 rt-thread 驱动篇(一) serialX 框架理论
rt-thread 驱动篇(一) serialX 框架理论
前言
苦串口驱动久矣!
现状
串口驱动三种工作模式:轮询、中断、DMA。
轮询模式占用 CPU 最高,但是实现也是最简单的;DMA 占用 CPU 最少,实现也是最麻烦的;中断模式居中。
原串口驱动有以下几个问题:
1. 中断模式,接收有缓存,发送没缓存
2. 中断模式,读操作是非阻塞的,没有阻塞读;写操作因为没有缓存,只能阻塞写,没有非阻塞写。
3. 中断接收过程,每往发送寄存器填充一个字符,就使用完成量等待发送完成中断,通过完成量进行进程调度次数和发送数据量同样多!
4. DMA 模式比较复杂,在实现上更复杂。
1. 首先,接收有两种缓存方案,一种没有缓存,借用应用层的内存直接做 DMA 接收缓存;一种有缓存,用的和中断模式下相同的 fifo 数据结构。发送只有一种缓存方式,把应用层内存放到数据队列里做发送缓存。
2. 无论哪种缓存方案,都没有考虑阻塞的问题。而是抛给串口驱动一个内存地址,就返回到应用层了。应用层要么动用 `rt_device_set_rx_indicate` `rt_device_set_tx_complete` 做同步——退化成 poll 模式,失去了 DMA 的优势;要么继续干其它工作——抛给串口驱动的内存可能引入隐患。
3. 为了防止 DMA 工作的时候又有新的读写需求,
对串口驱动的期望
轮询模式不在今天讨论计划内。下面所有的讨论都只涉及中断和 DMA 两种模式。
- 无论哪种工作模式,都应该有至少一级缓存机制。
- 无论哪种工作模式,都应该可以设置成阻塞或者非阻塞。
- 默认是阻塞 io 模式;如果想用非阻塞工作模式,可以通过 open 或者 control 修改。
- 读写阻塞特性是同步的,不存在阻塞写非阻塞读或者非阻塞写阻塞读两种模式。
- 阻塞读的过程是,没有数据永久阻塞;有数据无论多少(小于等于期望数据量),返回读取的数据量。
- 阻塞写的过程是,缓存空间为 0 阻塞等待缓存被释放;缓存空间不足先填满缓存,继续等待缓存被释放;缓存空间足够,把应用层数据拷贝到驱动缓存。最后返回搬到缓存的数据量。
- 非阻塞读的过程是,没有数据返回 0;有数据,从 fifo 拷贝数据到应用层提供的内存,返回拷贝的数据量。
- 非阻塞写的过程是,缓存为 0 ,返回 0;缓存不足返回写成功了多少数据;缓存足够,把数据搬移完,返回写成功的数据量。
- 无论是轮询、中断、DMA 哪种模式,都应该可以实现 STREAM 特性。
中断模式下的理论实践
注:以下实现是在 NUC970 上完成的,有些特性可能不是通用的。例如,串口外设自带硬件 fifo ,uart1 是高速 uart 设备,fifo 有 64 字节。uart3 的 fifo 就只有 16 字节。
定义缓存数据结构
为实现上述需求,接收和发送都需要有如下一个 fifo
struct rt_serial_fifo
{
rt_uint32_t buf_sz;
/* software fifo buffer */
rt_uint8_t *buffer;
rt_uint16_t put_index, get_index;
rt_bool_t is_full;
};
> 注:别问我为啥不用 ringbuffer
大部分还是借用 `struct rt_serial_rx_fifo` 的实现的。增加了个 `buf_sz` 由 fifo 自己维护自己的缓存容量
针对 fifo 特意定义了三个函数,
`rt_forceinline rt_size_t _serial_fifo_calc_data_len(struct rt_serial_fifo *fifo)` 计算 fifo 中写入的数据量
`rt_forceinline void _serial_fifo_push_data(struct rt_serial_fifo *fifo, rt_uint8_t ch)` 压入一个数据(不完整实现,具体见下文)
`rt_forceinline rt_uint8_t _serial_fifo_pop_data(struct rt_serial_fifo *fifo)` 弹出一个数据(不完整实现,具体见下文)
读设备过程
读设备对应中断接收。
rt_inline int _serial_int_rx(struct rt_serial_device *serial, rt_uint8_t *data, int length)
{
rt_size_t len, size;
struct rt_serial_fifo* rx_fifo;
rt_base_t level;
RT_ASSERT(serial != RT_NULL);
rx_fifo = (struct rt_serial_fifo*) serial->serial_rx;
RT_ASSERT(rx_fifo != RT_NULL);
/* disable interrupt */
level = rt_hw_interrupt_disable();
len = _serial_fifo_calc_data_len(rx_fifo);
if ((len == 0) && // non-blocking io mode
