 MPU6050简介及rt-thread软件包使用
MPU6050简介及rt-thread软件包使用

小伙伴们大家好,好久不更新RT-Thread实战笔记啦,今天来搞一搞MPU6050,话不多说,淦!
本章源码获取
欢迎在“小飞哥嵌入式”公众号后台回复“MPU6050”即可获取本教程源码
MPU6050简介
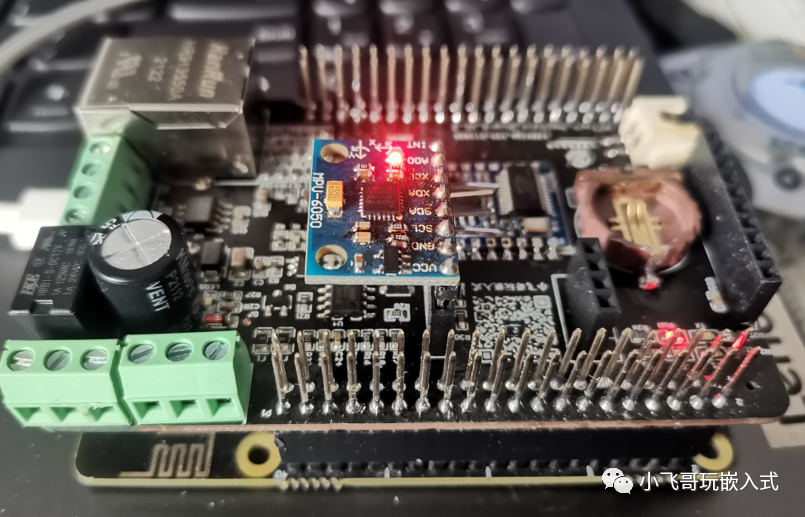
某宝买的,吃灰许久了...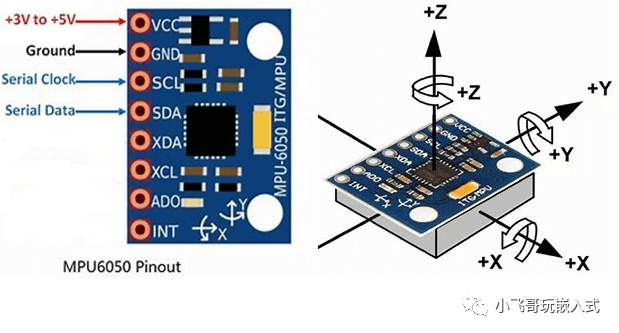
有钱,不想受那鸟气的,看这个,自己画一个,对比价格,我劝你买个吧,知道自己行就行了...
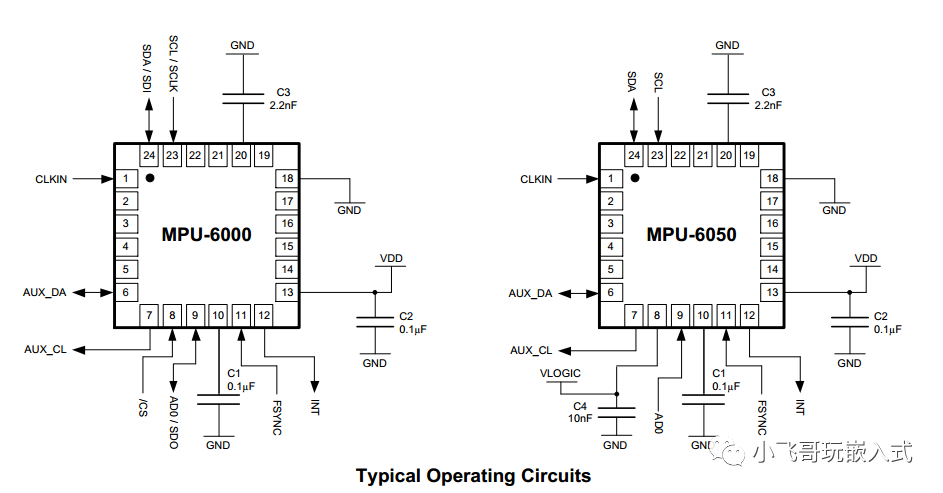
典型用法:
可在官网下载最新的芯片手册和寄存器映射和描述,参看:MPU6050 官网

基本功能:
MPU-60X0是世界上第一款集成 6 轴MotionTracking设备。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其 I2C或SPI接口输出一个9轴的信号( SPI接口仅在MPU-6000可用)。MPU-60X0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。
MPU-60X0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250, ±500, ±1000, ±2000°/秒( dps),加速度计可测范围为±2, ±4,±8, ±16g。
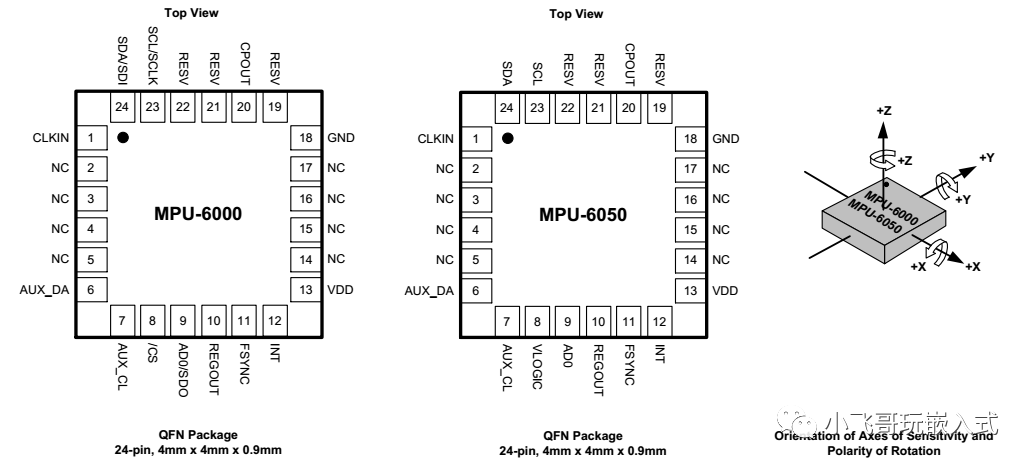
一个片上1024字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用 400kHz的 I2C接口或 1MHz的 SPI接口( SPI仅MPU-6000可用)。对于需要高速传输的应用, 对寄存器的读取和中断可用 20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。芯片尺寸4×4×0.9mm,采用QFN封装(无引线方形封装),可承受最大 10000g的冲击,并有可编程的低通滤波器。
