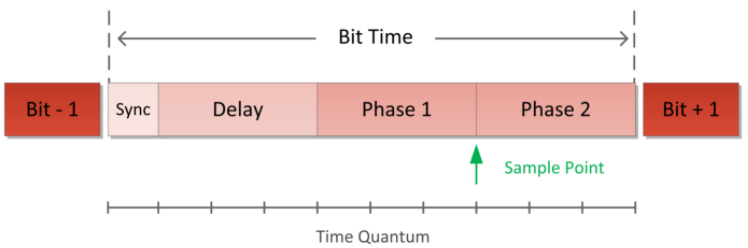
【图2 | CAN位时序]
可以借助各种方法确定扫描时间,包括根据专利 DE102009039200 A1 的方法。
对于 CAN FD,需要显着提高帧生成精度并调整信号生成以测量所有可能帧类型的扫描时间(CAN/CAN FD、标准/扩展、ISO/非 ISO) 。
硬件
要执行的控制单元测试的类型和范围决定了所需的硬件资源。
为了能够确定与控制单元的通信的安全性和容错性,必须将各个通信参数移动到允许的公差范围的限制范围内并超出该范围。
休息总线控制器
CAN 或 CAN FD 的通信矩阵可以选择定义为 DBC、FIBEX 或 AUTOSAR 系统描述格式。GÖPEL 61 系列电子平台的 restbus 控制器具有模块化且因此可扩展的测试资源概念。这使得对各个测试对象的灵活调整成为可能。
对于 CAN FD 通信,TJA1044GT 收发器与集成的 BOSCH CAN FD IP 内核结合使用,并允许高达 10 Mbit/s 的比特率。针对 CAN FD 相应扩展了 restbus 模拟(基于帧或根据 AUTOSAR)、传输和诊断日志或网络管理的功能。
压力、触发和分析模块
使用压力、触发和分析模块 Basic CON 4055,可以专门操作和分析 CAN/CAN FD 通信。这为进行精确的日志测试创造了机会。Basic CON 4055 可以中断任何 CAN/CAN FD 消息,并在四个可配置端口上为此提供 250 多个独立的消息触发器,以及用于外部资源使用的触发器输入和输出。
分析功能还包括 CAN/CAN FD 通信的比特率测量。对于 CAN FD,可以选择同时测量两种比特率(仲裁和数据阶段)。
该模块用于当前的接口和网络测试仪。
信号发生器
扫描时间的确定涉及根据 DE102009039200 A1 的过程中数据链路层中的错误处理。此处使用的发送器必须能够生成修改后的 CAN/CAN FD 消息。消息的处理通过数据区域中单个位的部分反转来进行。
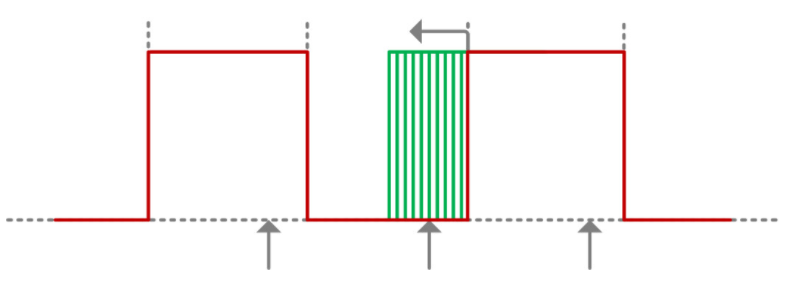
【图4 | 扫描时间确定原理图解】
然后 CAN/CAN FD 参与者通过错误电报对识别的 CRC 错误做出反应。
为了精确地进行百分之一的测定,使用了信号发生器,它可以以相应的分辨率、精度和速度发送测试信号。
概括
对于CAN FD,大部分汽车厂商的测试规范仍然有效,不受限制。在某些测试用例中需要升级,而另一些则是全新添加的。现有的测试系统将在硬件和软件领域进行调整和升级。在硬件上,这主要影响 restbus 控制器和压力和触发模块,而在软件上,则影响 CAN FD 日志的完整集成。
作者:Steffen Rauh,Andreas Schmidt
审核编辑:郭婷
-
控制器
+关注
关注
114文章
17907浏览量
195707 -
触发器
+关注
关注
14文章
2065浏览量
63612 -
信号发生器
+关注
关注
28文章
1738浏览量
113730
发布评论请先 登录
利用泰克示波器 CAN 总线解码器加快 CAN 总线的故障排除速度


CAN芯片静电防护方案

圆满收官 | 虹科CAN总线专题全系列直播精华回顾已上线!

CAN总线远程调试工具介绍
CAN总线断路、短路及反接故障的现象解析及影响评估

CAN网关的协议栈架构分析及性能优化策略


2025全球CAN总线网关转换模组选型推荐与解决方案解析
三格电子CAN总线通信原理及在消防领域中的应用

CAN总线入门双捷径:零基础到实战的极速指南
双轨速成:掌握CAN总线应用的实战秘籍
120Ω的秘密:CAN总线终端电阻的重要性



评论