(serial->parent.open_flag & RT_DEVICE_OFLAG_NONBLOCKING) == RT_DEVICE_OFLAG_NONBLOCKING) {
/* enable interrupt */
rt_hw_interrupt_enable(level);
return 0;
}
if ((len == 0) && // blocking io mode
(serial->parent.open_flag & RT_DEVICE_OFLAG_NONBLOCKING) != RT_DEVICE_OFLAG_NONBLOCKING) {
do {
/* enable interrupt */
rt_hw_interrupt_enable(level);
rt_completion_wait(&(serial->completion_rx), RT_WAITING_FOREVER);
/* disable interrupt */
level = rt_hw_interrupt_disable();
len = _serial_fifo_calc_data_len(rx_fifo);
} while(len == 0);
}
if (len > length) {
len = length;
}
/* read from software FIFO */
for (size = 0; size < len; size++)
{
/* otherwise there's the data: */
*data = _serial_fifo_pop_data(rx_fifo);
data++;
}
rx_fifo->is_full = RT_FALSE;
/* enable interrupt */
rt_hw_interrupt_enable(level);
return size;
}
简单说明就是:关中断,计算缓存数据量,如果为空判断是否需要阻塞。拷贝完数据,开中断。
这里需要注意的是,拷贝完数据后 fifo 必然不会是 full 的,`rx_fifo->is_full = RT_FALSE` 这句没有加在 `_serial_fifo_pop_data` 函数,所以上面说它的实现是不完整的。
写设备过程
写设备对应中断发送
rt_inline int _serial_int_tx(struct rt_serial_device *serial, const rt_uint8_t *data, int length)
{
rt_size_t len, length_t, size;
struct rt_serial_fifo *tx_fifo;
rt_base_t level;
rt_uint8_t last_char = 0;
RT_ASSERT(serial != RT_NULL);
tx_fifo = (struct rt_serial_fifo*) serial->serial_tx;
RT_ASSERT(tx_fifo != RT_NULL);
size = 0;
do {
length_t = length - size;
/* disable interrupt */
level = rt_hw_interrupt_disable();
len = tx_fifo->buf_sz - _serial_fifo_calc_data_len(tx_fifo);
if ((len == 0) && // non-blocking io mode
(serial->parent.open_flag & RT_DEVICE_OFLAG_NONBLOCKING) == RT_DEVICE_OFLAG_NONBLOCKING) {
/* enable interrupt */
rt_hw_interrupt_enable(level);
break;
}
if ((len == 0) && // blocking io mode
(serial->parent.open_flag & RT_DEVICE_OFLAG_NONBLOCKING) != RT_DEVICE_OFLAG_NONBLOCKING) {
/* enable interrupt */
rt_hw_interrupt_enable(level);
rt_completion_wait(&(serial->completion_tx), RT_WAITING_FOREVER);
continue;
}
if (len > length_t) {
len = length_t;
}
/* copy to software FIFO */
while (len > 0)
{
/*
* to be polite with serial console add a line feed
* to the carriage return character
*/
if (*data == 'n' &&
(serial->parent.open_flag & RT_DEVICE_FLAG_STREAM) == RT_DEVICE_FLAG_STREAM &&
last_char != 'r')
{
_serial_fifo_push_data(tx_fifo, 'r');