关于电源, MPU-60X0可支持 VDD范围 2.5V±5%, 3.0V±5%,或 3.3V±5%。另外MPU-6050还有一个 VLOGIC引脚,用来为 I2C输出提供逻辑电平。VLOGIC电压可取1.8±5%或者VDD。
系统结构图:
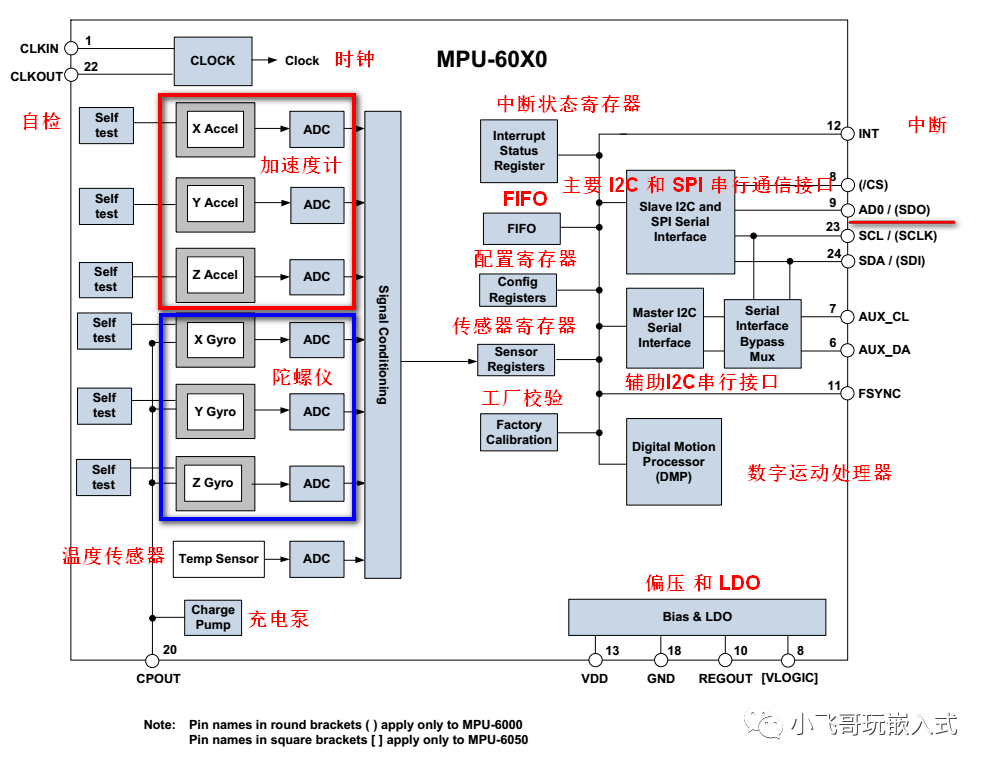
通信接口:
MPU-60X0使用 SPI(仅MPU-6000)或 I2C 串行通信至系统处理器接口。与系统处理器通信时,MPU-60X0始终充当从属设备。LSB的 I2C 从地址的地址由引脚9(AD0)设置(一般接地),本次采用的是IIC的通讯方式,顺便学习一下rt-thread的IIC设备驱动。
六轴,代表的是它内置了一个三轴 MEMS 陀螺仪、一个三轴 MEMS 加速度计,一个数字运动处理引擎(DMP)。它还有用于第三方的数字传感器接口的辅助 I2C 串行接口,比如当辅助 I2C 串行接口连接到一个三轴磁力计,MPU6050 能提供一个完整的九轴融合输出到其主 I2C 端口。
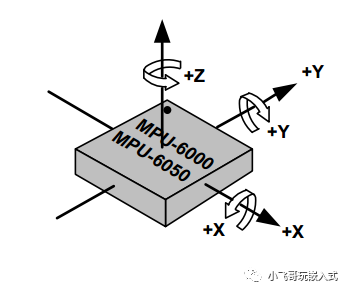
下图标明了传感器的参考坐标系( XYZ组成右手系)以及 3个测量轴和旋转方向。
旋转的正向可用右手螺旋定则判断
数字运动处理器(DMP):
DMP就是MPU6050内部的运动引擎,全称Digital Motion Processor,直接输出四元数,可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合。Motion Driver是Invensense针对其运动传感器的软件包,并非全部开源,核心的算法部分是针对ARM处理器和MSP430处理器编译成了静态链接库,适用于MPU6050、MPU6500、MPU9150、MPU9250等传感器。
