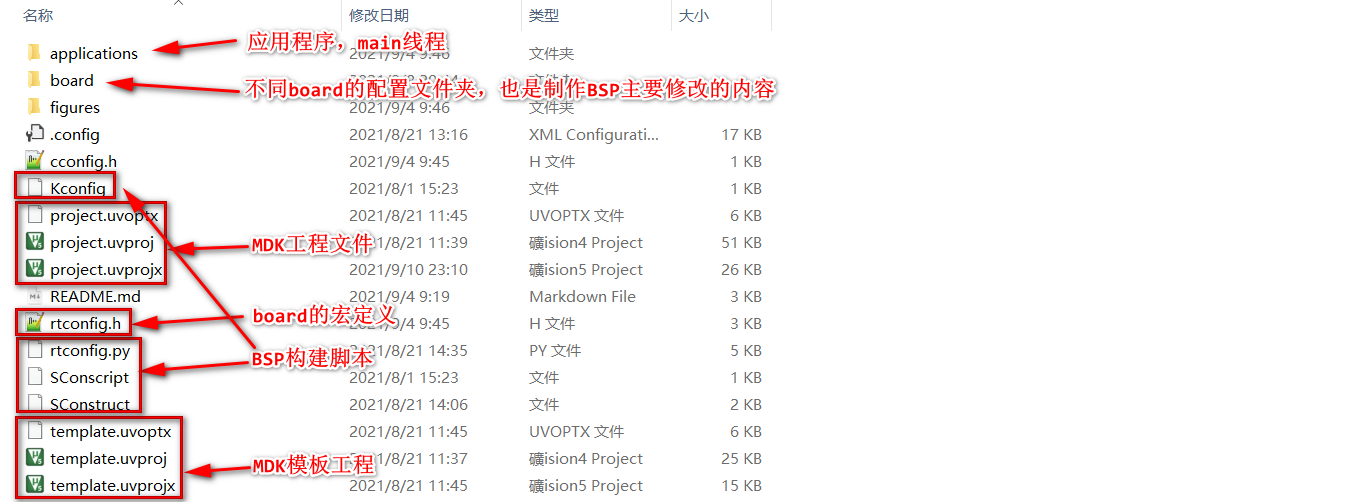
 GD32407V-START开发板的BSP框架制作与移植
GD32407V-START开发板的BSP框架制作与移植
手把手教你使用RT-Thread制作GD32 ARM系列BSP
熟悉RT-Thread的朋友都知道,RT-Thread提供了许多BSP,但不是所有的板子都能找到相应的BSP,这时就需要移植新的BSP。RT-Thread的所有BSP中,最完善的BSP就是STM32系列,但从2020年下半年开始,国内出现史无前例的芯片缺货潮,芯片的交期和价格不断拉升,STM32的价格也是水涨船高,很多朋友也在考虑使用国产替代,笔者使用的兆易创新的GD32系列,我看了下RT-Thread中GD系列BSP,都是玩家各自为政,每个人都是提交自己使用的板子的BSP,充斥着大量冗余的代码,对于有强迫症的我就非常不爽,就根据手头的板子,参看STM32的BSP架构,构建了GD32的BSP架构。
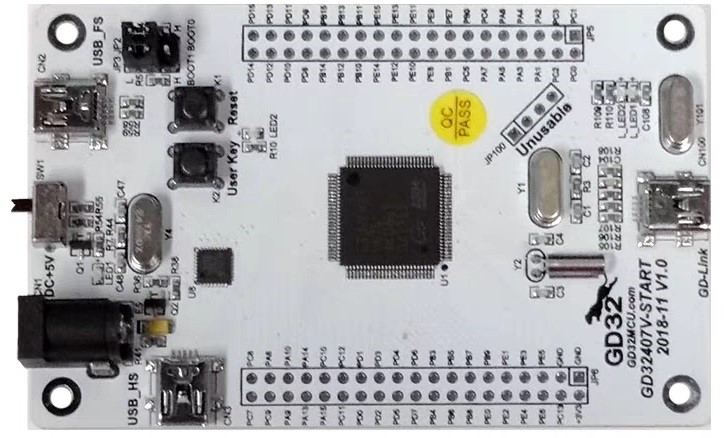
笔者使用的开发板是兆易创新设计的GD32407V-START开发板。其主控芯片为GD32F407VKT6,主频168MHz,内部3072K Flash,192KB SRAM,资源相当丰富。
1 BSP框架制作
在具体移植GD32407V-START的BSP之前,先做好GD32的BSP架构。BSP框架结构如下图所示:
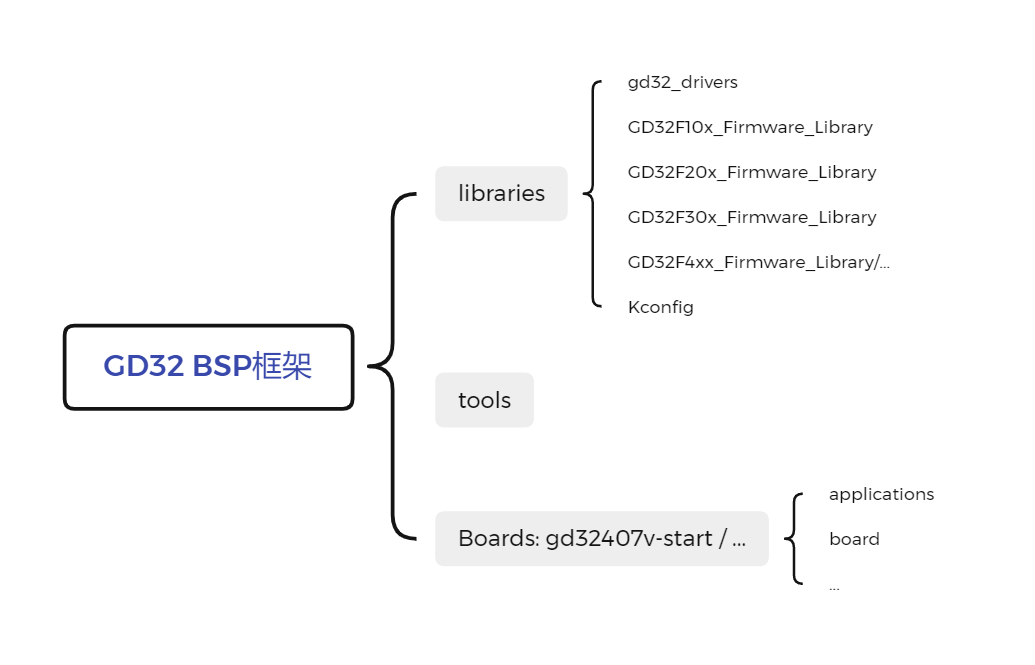
GD32的BSP架构主要分为三个部分:libraries、tools和具体的Boards,其中libraries包含了GD32的通用库,包括每个系列的Firmware Library以及适配RT-Thread的drivers;tools是生成工程的Python脚本工具;另外就是Boards文件,当然这里的Boards有很多,我这里值列举了GD32407V-START。
这里先谈谈libraries和tools的构建,然后在后文单独讨论具体板级BSP的制作。
1.1 Libraries构建
Libraries文件夹包含兆易创新提供的固件库,这个直接在兆易创新的官网就可以下载。
下载地址:http://www.gd32mcu.com/cn/download/
然后将GD32F4xx_Firmware_Library复制到libraries目录下,其他的系列类似。

GD32F4xx_Firmware_Library就是官方的文件,基本是不用动的,只是在文件夹中需要添加构建工程的脚本文件SConscript,其实也就是Python脚本。

SConscript文件的内容如下:
import rtconfig #导包
from building import *
# get current directory
cwd = GetCurrentDir() #获取当然路径