len--;
if (len == 0) break;
last_char = 0;
} else if (*data == 'r') {
last_char = 'r';
} else {
last_char = 0;
}
_serial_fifo_push_data(tx_fifo, *data);
data++; len--; size++;
}
/* if the next position is read index, discard this 'read char' */
if (tx_fifo->put_index == tx_fifo->get_index)
{
tx_fifo->is_full = RT_TRUE;
}
// TODO: start tx
serial->ops->start_tx(serial);
/* enable interrupt */
rt_hw_interrupt_enable(level);
} while(size < length);
return size;
}
简单说明就是:关中断,计算 fifo 剩余容量,如果空间不足判断是否阻塞。拷贝数据,开中断。
如果数据没拷贝完,继续上述过程,直到所有数据拷贝完成。
上述函数也实现了 STREAM 打开模式,检查 “r”“n” 不完整的问题。
特别注意:上述函数并没有执行写“发送寄存器”的操作,开中断前,这里执行了一句 `serial->ops->start_tx(serial)` 用于开启发送过程(这个的实现可能在不同芯片上略有差异)。
中断接收
while (1) {
ch = serial->ops->getc(serial);
if (ch == -1) break;
/* if fifo is full, discard one byte first */
if (rx_fifo->is_full == RT_TRUE) {
rx_fifo->get_index += 1;
if (rx_fifo->get_index >= rx_fifo->buf_sz) rx_fifo->get_index = 0;
}
/* push a new data */
_serial_fifo_push_data(rx_fifo, ch);
/* if put index equal to read index, fifo is full */
if (rx_fifo->put_index == rx_fifo->get_index)
{
rx_fifo->is_full = RT_TRUE;
}
}
rt_completion_done(&(serial->completion_rx));
注:这里的 while 循环是因为 uart 外设自带硬件 fifo。
简单讲就是,有接收中断,就往接收 fifo 中压入数据,如果 fifo 是满的,丢弃掉旧数据。
中断发送
/* calucate fifo data size */
len = _serial_fifo_calc_data_len(tx_fifo);
if (len == 0) {
// TODO: stop tx
serial->ops->stop_tx(serial);
rt_completion_done(&(serial->completion_tx));
break;
}
if (len > 64) {
len = 64;
}
/* read from software FIFO */
while (len > 0) {
/* pop one byte data */
ch = _serial_fifo_pop_data(tx_fifo);
serial->ops->putc(serial, ch);
len--;
}
tx_fifo->is_full = RT_FALSE;
先计算是否还有数据要发送,如果没有,调用 `serial->ops->stop_tx(serial)` 对应上面的 `serial->ops->start_tx(serial)` 。
因为硬件自带 fifo ,这里最多可以连续写 64 个字节。
因为发送 fifo 是往外弹出数据的,最后肯定是非满的。
未说明的问题
对于串口设备来讲,接收是非预期的,所以串口接收中断必须一直开着。发送就不一样了,没有发送数据的时候是可以不开发送中断的。
上文中提到的两个 ops `start_tx` `stop_tx` 正是开发送中断使能,关发送中断使能。另外,它俩还有更重要的作用。
在 NUC970 的设计上,只要发送寄存器为空就会有发送完成中断,并不是发送完最后一个字节才产生。正因为这个特性,当开发送中断使能的时候会立马进入中断。在中断里判断是否有数据要发送,刚好可以作为“启动发送”。
对于其它芯片,如果发送中断的含义是“发送完最后一个字节”,仅仅使能发送中断还不够,还需要软件触发发送中断。这是发送不同于接收的最重要的地方。
DMA 模式下的实现探讨
为什么上一节叫实践,这一节变成探讨了?
第一,笔者还没时间在 NUC970 上完成 DMA 的部分。
第二,有了上面中断模式的铺垫,DMA 模式也是轻车熟路。不觉得 NUC970 的硬件 fifo 就是 DMA 的翻版吗?