FIFO
MPU-60X0包含一个可通过串行接口访问的1024字节FIFO寄存器。FIFO配置寄存器决定哪个数据写入FIFO。可能的选择包括陀螺仪数据,加速计数据,温度读数,辅助传感器读数和 FSYNC 输入。FIFO 计数器跟踪 FIFO 中包含的有效数据字节数。FIFO寄存器支持突发读取。中断功能可用于确定新数据何时可用。
MPU6050的涉及的东西还是很多的,小飞哥也只是简单了解了一些,小伙伴们可以查看手册或者百度,很多优秀的介绍,就不再啰嗦啦
rt-thread软件包使用
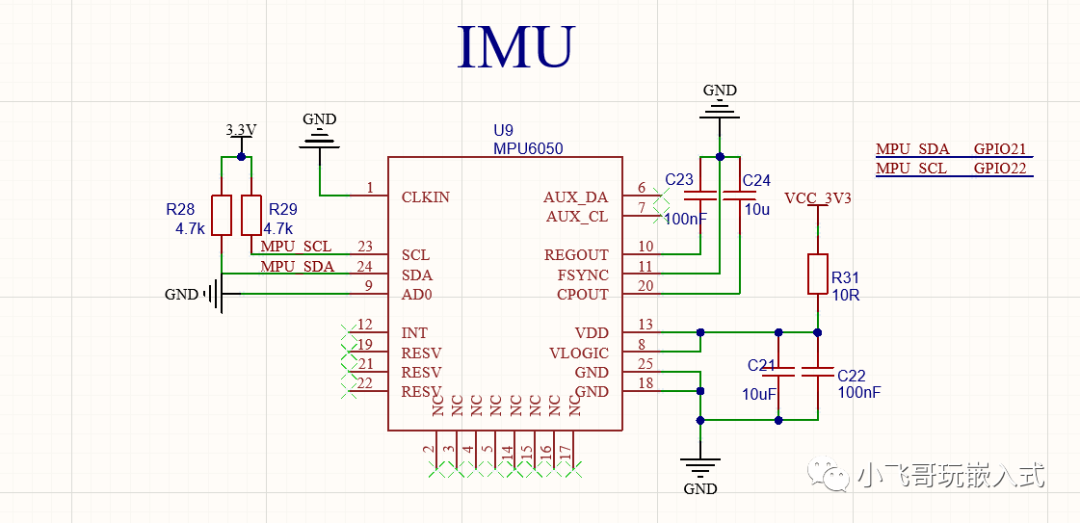
硬件连接
小飞哥使用的是ART-PI及ART-PI扩展板(12月份即将开源发布)
使用到的引脚为:
| MCU | MPU6050 |
|---|---|
| 3.3V | VCC |
| GND | GND |
| PI2 | SDA |
| PI1 | SCL |
小伙伴们可以还根据自己的MCU及使用到的引脚,模拟的IIC,自己看着选就可以啦
硬件连接OK
软件编写
介绍2两种方式,一种是使用rt-thread平台软件包获取MPU6050的数据,自己解算,另一种就是移植DMP库进行解算,小飞哥用的是移植的DMP库来解算的。
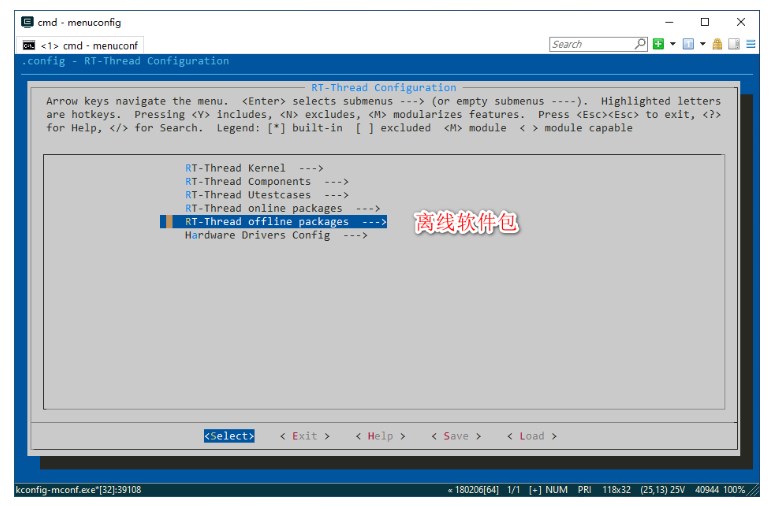
- rtt软件包使用
选择MPU6050软件包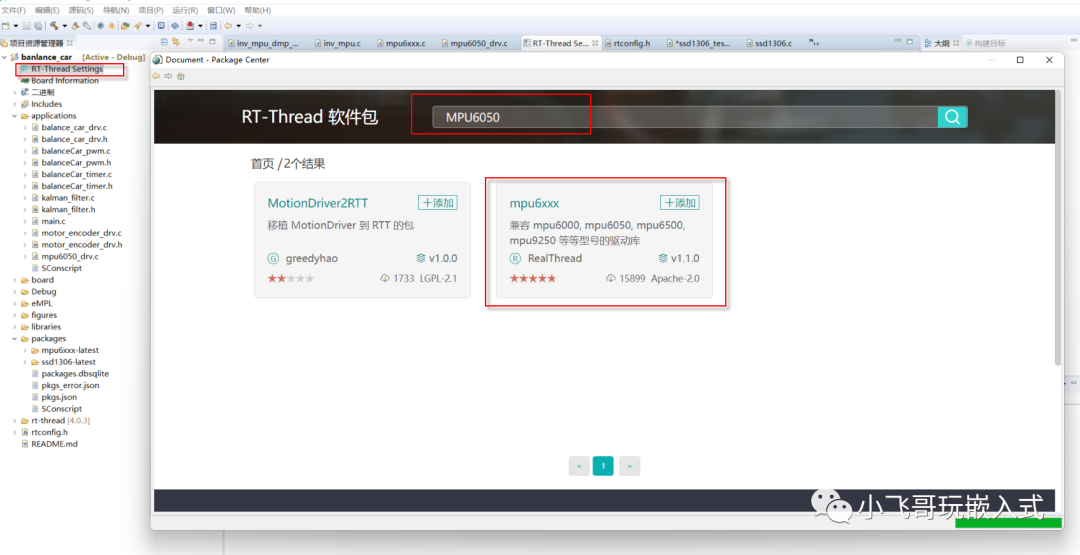
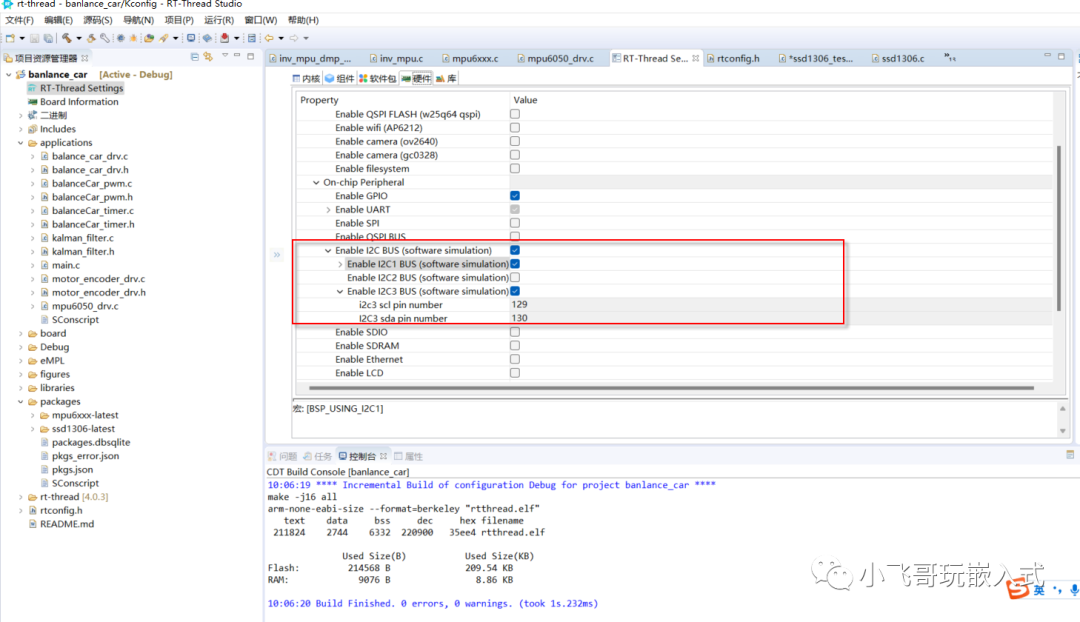
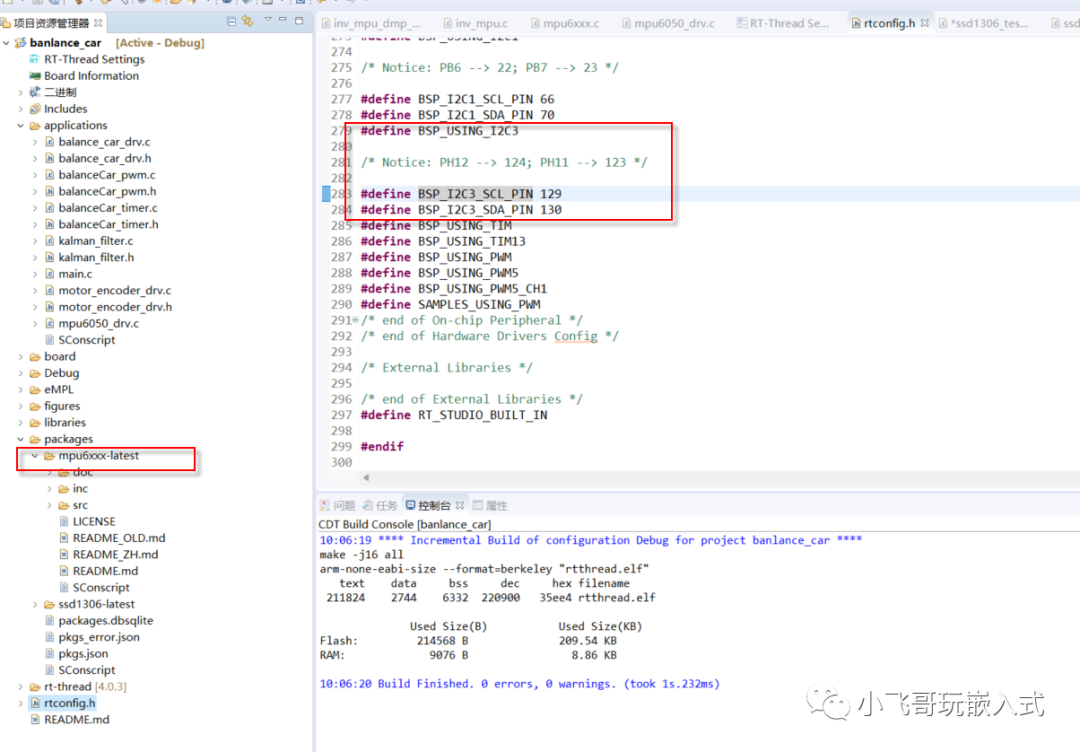
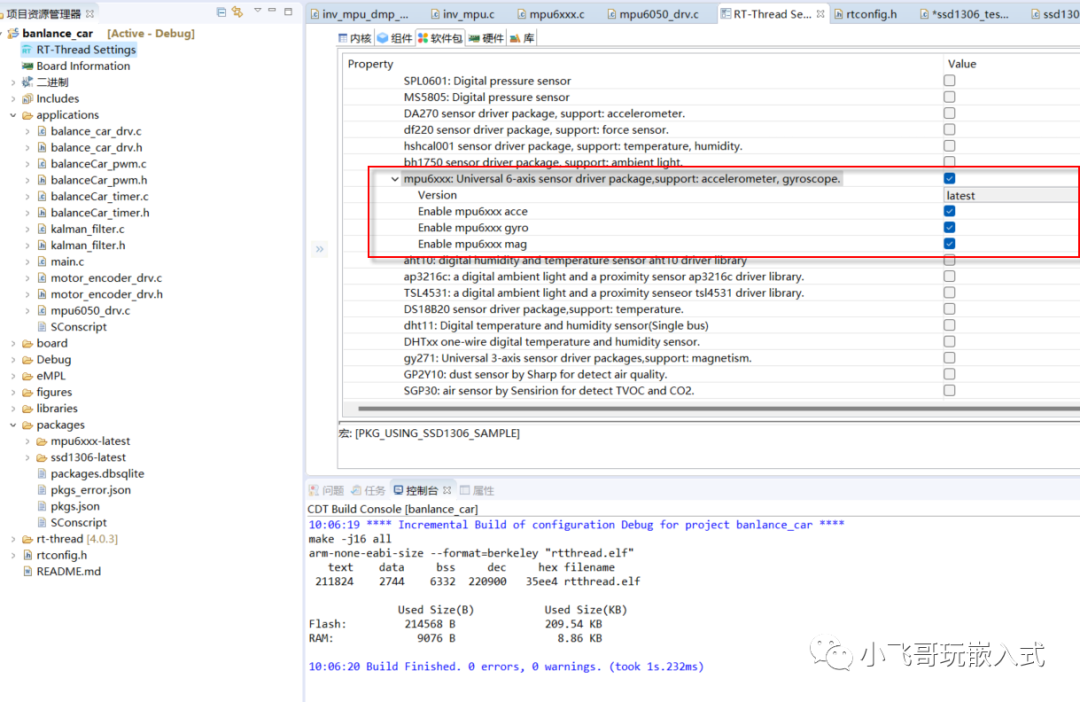 然后选择模拟IIC,可以使用IIC3,也可以使用其他的,和软件包选用的统一就OK了
然后选择模拟IIC,可以使用IIC3,也可以使用其他的,和软件包选用的统一就OK了
设置完成之后,ctrl+S保存即可,软件包自动就下载添加进来了