# The set of source files associated with this SConscript file.
src = Split('''
CMSIS/GD/GD32F4xx/Source/system_gd32f4xx.c
GD32F4xx_standard_peripheral/Source/gd32f4xx_gpio.c
GD32F4xx_standard_peripheral/Source/gd32f4xx_rcu.c
GD32F4xx_standard_peripheral/Source/gd32f4xx_exti.c
GD32F4xx_standard_peripheral/Source/gd32f4xx_misc.c
GD32F4xx_standard_peripheral/Source/gd32f4xx_syscfg.c
''')#将括号中的字符串分割后成列表(list),以便包含到工程中
if GetDepend(['RT_USING_SERIAL']):#如果打开了RT_USING_SERIAL的宏,则会包含以下源文件
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_usart.c']
if GetDepend(['RT_USING_I2C']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_i2c.c']
if GetDepend(['RT_USING_SPI']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_spi.c']
if GetDepend(['RT_USING_CAN']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_can.c']
if GetDepend(['BSP_USING_ETH']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_enet.c']
if GetDepend(['RT_USING_ADC']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_adc.c']
if GetDepend(['RT_USING_DAC']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_dac.c']
if GetDepend(['RT_USING_RTC']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_rtc.c']
if GetDepend(['RT_USING_WDT']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_wwdgt.c']