DMA 模式需要二级缓存机制。第一级缓存和中断模式用的 fifo 一样。这样 read write 两个函数的实现可以是一样的。
在此基础上,增加一个数组。如下是完整串口设备定义:
struct rt_serial_device
{
struct rt_device parent;
const struct rt_uart_ops *ops;
struct serial_configure config;
void *serial_rx;
void *serial_tx;
rt_uint8_t serial_dma_rx[64];
rt_uint8_t serial_dma_tx[64];
cb_serial_tx _cb_tx;
cb_serial_rx _cb_rx;
struct rt_completion completion_tx;
struct rt_completion completion_rx;
};
typedef struct rt_serial_device rt_serial_t;
这两个数组作为 DMA 收发过程的缓存。
发送数据时,从 serial_tx 的 fifo 拷贝数据到 serial_dma_tx ,启动 DMA。发送完成后判断 serial_tx 的 fifo 是否还有数据,有数据继续拷贝,直到 fifo 为空关闭 DMA 发送。
接收数据时,在 DMA 中断里拷贝 `serial_dma_rx` 所有数据到 serial_rx 的 fifo 。如果 DMA 中断分完成一半中断和全部传输完成两种中断。可以分成两次中断,每次只处理一半数据,这样每次往 fifo 倒腾数据的时候,还有一半缓冲区可用,也不至于会担心仓促。
我们需要做的工作只有“怎么安全有效启动 DMA 发送”。
底层驱动
以上都是串口设备驱动框架部分,下面说说和芯片操作紧密相关的部分
init 函数,负责注册设备到设备树。
configure 函数,负责串口外设初始化,包括波特率、数据位、流控等等。还有个重要的工作就是调用引脚复用配置函数。
control 函数,使能禁用收发等中断。
putc 函数,负责写发送寄存器,写寄存器前一定先判断发送寄存器是否可写是否为空,阻塞等。
getc 函数,负责读接收寄存器,读寄存器前一定先判断是否有有效数据,如果没有返回 -1。
start_tx 函数,使能发送中断,如果发送寄存器为空,触发发送中断。(如果芯片没有这个特性,需要想办法触发发送完成中断)
stop_tx 函数,禁用发送中断。
中断回调函数,负责处理中断,根据中断状态调用 `rt_hw_serial_isr` 函数。
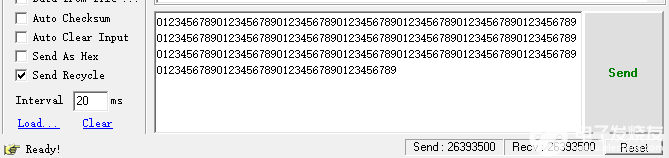
实机验证
中断模式在 NUC970 芯片下经过**千万级数据**收发测试的考验。测试环境有如下两种:
1. 非阻塞 io;波特率 9600;串口调试工具:USR-TCP232 ,USR 出的调试工具。
串口调试工具定时 50ms 发送 30 个字符。NUC970 接收到数据后返回接收到的数据。
2. 阻塞 io;波特率 115200;串口调试工具:USR-TCP232 ,USR 出的调试工具。
串口调试工具定时 10ms 发送 30 个字符。NUC970 接收到数据后返回接收到的数据。(串口调试助手发送了 200w 字节数据,接收到了相同个数字符!)

结论
因为 NUC970 芯片的特殊性,上面虽说使用的是中断模式,其实和 DMA 有点儿类似了。假如是没收发一个字节数据各对应一次中断,中断次数会比较多。
但是,在应用层来看,无论是中断还是 DMA 都是一样的——要么阻塞,要么非阻塞。
审核编辑:汤梓红
-
中断
+关注
关注
5文章
900浏览量
41677 -
dma
+关注
关注
3文章
566浏览量
100870 -
串口驱动
+关注
关注
2文章
82浏览量
18722 -
RT-Thread
+关注
关注
31文章
1305浏览量
40331 -
serialX
+关注
关注
0文章
7浏览量
811
发布评论请先 登录
相关推荐
RT-Thread记录(一、版本开发环境及配合CubeMX)

rt-thread 驱动篇(六)serialX弊端及解决方法
基于RT-Thread的RoboMaster电控框架设计
RT-Thread Studio驱动SD卡

RT-Thread全球技术大会:RT-Thread上的单元测试框架与运行测试用例
浅析RT-Thread设备驱动框架
基于 RT-Thread 的 RoboMaster 电控框架(一)
基于RT-Thread的RoboMaster电控框架(二)
《RT-Thread设备驱动开发指南》基础篇--以先楫bsp的hwtimer设备为例






 工商网监
工商网监
评论