 UART自动波特率识别程序设计方案
UART自动波特率识别程序设计方案
串口(UART)是嵌入式里最基础最常用也最简单的一种通讯(数据传输)方式,可以说是工程师入门通讯领域的启蒙老师,同时串口打印也是嵌入式项目里非常经典的调试与交互方式。
最精简的串口仅使用两根单向信号线:TXD、RXD,这两根信号线是独立工作的,因此数据收发既可分开也可同时进行,这就是所谓的全双工。串口没有主从机概念,并且没有专门的时钟信号 SCK,所以串口通信也属于异步传输。
说到异步传输,这就不得不提波特率(每秒钟传输bit数)的问题了,通信双方必须使用一致的波特率才能完成正确的数据传输。正常情况下,我们都是为两个串口设备事先约定好波特率,比如 MCU 与上位机通信,在 MCU 程序里按 115200 的波特率去初始化 UART 外设,然后上位机串口调试助手也设置 115200 波特率,双方再联合工作。
有时候,我们也希望能有一种灵活的波特率约定方式,比如建立通信前,在上位机串口调试助手里随意设置一种波特率,然后按这个波特率发送数据,MCU 端能自动识别出这个波特率,并用识别出来的波特率去初始化 UART 外设,然后再进行后续数据传输,这种方式就叫自动波特率识别。痞子衡今天要分享的就是在 MCU 里实现自动波特率识别的程序设计:
程序主页:https://github.com/JayHeng/cortex-m-apps/tree/master/components/autobaud
一、串口(UART)自动波特率识别程序设计
1.1 函数接口定义
首先是设计自动波特率识别程序头文件:autobaud.h ,这个头文件里直接定义如下 3 个接口函数原型。涵盖必备的初始化流程 init()、deinit(),以及最核心的波特率识别功能 get_rate()。
//!@brief初始化波特率识别
void
autobaud_init
(
void
);
//!@brief检测波特率识别是否已完成,并获取波特率值
bool
autobaud_get_rate
(
uint32_t
*rate);
//!@brief关闭波特率识别
void
autobaud_deinit
(
void
);
1.2 识别设计思想
关于识别,因为上位机数据是从 RXD 引脚过来的,所以在 MCU 里需要先将 RXD 引脚配置成普通数字输入 GPIO(这个引脚需要上拉,默认保持高电平),然后检测这个 GPIO 的电平跳变(一般用下降沿)并计时。
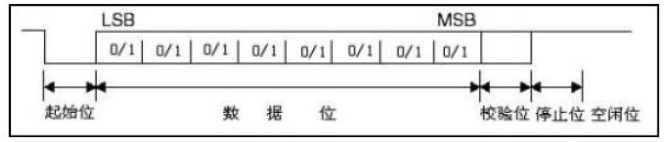
下图是典型的 UART 单字节传输时序,I/O 空闲状态是高电平,传输时总是由 1bit 低电平起始位开启,然后是从 LSB 到 MSB 的 8bit 数据位,校验位是可选项(我们暂不开启),最后由 1bit 高电平停止位结束,I/O 回归高电平空闲状态。
Note 1:检测下降沿跳变,是因为 I/O 空闲为高,起始位的存在保证了每 Byte 传输周期总是从下降沿开始。
Note 2:起始位和停止位两个 bit 的存在还兼有波特率容错的功能,通信双方波特率在 3% 的误差内数据传输均可以正常进行。
虽然我们不需要约定上位机波特率,但是要想实现波特率自动识别,上位机初始传输的数据却必须要事先约定好(可理解为接头暗号),这涉及到 MCU 里检测电平跳变次数与相应计时计算。MCU识别完成后将暗号发回给上位机确认。
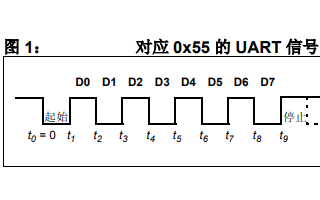
痞子衡设计的接头暗号是 0x5A, 0xA6 两个字节,两字节暗号相比单字节暗号容错性更好一些(以防 I/O 上有干扰,导致误识别),根据指定的暗号和 UART 传输时序图,我们很容易得到如下常量定义:
enum
_autobaud_counts
{
//!0x5A字节对应的下降沿个数
kFirstByteRequiredFallingEdges=
4
,
//!0xA6字节对应的下降沿个数
kSecondByteRequiredFallingEdges=
3
,
//!0x5A字节(从起始位到停止位)第一个下降沿到最后一个下降沿之间的实际bit数
kNumberOfBitsForFirstByteMeasured=
8
,