接下来编写读取函数,直接调用已经封装好的接口即可
先注册设备,初始化
i2c_bus=(structmpu6xxx_device*)mpu6xxx_init(MPU6050_I2C_BUS_NAME,MPU6050_ADDR);//初始化MPU6050,测量单位为角速度,加速度while(count++)
mpu6xxx_set_param(i2c_bus,MPU6XXX_ACCEL_RANGE,MPU6XXX_GYRO_RANGE_2000DPS);//陀螺仪范围配置
mpu6xxx_set_param(i2c_bus,MPU6XXX_ACCEL_RANGE,MPU6XXX_ACCEL_RANGE_2G);//加速度计,一般设置为±2G
mpu6xxx_set_param(i2c_bus,MPU6XXX_SAMPLE_RATE,50);//采样频率
mpu6xxx_set_param(i2c_bus,MPU6XXX_DLPF_CONFIG,25);//数字低通滤波器设置,一般为1/2采样率
然后调用接口:
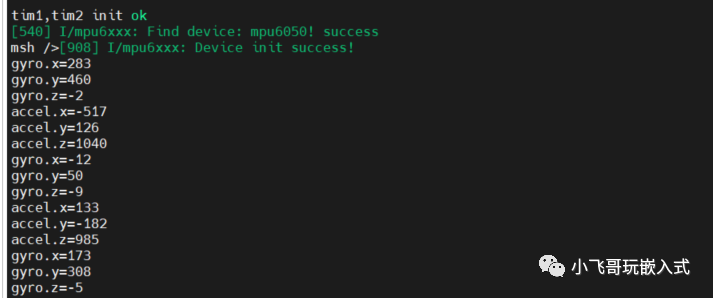
mpu6xxx_get_gyro(i2c_bus,&gyro);
sprintf(str,"gyro.x=%d
",gyro.x);
rt_kprintf(str);
sprintf(str,"gyro.y=%d
",gyro.y);
rt_kprintf(str);
sprintf(str,"gyro.z=%d
",gyro.z);
rt_kprintf(str);
mpu6xxx_get_accel(i2c_bus,&accel);
sprintf(str,"accel.x=%d
",accel.x);
rt_kprintf(str);
sprintf(str,"accel.y=%d
",accel.y);
rt_kprintf(str);
sprintf(str,"accel.z=%d
",accel.z);
rt_kprintf(str);
