 rt-thread 优化系列(0) SysTick 优化分析
rt-thread 优化系列(0) SysTick 优化分析
前言
论坛里有人提出了一个疑问,说 STM32 系列 bsp 在初始化系统时钟的过程中使用到了 tick ,而 tick 需要初始化并使能 SysTick 中断。但是呢,SysTick 中断中有 rtt 的 tick 以及硬定时器检测,以及可能存在的系统任务调度。初始化时钟是极其早期必须完成的工作,这个时候别说系统了,其它外围设备也没有被初始化。由此产生一个问题,极其早期使用了比较后期的资源,同时,因为需要使用 SysTick 中断而简单粗暴地使用 `__set_PRIMASK` 使能了总中断!!!这是万万不可取的。
有人发现了这一矛盾之处,在[论坛](https://club.rt-thread.org/ask/article/2857.html) 里和 gitee 的 [issue]( https://gitee.com/rtthread/rt-thread/pulls/246) 里也是各执己见,热闹非凡。
下面我讲讲我的处理方案。
理论前提
1. rtt 标榜的是实时操作系统,对于系统中频繁执行的代码需要严格审查,保证没有一行多余代码。(非实时操作系统也不希望自己多数时候空跑一条无用的代码)
2. 中断是个很棘手的东西,在不确定开中断会引起什么后果的时候,坚决不能开中断。
3. rtt 系统启动是有它自己的流程的。分阶段的,任何资源的初始化都有个阶段以及先后顺序。
4. 板级初始化,如非必要,如果可以延迟尽量延迟,先保证 rtt 内核调度运行起来。
基于以上几点,我的修改方案如下。
预初始化 SysTick
上电后,MCU 默认使用的内部晶振,时钟也是默认值,这个时候使用默认值初始化 SysTick,但是**不开启中断**!!!
在 STM32 的 bsp 里,因为有如下调用关系 `rt_hw_board_init` -> `HAL_Init` -> `HAL_InitTick`。
`HAL_InitTick` 在 hal 里是弱实现,'drv_common.c' 重新实现并且是个空函数,这里可以借用一下。
/* re-implement tick interface for STM32 HAL */
HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / RT_TICK_PER_SECOND);
/* Return function status */
return HAL_OK;
}
初始化系统时钟
第二步配置时钟频率,切换内外时钟或者倍频等等操作。中间如果有延时等待的需求,可以使用 SysTick 实现 udelay 短延时,进而通过 while 循环累积达到等待超时的效果。
首先,在 'drv_common.c' 文件里添加 `HAL_uDelay` 微秒延时实现,其实就是调用 `rt_hw_us_delay` 。
然后,在 'stm32xxx_hal_conf.h' 头文件末尾添加一个通用宏定义:
#define HAL_WAITFOR_CONDITION(condition, ms) do { \
uint32_t cnt = 0; \
while((condition)) { \
if (cnt > (ms) * 1000 / 10) \
{ \
return HAL_TIMEOUT; \
} \
HAL_uDelay(10); \
cnt++; \
}\
} while(0)
其中,condition 是等待条件,ms 是等待超时时间。
因为 udelay 了 10us ,所以整体的精度就是 10us ,时间损失可以控制在 10us 内。
涉及到的函数有 `HAL_RCC_OscConfig` `HAL_PWREx_EnableOverDrive` `HAL_RCC_ClockConfig` `HAL_RCCEx_PeriphCLKConfig` 等。