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_fwdgt.c']
if GetDepend(['RT_USING_SDIO']):
src += ['GD32F4xx_standard_peripheral/Source/gd32f4xx_sdio.c']
#头文件路径
path = [
cwd + '/CMSIS/GD/GD32F4xx/Include',
cwd + '/CMSIS',
cwd + '/GD32F4xx_standard_peripheral/Include',]
CPPDEFINES = ['USE_STDPERIPH_DRIVER']
#定义一个组,组名为'Libraries', depend为空表示依赖任何一个其他宏,另外当前的头文件路径添加到工程中
group = DefineGroup('Libraries', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES)
Return('group')
该文件主要的作用就是添加库文件和头文件路径,一部分文件是属于基础文件,因此直接调用Python库的Split包含,另外一部分文件是根据实际的应用需求添加的。
这里是以GD32F4来举例的,其他系列的都是类似的。
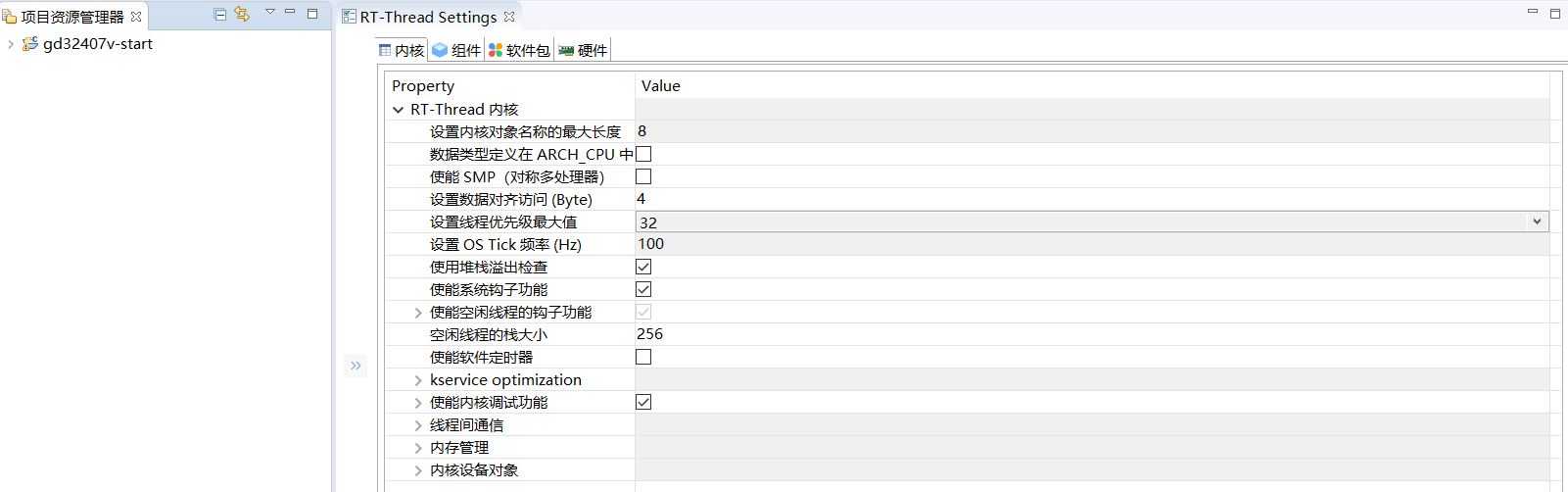
接下来说说Kconfig文件,这里是对内核和组件的功能进行配置,对RT-Thread的组件进行自由裁剪。
如果使用RT-Thread studio,则通过RT-Thread Setting可以体现Kconfig文件的作用。
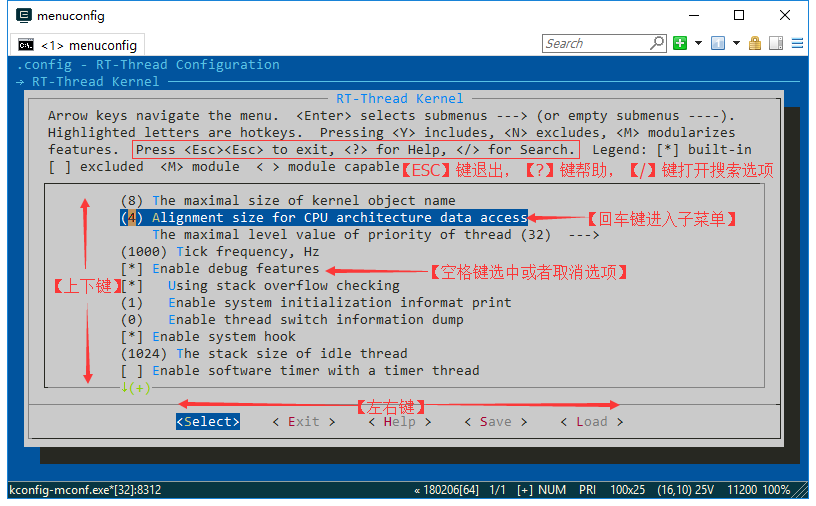
如果使用ENV环境,则在使用 menuconfig配置和裁剪 RT-Thread时体现。
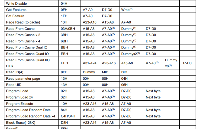
后面所有的Kconfig文件都是一样的逻辑。下表列举一些常用的Kconfig句法规则。
| 关键词 | 说明 |
| config | 此关键字定义了一新的配置选项 |
| menuconfig | 此关键字和前面的关键字很相似,但它在前面的基础上要求所有的子选项作为独立的行显示。 |
| choice/endchoice | 该关键字定义了一组选择项。 |
| comment | 这里定义了在配置过程中显示给用户的注释,该注释还将写进输出文件中。格式说明: comment "eg: description content" |
| menu / endmenu | 这里定义了一个菜单,所有依赖于此菜单的选项都是它的子选项。 |
| if/endif | 这里定义了if结构。 |
| source | 读取其他具体的配置文件,其他配置文件会被解析。 |
Kconfig的语法规则网上资料很多,自行去学习吧。
bsp/gd32/arm/libraries/Kconfig内容如下:
config SOC_FAMILY_GD32
bool
config SOC_SERIES_GD32F4
bool
select ARCH_ARM_CORTEX_M4
select SOC_FAMILY_GD32
因为该架构目前笔者只移植了GD32F4的,因此这里的内容比较少,如果有些的系列,直接参考F4的配置例子在这里加就可以了。
最后谈谈gd32_drivers,这个文件夹就是GD32的外设驱动文件夹,为上层应用提供调用接口。

该文件夹是整个GD32共用的,因此在编写和修改都要慎重。关于drv_xxx文件在后句具体移植BSP的时候讲解,这里主要将整体架构,SConscript和Kconfig的作用和前面的一样,只是具体的内容不同罢了。
好了,先看bsp/gd32/arm/libraries/gd32_drivers/SConscript文件。
import('RTT_ROOT')
import('rtconfig')
from building import *
cwd = GetCurrentDir()
# add the general drivers.
src = Split("""
""")
# add pin drivers.
if GetDepend('RT_USING_PIN'):
src += ['drv_gpio.c']
# add usart drivers.
if GetDepend(['RT_USING_SERIAL']):
src += ['drv_usart.c']
# add adc drivers.
if GetDepend('RT_USING_ADC'):
src += ['drv_adc.c']
# add i2c drivers.
if GetDepend(['RT_USING_I2C', 'RT_USING_I2C_BITOPS']):
if GetDepend('BSP_USING_I2C0') or GetDepend('BSP_USING_I2C1') or GetDepend('BSP_USING_I2C2') or GetDepend('BSP_USING_I2C3'):
src += ['drv_soft_i2c.c']
# add spi drivers.
if GetDepend('RT_USING_SPI'):
src += ['drv_spi.c']
# add spi flash drivers.
if GetDepend('RT_USING_SFUD'):
src += ['drv_spi_flash.c', 'drv_spi.c']
# add hwtimer drivers.
if GetDepend('RT_USING_HWTIMER'):
src += ['drv_hwtimer.c']
# add rtc drivers.
if GetDepend('RT_USING_RTC'):
src += ['drv_rtc.c']