运行结果:
来看一下,这两个函数的内部封装:
/**
*Thisfunctiongetsthedataofthegyroscope,unit:deg/10s
*Heredeg/10smeans10timeshigherprecisionthandeg/s.
*
*@paramdevthepointerofdevicedriverstructure
*@paramgyrothepointerof3axesstructureforreceivedata
*
*@returnthereadingstatus,RT_EOKreprensentsreadingthedatasuccessfully.
*/
rt_err_tmpu6xxx_get_gyro(structmpu6xxx_device*dev,structmpu6xxx_3axes*gyro)
{
structmpu6xxx_3axestmp;
rt_uint16_tsen;
rt_err_tres;
res=mpu6xxx_get_gyro_raw(dev,&tmp);
if(res!=RT_EOK)
{
returnres;
}
sen=MPU6XXX_GYRO_SEN>>dev->config.gyro_range;
gyro->x=(rt_int32_t)tmp.x*100/sen;
gyro->y=(rt_int32_t)tmp.y*100/sen;
gyro->z=(rt_int32_t)tmp.z*100/sen;
returnRT_EOK;
}
/**
*Thisfunctiongetsthedataoftheaccelerometer,unit:mg
*
*@paramdevthepointerofdevicedriverstructure
*@paramaccelthepointerof3axesstructureforreceivedata
*
*@returnthereadingstatus,RT_EOKreprensentsreadingthedatasuccessfully.