//!0xA6字节(从起始位到停止位)第一个下降沿到最后一个下降沿之间的实际bit数
kNumberOfBitsForSecondByteMeasured=
7
,
//!两个下降沿之间允许的最大超时(us)
kMaximumTimeBetweenFallingEdges=
80000
,
//!对实际检测出的波特率值做对齐处理,以便于更好地配置UART模块
kAutobaudStepSize=
1200
};
上述常量定义里,kMaximumTimeBetweenFallingEdges 指定了两个下降沿之间允许的最大时间间隔,超过这个时间,自动波特率程序将丢掉前面统计的下降沿个数,重头开始识别,这个设计也是为了防止 I/O 上有电平干扰,导致误识别。
kAutobaudStepSize 常量是为了对检测出的波特率值做对齐处理,公式是 rounded = stepSize * (value/stepSize + 0.5),其中 value 是实际检测出的波特率值,rounded 是对齐后的波特率值,用对齐后的波特率值能更好地配置UART外设(这跟UART模块里波特率发生器SBR设计有关)。
最后就是 I/O 电平下降沿检测方法设计,这里既可以用软件查询(就是循环读取 I/O 输入电平,比较当前值与上一次值的差异),也可以使用GPIO模块自带的边沿中断功能。推荐使用后者,一方面计时更精确,另外也不用阻塞系统。检测到下降沿发生就调用一次如下 pin_transition_callback() 函数,在这个函数里统计跳变次数以及计时。
//!@brief管脚下降沿跳变回调函数
static
void
pin_transition_callback
(
void
);
1.3 主代码实现
根据上一小节描述的设计思想,我们很容易写出下面的主代码(autobaud_irq.c),代码里痞子衡都做了详细注释。有一点要提的是关于其中系统计时。
//!@brief使能GPIO管脚中断
extern
void
enable_autobaud_pin_irq
(
pin_irq_callback_t
func);
//!@brief关闭GPIO管脚中断
extern
void
disable_autobaud_pin_irq
(
void
);
//!< 已检测到的下降沿个数
static
uint32_t
s_transitionCount;
//!< 0x5A 字节检测期间内对应计数值
static
uint64_t
s_firstByteTotalTicks;
//!< 0xA6 字节检测期间内对应计数值
static
uint64_t
s_secondByteTotalTicks;
//!< 上一次下降沿发生时系统计数值
static
uint64_t
s_lastToggleTicks;
//!< 下降沿之间最大超时对应计数值
static
uint64_t
s_ticksBetweenFailure;
void
autobaud_init
(
void
)
{
s_transitionCount=
0
;
s_firstByteTotalTicks=
0
;
s_secondByteTotalTicks=
0
;
s_lastToggleTicks=
0
;
//计算出下降沿之间最大超时对应计数值
s_ticksBetweenFailure=microseconds_convert_to_ticks(kMaximumTimeBetweenFallingEdges);
//使能GPIO管脚中断,并注册中断处理回调函数
enable_autobaud_pin_irq(pin_transition_callback);
}
void
autobaud_deinit
(
void
)
{
//关闭GPIO管脚中断
disable_autobaud_pin_irq();
}
bool
autobaud_get_rate
(
uint32_t
*rate)
{
if
(s_transitionCount==(kFirstByteRequiredFallingEdges+kSecondByteRequiredFallingEdges))
{
//计算出实际检测到的波特率值
uint32_t
calculatedBaud=