# add iwdt drivers.
if GetDepend('RT_USING_WDT'):
src += ['drv_iwdt.c']
path = [cwd]
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path)
Return('group')
和GD32F4xx_Firmware_Library文件夹中的SConscript是类似的。
bsp/gd32/arm/libraries/gd32_drivers/Kconfig文件结构如下:
if BSP_USING_USBD
config BSP_USBD_TYPE_FS
bool
# "USB Full Speed (FS) Core"
config BSP_USBD_TYPE_HS
bool
# "USB High Speed (HS) Core"
config BSP_USBD_SPEED_HS
bool
# "USB High Speed (HS) Mode"
config BSP_USBD_SPEED_HSINFS
bool
# "USB High Speed (HS) Core in FS mode"
config BSP_USBD_PHY_EMBEDDED
bool
# "Using Embedded phy interface"
config BSP_USBD_PHY_UTMI
bool
# "UTMI: USB 2.0 Transceiver Macrocell Interace"
config BSP_USBD_PHY_ULPI
bool
# "ULPI: UTMI+ Low Pin Interface"
endif
1.2 Tools构建
该文件夹就是工程构建的脚本,
import os
import sys
import shutil
cwd_path = os.getcwd()
sys.path.append(os.path.join(os.path.dirname(cwd_path), 'rt-thread', 'tools'))
def bsp_update_board_kconfig(dist_dir):
# change board/kconfig path
if not os.path.isfile(os.path.join(dist_dir, 'board/Kconfig')):
return
with open(os.path.join(dist_dir, 'board/Kconfig'), 'r') as f:
data = f.readlines()
with open(os.path.join(dist_dir, 'board/Kconfig'), 'w') as f:
for line in data:
if line.find('../libraries/gd32_drivers/Kconfig') != -1:
position = line.find('../libraries/gd32_drivers/Kconfig')
line = line[0:position] + 'libraries/gd32_drivers/Kconfig"\n'
f.write(line)
# BSP dist function
def dist_do_building(BSP_ROOT, dist_dir):
from mkdist import bsp_copy_files
import rtconfig
print("=> copy gd32 bsp library")
library_dir = os.path.join(dist_dir, 'libraries')
library_path = os.path.join(os.path.dirname(BSP_ROOT), 'libraries')
bsp_copy_files(os.path.join(library_path, rtconfig.BSP_LIBRARY_TYPE),
os.path.join(library_dir, rtconfig.BSP_LIBRARY_TYPE))
print("=> copy bsp drivers")