*/
rt_err_tmpu6xxx_get_accel(structmpu6xxx_device*dev,structmpu6xxx_3axes*accel)
{
structmpu6xxx_3axestmp;
rt_uint16_tsen;
rt_err_tres;
res=mpu6xxx_get_accel_raw(dev,&tmp);
if(res!=RT_EOK)
{
returnres;
}
sen=MPU6XXX_ACCEL_SEN>>dev->config.accel_range;
accel->x=(rt_int32_t)tmp.x*1000/sen;
accel->y=(rt_int32_t)tmp.y*1000/sen;
accel->z=(rt_int32_t)tmp.z*1000/sen;
returnRT_EOK;
}
还有获取磁力计、温度的接口,就不再一一列举了,拿到的数据我们可以进行手动解算。
- 移植DMP解算
使用DMP包的话跟rtt的MPU6050的软件包就没有很大关系了,只需要IIC接口就可以了
首先把DMP库文件放到我们的工程中,包含路径到我们的工程中
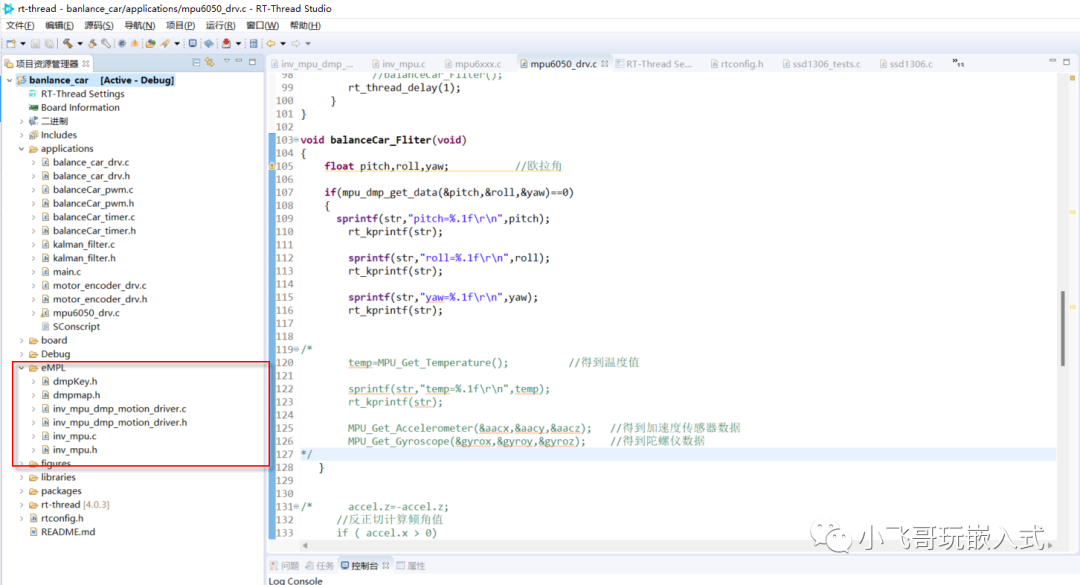
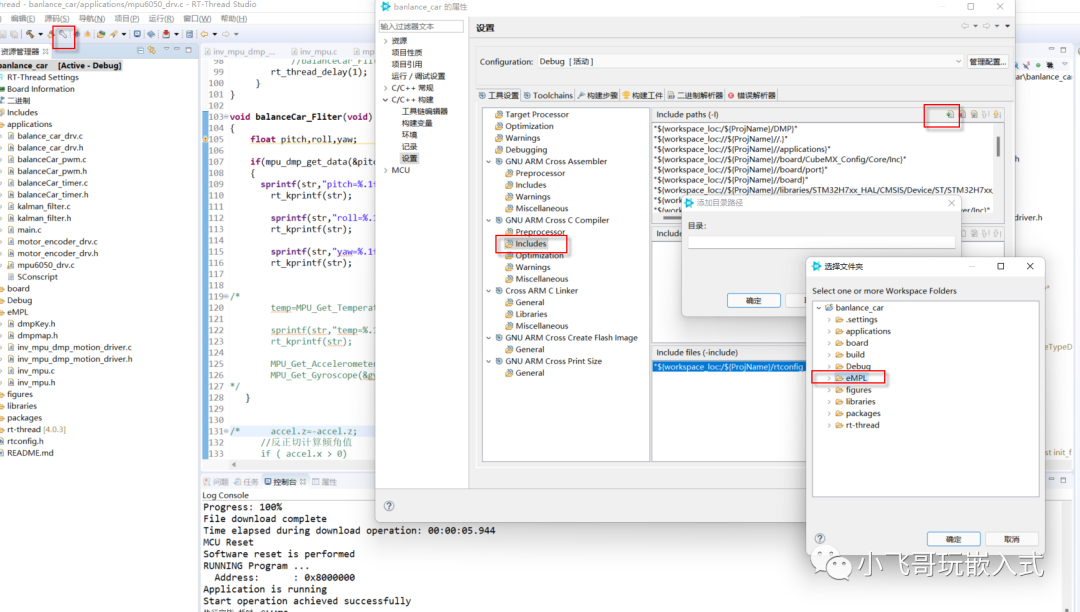
然后就需要编写与DMP库对接的接口了,下面几个是需要我们实现的
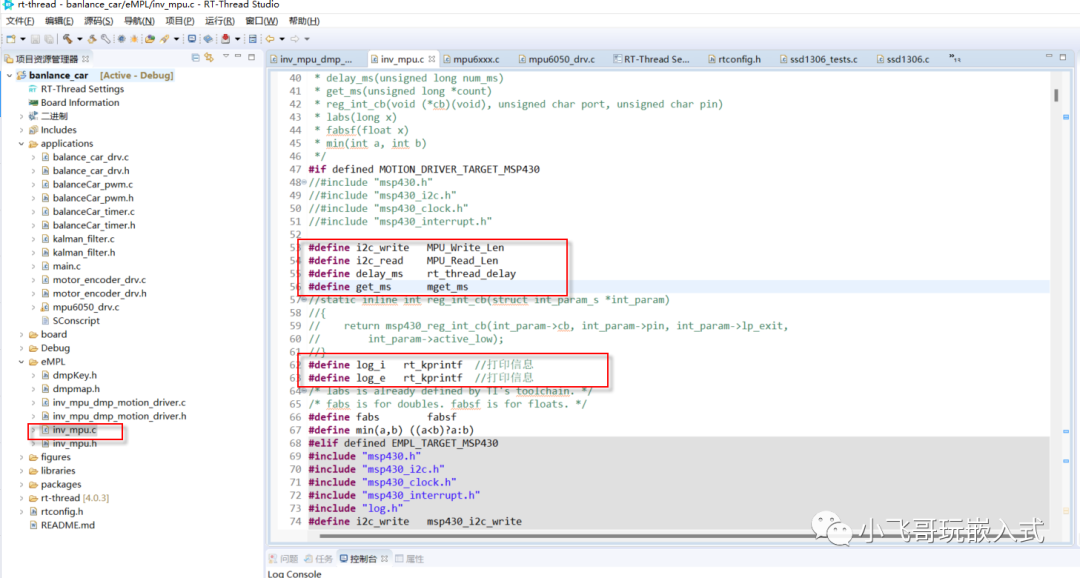
rt_uint8_tMPU_Write_Len(rt_uint8_taddr,rt_uint8_treg,rt_uint8_tlen,rt_uint8_t*databuf)
{
rt_int8_tres=0;
#ifdefRT_USING_I2C
structrt_i2c_msgmsgs;
rt_uint8_tbuf[50]={0};
#endif
buf[0]=reg;
for(inti=0;i1]=databuf[i];
}
if(i2c_bus->bus->type==RT_Device_Class_I2CBUS)
{
msgs.addr=i2c_bus->i2c_addr;/*slaveaddress*/
msgs.flags=RT_I2C_WR;/*writeflag*/
msgs.buf=buf;/*Senddatapointer*/
msgs.len=len+1;
if(rt_i2c_transfer((structrt_i2c_bus_device*)i2c_bus->bus,&msgs,1)==1)
{
res=RT_EOK;
}
else
{
res=-RT_ERROR;
}
}
}
;i++)>
rt_uint8_tMPU_Read_Len(rt_uint8_taddr,rt_uint8_treg,rt_uint8_tlen,rt_uint8_t*buf)
{
rt_int8_tres=0;
#ifdefRT_USING_I2C
structrt_i2c_msgmsgs[2];
#endif
#ifdefRT_USING_SPI
rt_uint8_ttmp;
#endif
if(i2c_bus->bus->type==RT_Device_Class_I2CBUS)
{
msgs[0].addr=i2c_bus->i2c_addr;/*Slaveaddress*/
msgs[0].flags=RT_I2C_WR;/*Writeflag*/