(microseconds_get_clock()*(kNumberOfBitsForFirstByteMeasured+kNumberOfBitsForSecondByteMeasured))/
(
uint32_t
)(s_firstByteTotalTicks+s_secondByteTotalTicks);
//对实际检测出的波特率值做对齐处理
//公式:rounded = stepSize *(value/stepSize + .5)
*rate=((((calculatedBaud*
10
)/kAutobaudStepSize)+
5
)/
10
)*kAutobaudStepSize;
return
true
;
}
else
{
return
false
;
}
}
void
pin_transition_callback
(
void
)
{
//获取当前系统计数值
uint64_t
ticks=microseconds_get_ticks();
//计数这次检测到的下降沿
s_transitionCount++;
//如果本次下降沿与上次下降沿之间间隔过长,则从头开始检测
uint64_t
delta=ticks-s_lastToggleTicks;
if
(delta>s_ticksBetweenFailure)
{
s_transitionCount=
1
;
}
switch
(s_transitionCount)
{
case
1
:
//0x5A字节检测时间起点
s_firstByteTotalTicks=ticks;
break
;
case
kFirstByteRequiredFallingEdges:
//得到0x5A字节检测期间内对应计数值
s_firstByteTotalTicks=ticks-s_firstByteTotalTicks;
break
;
case
(kFirstByteRequiredFallingEdges+
1
):
//0xA6字节检测时间起点
s_secondByteTotalTicks=ticks;
break
;
case
(kFirstByteRequiredFallingEdges+kSecondByteRequiredFallingEdges):
//得到0xA6字节检测期间内对应计数值
s_secondByteTotalTicks=ticks-s_secondByteTotalTicks;
//关闭GPIO管脚中断
disable_autobaud_pin_irq();
break
;
}
//记录本次下降沿发生时系统计数值
s_lastToggleTicks=ticks;
}
二、串口(UART)自动波特率识别程序实现
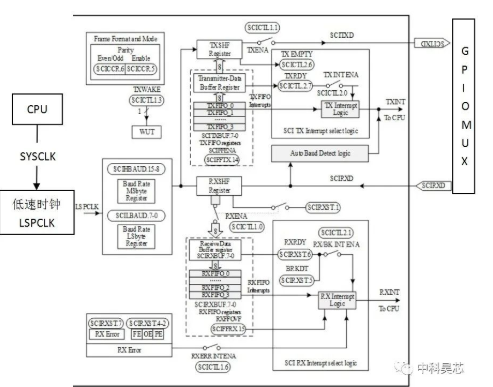
前面讲的都是硬件无关设计,但最终还是要落实到具体 MCU 平台上的,其中 GPIO 中断部分是跟 MCU 紧相关的。我们以恩智浦 i.MXRT1011 为例来介绍硬件实现。
2.1 管脚中断方式实现(基于i.MXRT1011)
恩智浦 MIMXRT1010-EVK 有板载调试器 DAPLink,这个 DAPLink 中也集成了 USB 转串口的功能,对应的 UART 引脚是 IOMUXC_GPIO_09_LPUART1_RXD 和 IOMUXC_GPIO_10_LPUART1_TXD,我们就选用这个管脚 GPIO1[9] 做自动波特率检测,实现代码如下:
BSP程序:https://github.com/JayHeng/cortex-m-apps/tree/master/apps/autobaud_imxrt1011/bsp/src/pinmux_utility.c
typedef
void
(*
pin_irq_callback_t
)(
void
);
static
pin_irq_callback_t
s_pin_irq_func;
//!@briefUART引脚功能切换函数
void
uart_pinmux_config
(
bool
setGpio)
{
if
(setGpio)
{
IOMUXC_SetUartAutoBaudPinMode(IOMUXC_GPIO_09_GPIOMUX_IO09,GPIO1,
9
);
}
else
{
