 EB定位解决方案在高度自动驾驶中的使用
EB定位解决方案在高度自动驾驶中的使用
使用高清地图数据的高度自动驾驶系统的一个主要先决条件是了解车辆的位置。这个位置需要比单独使用 GNSS 传感器具有更高的精度。因此,可以使用陀螺仪或里程计等各种其他传感器系统来增强位置估计。该贡献描述了一个使用另一个输入 ADASISv3 地图数据来改进定位的系统。地图数据从地图数据库接收,然后与来自摄像系统的交通标志测量值进行比较。
使用定位数据进行定位
EB 定位解决方案在其 EB robinos 定位产品中使用 LbL 数据。该定位产品获取所有可用的定位信息,例如 GPS 和车轮刻度,并尝试将它们组合到可能的最佳位置。此外,它试图通过相应的数学建模来降低每个传感器的个体噪声。结果是改进的全局位置和表示为从驱动开始的累积增量运动的局部位置。
由于这种测量的低频特性,LbL 测量作为连续定位的校正值集成在这个整体定位系统中。每次将 LbL 定位(包括表示为方差的置信度估计)转移到整体定位时,都会通过更新整体定位来计算和校正连续定位的误差。
蓝色标记代表由 ADASISv3 数据提供的地标位置,红色标记显示 LbL 系统相对于车辆位置测量这些地标的位置。这些标记之间的偏移表明定位系统中已经存在累积的定位误差。系统本身估计它位于灰色汽车的位置,但绿色汽车显示的是在将 LbL 测量的校正添加到整体定位后进行定位的位置。
实验结果
为了验证系统功能,LbL 系统安装在 EB 的一辆测试车辆中。它在德国不伦瑞克附近的 A391 高速公路上进行了测试。在这些试驾期间,记录了来自高精度 GPS 系统的位置和来自 LbL 系统的位置。
一辆 2014 年大众高尔夫 7,它配备了来自 OxTS 的差分 GPS 惯性测量单元 RT3003,作为参考传感器。安装的摄像系统是 Mobile Eye 630 型。它通过 CAN 总线提供交通标志测量。此外,定位系统使用车辆传感器来检测车辆主 CAN 总线上的车轮刻度和陀螺仪。由于作者未能直接从主要地图提供商的数据库中获取交通标志信息(数据将于 2019 年晚些时候提供),因此参考数据是从航拍图像中测量的。
如图 7 所示,定位输出系统的两次测量之间的通常创新远低于 0.5m。然而,在大约 2.9 秒时,创新提高到大约 2.5m。在这个时间点,来自交通标志相机的测量被认为是为了校正车辆的位置。如第 5 节中的场景所述,当车辆以大约 80 公里/小时的速度行驶时,车辆检测到两个交通标志并将它们与地图数据库中的两个交通标志进行匹配。两个交通标志在不同的纵向位置被检测到,即使标志如图 5 所示对齐。在本文冷静的时候,无法确定相机是否真的检测到不同位置的标志,或者是否存在延迟。公共汽车造成了位置的差异。

图 7. 包含交通标志在 2.992 s 校正的定位系统的创新。
在图 8 中,绘制了 LbL 测量对单个位置变量的影响。蓝线代表纯粹基于内感受传感器的定位系统的位置。GPS噪声的影响可以从这条线的抖动中看出。LbL 系统以橙色表示。一旦 LbL 在大约 6 秒时测量到一个位置,它对整体位置的影响是可见的,因为可以观察到蓝线中的校正。
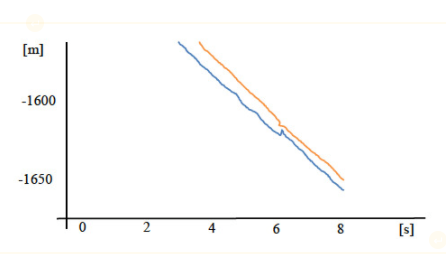
图 8. LbL 测量在大约 6 秒时的影响。
绿色汽车代表在没有 LbL 校正的情况下定位会自行定位的位置。红色汽车显示了 LbL 本地化发生的地方。灰色汽车表示应用了基于 LbL 的位置校正后汽车自身定位的位置。
结论
基于地理参考地标的外部定位系统可以减少这些地标可用的绝对误差。通过这一贡献,作者展示了如何使用通过 ADASISv3 交付的数据来实施此类系统的概念证明。此外,它还描述了系统如何在这个时间点直接使用高清地图数据库。交通标志的参考数据很可能很快就会可用,并且可以替换手动获取的交通标志位置。
该贡献概述了 LbL 系统的处理链。然后将该系统与真实世界的数据一起使用,并且可以显示测量数据的影响。
在 GPS 不可用且内部感知传感器会产生漂移的情况下,使用地标进行定位可以改进定位软件组件。
这一概念验证的开发将在 EB robinos 定位产品中继续进行。目前,EB 为汽车级定位提供了一个功能齐全的定位软件组件,该组件基于车轮刻度、加速度计和其他感知传感器以及用于全球定位的 GPS。该产品的下一代还将包括基于地标的定位以及基于 SLAM 的点云(例如来自 LIDAR 或相机)。
审核编辑:郭婷
-
传感器
+关注
关注
2555文章
51709浏览量
758627 -
gps
+关注
关注
22文章
2910浏览量
167231 -
GNSS
+关注
关注
9文章
808浏览量
48362
发布评论请先 登录
相关推荐
沃尔沃与Waabi携手开发自动驾驶卡车

MEMS技术在自动驾驶汽车中的应用


Mobileye端到端自动驾驶解决方案的深度解析







 工商网监
工商网监
评论