msgs[0].buf=®/*Slaveregisteraddress*/
msgs[0].len=1;/*Numberofbytessent*/
msgs[1].addr=i2c_bus->i2c_addr;/*Slaveaddress*/
msgs[1].flags=RT_I2C_RD;/*Readflag*/
msgs[1].buf=buf;/*Readdatapointer*/
msgs[1].len=len;/*Numberofbytesread*/
if(rt_i2c_transfer((structrt_i2c_bus_device*)i2c_bus->bus,msgs,2)==2)
{
res=RT_EOK;
}
else
{
res=-RT_ERROR;
}
}
returnres;
}
初始化部分我们改为下面这样,只注册IIC设备就行了,其他的配置在DMP中完成:
i2c_bus=(structmpu6xxx_device*)mpu6xxx_init(MPU6050_I2C_BUS_NAME,MPU6050_ADDR);//初始化MPU6050,测量单位为角速度,加速度while(count++)
/*
mpu6xxx_set_param(i2c_bus,MPU6XXX_ACCEL_RANGE,MPU6XXX_GYRO_RANGE_2000DPS);//陀螺仪范围配置
mpu6xxx_set_param(i2c_bus,MPU6XXX_ACCEL_RANGE,MPU6XXX_ACCEL_RANGE_2G);//加速度计,一般设置为±2G
mpu6xxx_set_param(i2c_bus,MPU6XXX_SAMPLE_RATE,50);//采样频率
mpu6xxx_set_param(i2c_bus,MPU6XXX_DLPF_CONFIG,25);//数字低通滤波器设置,一般为1/2采样率
*/
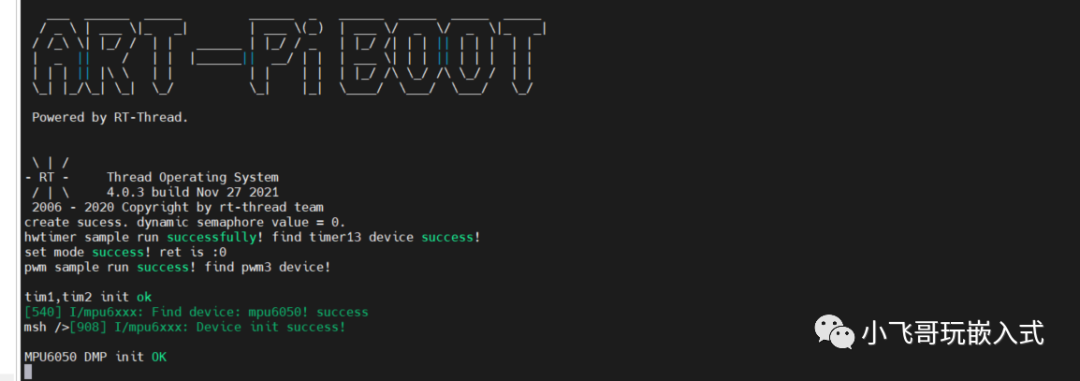
while(mpu_dmp_init())
{
rt_thread_mdelay(500);
rt_kprintf("
MPU6050Error
");
}
rt_kprintf("
MPU6050OK
");
DMP初始化成功
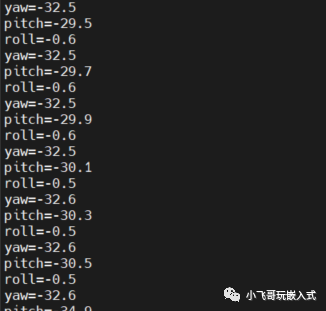
获取结算后的数据:
floatpitch,roll,yaw;//欧拉角
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
sprintf(str,"pitch=%.1f
",pitch);
rt_kprintf(str);
sprintf(str,"roll=%.1f
",roll);
rt_kprintf(str);
sprintf(str,"yaw=%.1f
",yaw);
rt_kprintf(str);
/*
temp=MPU_Get_Temperature();//得到温度值
sprintf(str,"temp=%.1f
",temp);
rt_kprintf(str);
MPU_Get_Accelerometer(&aacx,&aacy,&aacz);//得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);//得到陀螺仪数据
*/
}
至此就结束了,使用库的解算是挺方便的,自己解算其中涉及的计算还是挺麻烦的,本章就不再介绍啦,欢迎做过的小伙伴投稿给我哦!