其中一处修改前后
/* Get Start Tick */
tickstart = HAL_GetTick();
/* Wait till HSE is ready */
while(__HAL_RCC_GET_FLAG(RCC_FLAG_HSERDY) == RESET)
{
if((HAL_GetTick() - tickstart ) > HSE_TIMEOUT_VALUE)
{
return HAL_TIMEOUT;
}
}
/* Wait till HSE is ready */
HAL_WAITFOR_CONDITION((__HAL_RCC_GET_FLAG(RCC_FLAG_HSERDY) == RESET), HSE_TIMEOUT_VALUE);
其它地方如法炮制,只是把等待条件和等待时间添加到宏函数里。
rt_hw_board_init 调整
调整后的代码如下:
1. 去掉开启关闭全局中断操作;
2. 提前控制台串口初始化;
3. 堆栈的初始化并不需要那么着急,但是必须在 rt_components_board_init 之前;
4. gpio 初始化也在 rt_components_board_init 之前。
其中 2-4 的调整是调试需求控制台。
最终结果如下。
RT_WEAK void rt_hw_board_init()
{
#ifdef SCB_EnableICache
/* Enable I-Cache---------------------------------------------------------*/
SCB_EnableICache();
#endif
#ifdef SCB_EnableDCache
/* Enable D-Cache---------------------------------------------------------*/
SCB_EnableDCache();
#endif
/* HAL_Init() function is called at the beginning of the program */
HAL_Init();
/* System clock initialization */
SystemClock_Config();
rt_hw_systick_init();
/* USART driver initialization is open by default */
#ifdef RT_USING_SERIAL
rt_hw_usart_init();
#endif
/* Set the shell console output device */
#ifdef RT_USING_CONSOLE
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
/* Pin driver initialization is open by default */
#ifdef RT_USING_PIN
rt_hw_pin_init();
#endif
/* Heap initialization */
#if defined(RT_USING_HEAP)
rt_system_heap_init((void *)HEAP_BEGIN, (void *)HEAP_END);
#endif
/* Board underlying hardware initialization */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
}
修改 `rt_hw_systick_init`
去掉 `rt_hw_systick_init` 函数中使能 SysTick 中断的操作。添加使能 SysTick 中断函数。
void rt_hw_systick_irq_enable(void)
{
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