bsp_copy_files(os.path.join(library_path, 'gd32_drivers'), os.path.join(library_dir, 'gd32_drivers'))
shutil.copyfile(os.path.join(library_path, 'Kconfig'), os.path.join(library_dir, 'Kconfig'))
bsp_update_board_kconfig(dist_dir)
以上代码很简单,主要使用了Python的OS模块的join函数,该函数的作用就是连接两个或更多的路径名。最后将BSP依赖的文件复制到指定目录下。
在使用scons --dist命令打包的时候,就是依赖的该脚本,生成的dist文件夹的工程到任何目录下使用,也就是将BSP相关的库以及内核文件提取出来,可以将该工程任意拷贝。
需要注意的是,使用scons --dist打包后需要修改board/Kconfig中的库路径,因此这里调用了bsp_update_board_kconfig方法修改。
1.3 gd32407v-start构建
该文件夹就gd32407v-start的具体BSP文件,文件结构如下:
在后面将具体讲解如何构建该部分内容。
2 BSP移植
2.1 Keil环境准备
目前市面通用的MDK for ARM版本有Keil 4和Keil 5:使用Keil 4建议安装4.74及以上;使用Keil 5建议安装5.20以上版本。笔者的MDK是5.30。
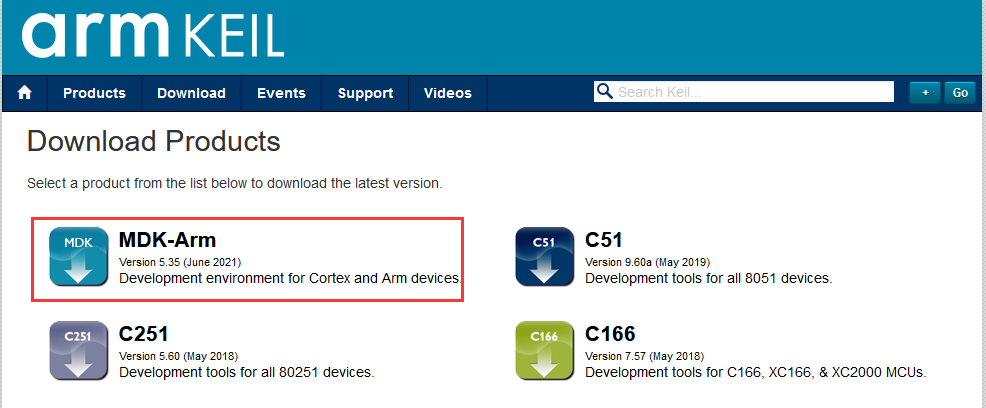
从MDK的官网可以下载得到MDK的安装包,然后安装即可,关于的MDK安装请看笔者的教程。
MDK安装教程:https://blog.csdn.net/bruceoxl/article/details/108548573
MDK下载地址:https://www.keil.com/download/product/
安装完成后会自动打开,我们将其关闭。
接下来我们下载GD32F4xx的软件支持包。
下载地址:http://www.gd32mcu.com/cn/download

下载好后双击GigaDevice.GD32F4xx_DFP.2.1.0.pack运行即可:
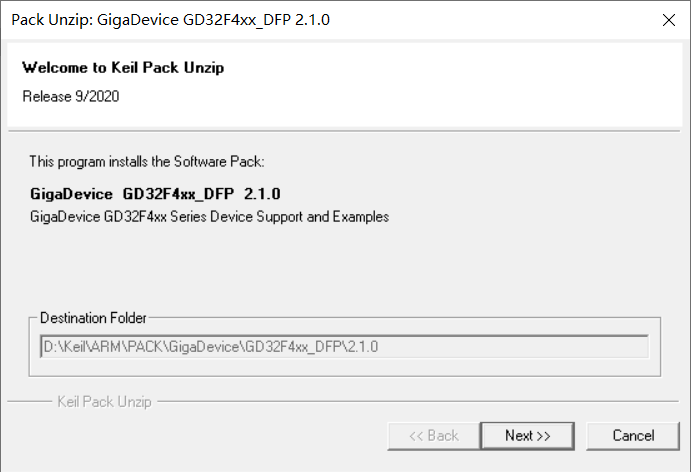
点击[Next]即可安装完成。
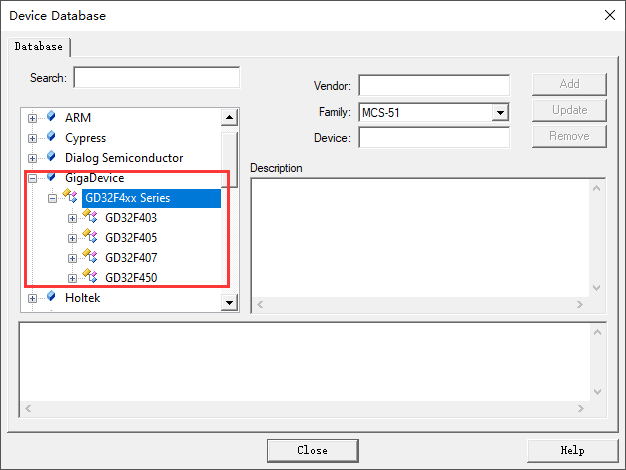
安装成功后,重新打开Keil,则可以在File->Device Database中出现Gigadevice的下拉选项,点击可以查看到相应的型号。
2.2 BSP工程制作
1.构建基础工程
首先看看RT-Thread代码仓库中已有很多BSP,而我要移植的是Cortex-M4内核。这里我找了一个相似的内核,把它复制一份,并修改文件名为:gd32407v-start。这样就有一个基础的工程。然后就开始增删改查,完成最终的BSP,几乎所有的BSP的制作都是如此。
2.修改BSP构建脚本
bsp/gd32/arm/gd32407v-start/SConstruct修改后的内容如下:
import os
import sys
import rtconfig
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
else:
RTT_ROOT = os.path.normpath(os.getcwd() + '/../../../..')
sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
try:
from building import *
except:
print('Cannot found RT-Thread root directory, please check RTT_ROOT')
print(RTT_ROOT)
exit(-1)
TARGET = 'rtthread.' + rtconfig.TARGET_EXT
DefaultEnvironment(tools=[])
env = Environment(tools = ['mingw'],
AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS,