-
处理器
+关注
关注
68文章
20346浏览量
255392 -
软件包
+关注
关注
0文章
117浏览量
12180 -
MPU6050
+关注
关注
39文章
313浏览量
77325 -
RT-Thread
+关注
关注
32文章
1647浏览量
45316
原文标题:RT-Thread实战笔记|MPU6050使用详解及DMP姿态解算
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

介绍RT-Thread的软件包
STM32F103C8使用RT-Thread软件包系统读取MPU6050数据的方法
RT-Thread 软件包介绍
RT-Thread软件包定义和使用

RT-Thread社区上有哪些优秀的软件包?
STM32F103C8 使用RT-Thread软件包系统读取MPU6050

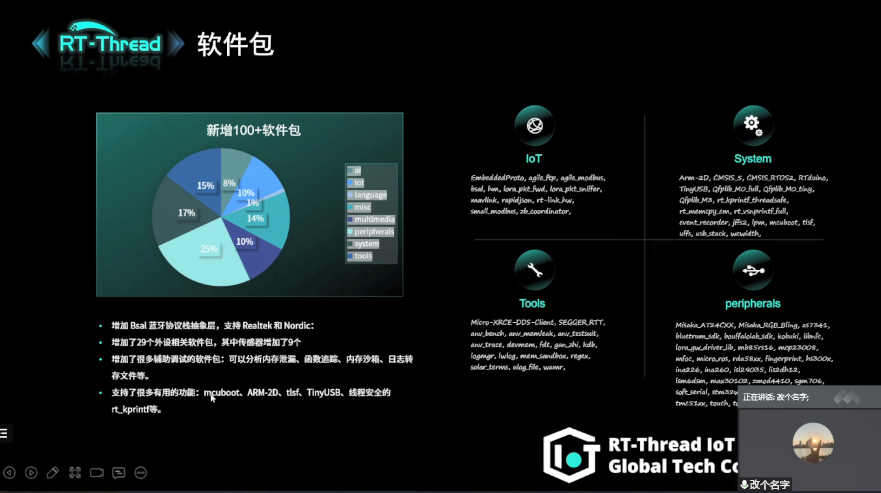
2022 RT-Thread全球技术大会:RT-Thread软件包
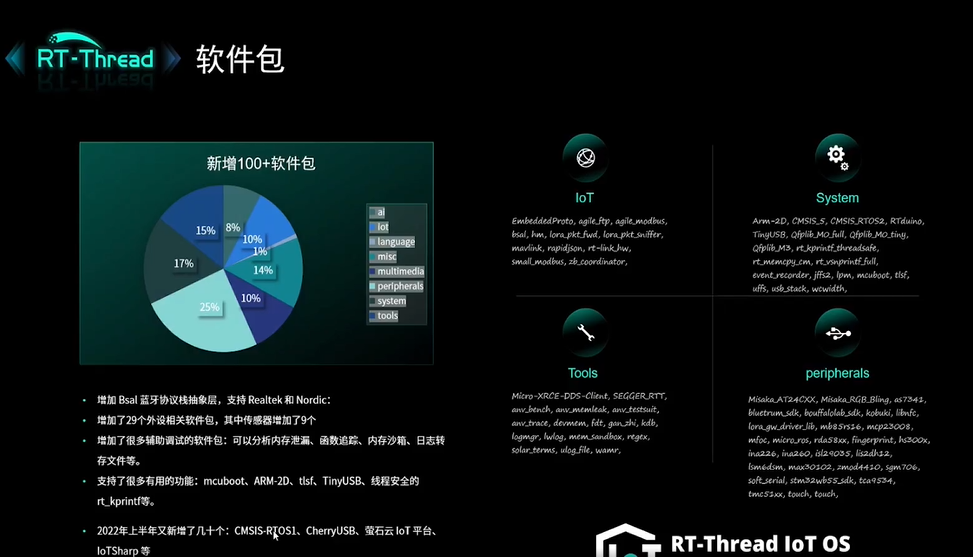
RT-Thread全球技术大会:恩智浦新增100+软件包
RT-Thread在线软件包改为本地软件包的方法
RT-Thread使用cjson软件包发送64位长整型数据

RT-Thread中Agile Modbus软件包的使用方法
RT-Thread中mymqtt软件包的使用方法




评论