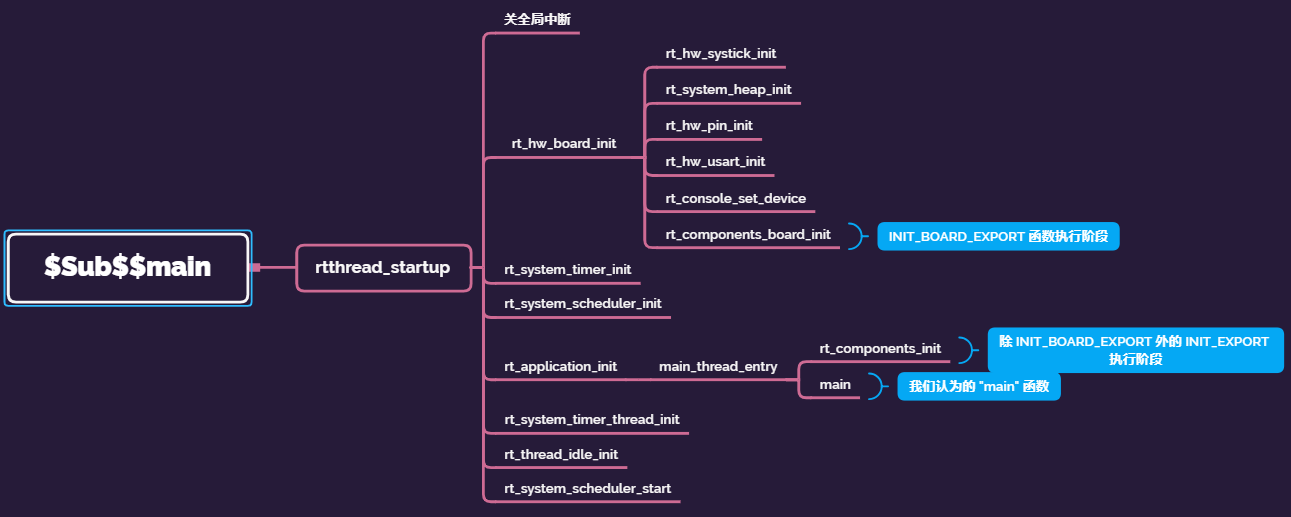
修改 `rtthread_startup`
添加使能 SysTick 中断处理。
rt_hw_systick_irq_enable();
/* start scheduler */
rt_system_scheduler_start();
SysTick_Handler 异常响应
目前,`SysTick_Handler` 函数就下面这么清爽,不需要考虑并行增加 hal 的tick值。
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
运行测试
修改后系统启动正常,运行正常。
RCC 初始化过程如果失败,等待超时也能正常超时返回。
经过初步验证,不使用 SysTick 前提下初始化配置硬件的可行性还是有的。
其它可行性
这次尝试仅限于最小范围,仅仅考虑了系统时钟配置过程,未考虑其它板级外设配置过程。考虑到 hal 是比较庞大的,每次 hal 升级都把所有的 hal 文件修改一遍工作量也是不小的。这样也不方便。如果降低修改范围,只修改 RCC 相关部分,其它外设配置仍然想正常使用 SysTick ,有一种方法就是继续提前系统调度的启动时间点。
鉴于此,系统启动流程大致如下
1. 配置系统时钟,同时配置 SysTick(同前);
2. 初始化 rtt 系统调度器;
3. 初始化 idle 线程;
4. 启动 SysTick 中断;
5. 启动 idle 线程并启动 rtt 系统调度;
6. 由 idle 线程初始化调试串口;
7. 由 idle 线程初始化内存堆;
8. 由 idle 线程调用执行 `rt_components_board_init` 初始化板级外设配置;
9. 由 idle 线程创建 main 和 soft timer 线程。
10. main 线程进行组件初始化配置,以及创建其它应用线程。
由此,可以做到以下几点:
1. 保障所有操作都在是线程中进行的。省去很多 `if (rt_thread_self() != RT_NULL)` 的操作;
2. 保障中断可以及早放心打开;
3. 明确启动流程,确定启动流程每一阶段的工作重点以及必须完成的任务。
缺点,因 idle 线程工作量变多,idle 线程栈可能会比较大。一个空闲线程占用过多的内存也是浪费。另外,多核处理器的 idle 线程数量和核心数量一样,由哪个 idle 线程完成上面的工作也需要做个抉择。
> 本优化系列所有提到的更改已经提交到 gitee ,欢迎大家测试
https://gitee.com/thewon/rt_thread_repo
审核编辑:汤梓红
-
STM32
+关注
关注
2272文章
10923浏览量
357293 -
Systick
+关注
关注
0文章
62浏览量
13134 -
RT-Thread
+关注
关注
31文章
1305浏览量
40338
发布评论请先 登录
相关推荐
RT-Thread记录(二、RT-Thread内核启动流程)
RT-Thread编程指南
RT-Thread用户手册
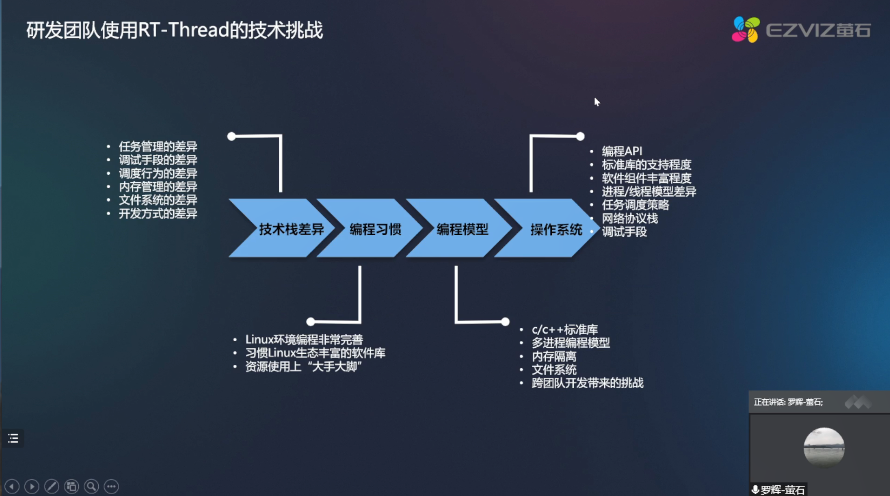
RT-Thread全球技术大会:萤石研发团队使用RT-Thread的技术挑战
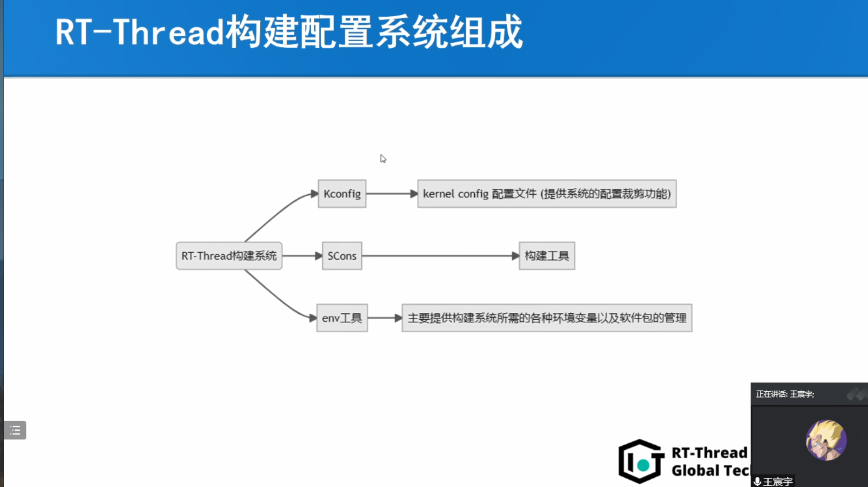
RT-Thread全球技术大会:Kconfig在RT-Thread中的工作机制
RT-Thread全球技术大会:在RT-Thread上编写测试用例
RT-Thread全球技术大会:RT-Thread测试用例集合案例
rt-thread 优化系列(六)启动流程重构
RT-Thread学习笔记 RT-Thread的架构概述

RT-Thread文档_RT-Thread 潘多拉 STM32L475 上手指南


RT-Thread v5.0.2 发布






 工商网监
工商网监
评论