CC = rtconfig.CC, CCFLAGS = rtconfig.CFLAGS,
AR = rtconfig.AR, ARFLAGS = '-rc',
CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS,
LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS)
env.PrependENVPath('PATH', rtconfig.EXEC_PATH)
if rtconfig.PLATFORM == 'iar':
env.Replace(CCCOM = ['$CC $CCFLAGS $CPPFLAGS $_CPPDEFFLAGS $_CPPINCFLAGS -o $TARGET $SOURCES'])
env.Replace(ARFLAGS = [''])
env.Replace(LINKCOM = env["LINKCOM"] + ' --map rtthread.map')
Export('RTT_ROOT')
Export('rtconfig')
SDK_ROOT = os.path.abspath('./')
if os.path.exists(SDK_ROOT + '/libraries'):
libraries_path_prefix = SDK_ROOT + '/libraries'
else:
libraries_path_prefix = os.path.dirname(SDK_ROOT) + '/libraries'
SDK_LIB = libraries_path_prefix
Export('SDK_LIB')
# prepare building environment
objs = PrepareBuilding(env, RTT_ROOT, has_libcpu=False)
gd32_library = 'GD32F4xx_Firmware_Library'
rtconfig.BSP_LIBRARY_TYPE = gd32_library
# include libraries
objs.extend(SConscript(os.path.join(libraries_path_prefix, gd32_library, 'SConscript')))
# include drivers
objs.extend(SConscript(os.path.join(libraries_path_prefix, 'Drivers', 'SConscript')))
# make a building
DoBuilding(TARGET, objs)
该文件用于链接所有的依赖文件,并调用make进行编译。
3.修改KEIL的模板工程
双击:template.uvprojx即可修改模板工程。
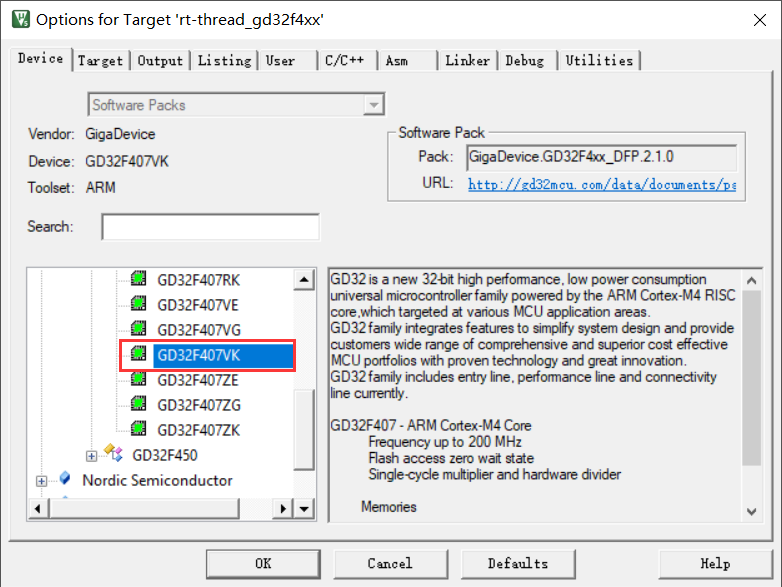
修改为对应芯片设备:
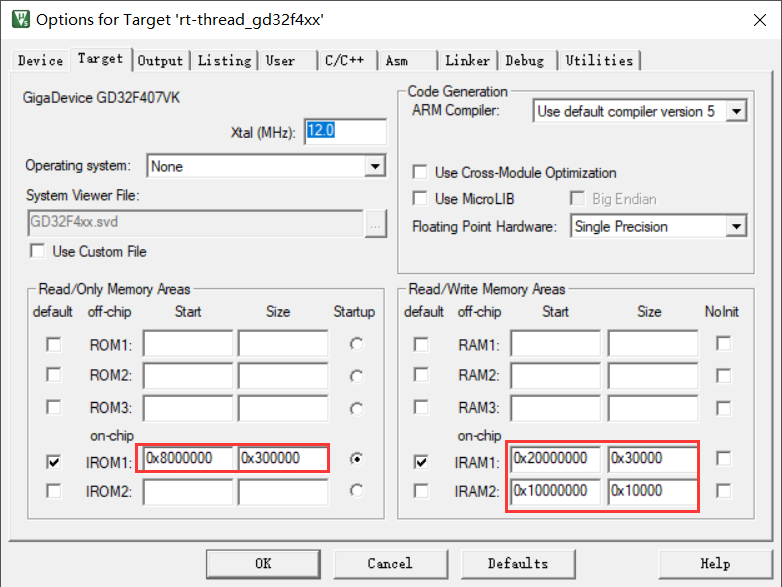
修改FLASH和RAM的配置:
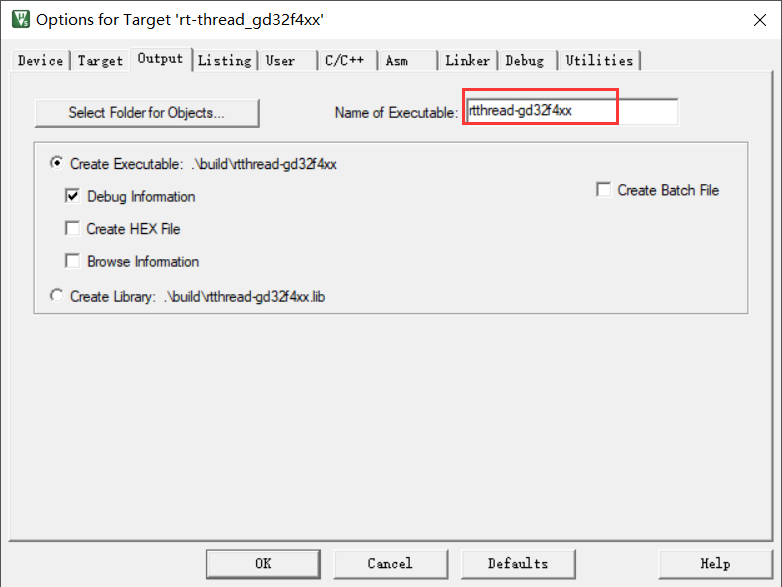
修改可执行文件名字:
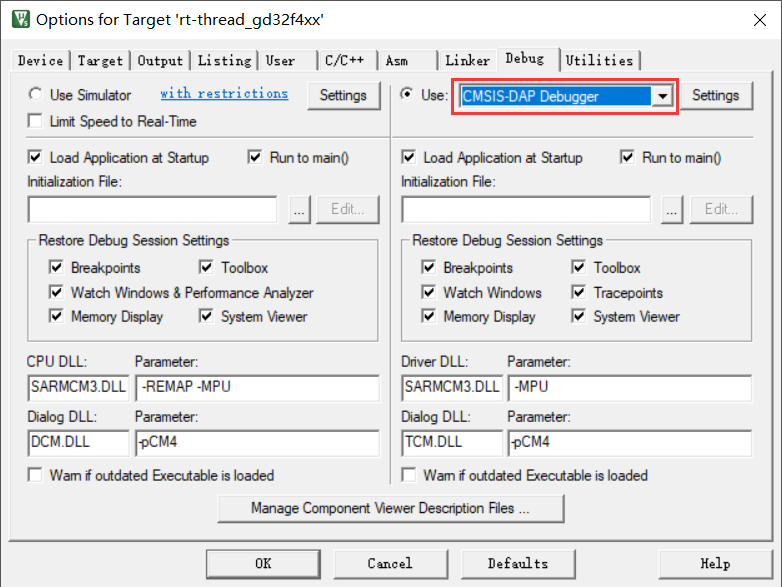
修改默认调试工具:CMSIS-DAP Debugger。
4.修改board文件夹
(1)修改bsp/gd32/arm/gd32407v-start/board/linker_scripts/link.icf
修改后的内容如下:
/*###ICF### Section handled by ICF editor, don't touch! ****/
/*-Editor annotation file-*/
/* IcfEditorFile="$TOOLKIT_DIR$\config\ide\IcfEditor\cortex_v1_0.xml" */
/*-Specials-*/
define symbol __ICFEDIT_intvec_start__ = 0x08000000;
/*-Memory Regions-*/