IOMUXC_SetUartPinMode(IOMUXC_GPIO_09_LPUART1_RXD);
IOMUXC_SetUartPinMode(IOMUXC_GPIO_10_LPUART1_TXD);
}
}
//!@brief使能GPIO管脚中断
void
enable_autobaud_pin_irq
(
pin_irq_callback_t
func)
{
s_pin_irq_func=func;
//开启GPIO1_9下降沿中断
GPIO_SetPinInterruptConfig(GPIO1,
9
,kGPIO_IntFallingEdge);
GPIO1->IMR|=(
1U
<<
9
);
NVIC_SetPriority(GPIO1_Combined_0_15_IRQn,
1
);
NVIC_EnableIRQ(GPIO1_Combined_0_15_IRQn);
}
//!@briefGPIO中断处理函数
void
GPIO1_Combined_0_15_IRQHandler
(
void
)
{
uint32_t
interrupt_flag=(
1U
<<
9
);
//仅当GPIO1_9中断发生时
if
((GPIO_GetPinsInterruptFlags(GPIO1)&interrupt_flag)&&s_pin_irq_func)
{
//执行一次回调函数
s_pin_irq_func();
GPIO_ClearPinsInterruptFlags(GPIO1,interrupt_flag);
}
}
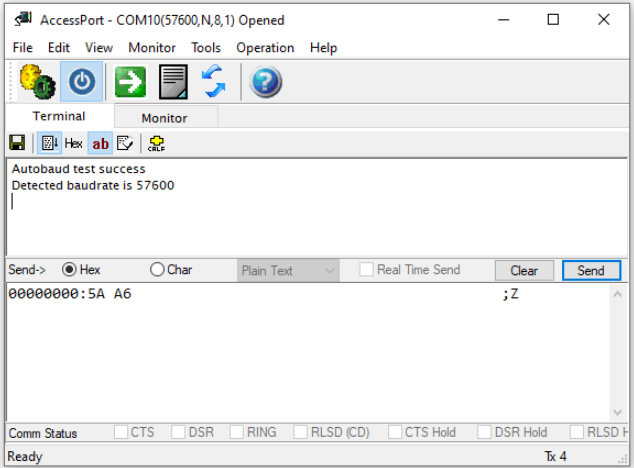
2.2 在MIMXRT1010-EVK上实测
一切就绪,我们现在来实测一下,主函数流程很简单,测试结果也表明达到了预期效果,每次将 MCU 程序复位运行后,串口调试助手里可任意设置波特率。
int
main
(
void
)
{
//略去系统时钟配置...
//初始化定时器
microseconds_init();
//将GPIO1_9先配成输入GPIO
bool
setGpio=
true
;
uart_pinmux_config(setGpio);
//初始化波特率识别
autobaud_init();
//检测波特率识别是否已完成,并获取波特率值
uint32_t
baudrate;
while
(!autobaud_get_rate(&baudrate));
//关闭波特率识别
autobaud_deinit();
//配置UART1引脚
setGpio=
false
;
uart_pinmux_config(setGpio);
//初始化UART1外设
uint32_t
uartClkSrcFreq=BOARD_DebugConsoleSrcFreq();
DbgConsole_Init(
1
,baudrate,kSerialPort_Uart,uartClkSrcFreq);
PRINTF(
"Autobaudtestsuccess\r\n"
);
PRINTF(
"Detectedbaudrateis%d\r\n"
,baudrate);
while
(
1
);
}
至此,嵌入式里串口(UART)自动波特率识别程序设计与实现痞子衡便介绍完毕了,
-
mcu
+关注
关注
146文章
17083浏览量
350741 -
嵌入式
+关注
关注
5081文章
19077浏览量
304360 -
uart
+关注
关注
22文章
1232浏览量
101305
发布评论请先 登录
相关推荐
什么是串口波特率?串口波特率的分类及应用详解

芯海应用笔记:通用 MCU USART 自动波特率检测
自动波特率检测
怎么使用UART设置中的自动波特率?
在dsPIC30F器件上实现自动波特率检测 AN962中文资
在dsPIC30F器件上实现自动波特率检测的详细中文资料概述
在dsPIC30F器件上实现自动波特率检测
痞子衡嵌入式:嵌入式里串口(UART)自动波特率识别程序设计与实现(轮询)

SCI串口自动波特率介绍
STM32的USART自动波特率检测
uart波特率和传输频率的关系 UART串口的常用波特率为多少

MCU串口自动识别波特率原理分析






 工商网监
工商网监
评论