define symbol __ICFEDIT_region_ROM_start__ = 0x08000000;
define symbol __ICFEDIT_region_ROM_end__ = 0x082FFFFF;
define symbol __ICFEDIT_region_RAM_start__ = 0x20000000;
define symbol __ICFEDIT_region_RAM_end__ = 0x2002FFFF;
/*-Sizes-*/
define symbol __ICFEDIT_size_cstack__ = 0x2000;
define symbol __ICFEDIT_size_heap__ = 0x2000;
/**** End of ICF editor section. ###ICF###*/
export symbol __ICFEDIT_region_RAM_end__;
define symbol __region_RAM1_start__ = 0x10000000;
define symbol __region_RAM1_end__ = 0x1000FFFF;
define memory mem with size = 4G;
define region ROM_region = mem:[from __ICFEDIT_region_ROM_start__ to __ICFEDIT_region_ROM_end__];
define region RAM_region = mem:[from __ICFEDIT_region_RAM_start__ to __ICFEDIT_region_RAM_end__];
define region RAM1_region = mem:[from __region_RAM1_start__ to __region_RAM1_end__];
define block CSTACK with alignment = 8, size = __ICFEDIT_size_cstack__ { };
define block HEAP with alignment = 8, size = __ICFEDIT_size_heap__ { };
initialize by copy { readwrite };
do not initialize { section .noinit };
keep { section FSymTab };
keep { section VSymTab };
keep { section .rti_fn* };
place at address mem:__ICFEDIT_intvec_start__ { readonly section .intvec };
place in ROM_region { readonly };
place in RAM_region { readwrite,
block CSTACK, block HEAP };
place in RAM1_region { section .sram };
该文件是IAR编译的链接脚本,根据《GD32F407xx_Datasheet_Rev2.1》可知,GD32F407VKT6的flash大小为3072KB,SRAM大小为192KB,因此需要设置ROM和RAM的起始地址和堆栈大小等。
(2)修改bsp/gd32/arm/gd32407v-start/board/linker_scripts/link.ld
修改后的内容如下:
/* Program Entry, set to mark it as "used" and avoid gc */
MEMORY
{
CODE (rx) : ORIGIN = 0x08000000, LENGTH = 3072k /* 3072KB flash */
DATA (rw) : ORIGIN = 0x20000000, LENGTH = 192k /* 192KB sram */
}
ENTRY(Reset_Handler)
_system_stack_size = 0x200;
SECTIONS
{
.text :
{
. = ALIGN(4);
_stext = .;
KEEP(*(.isr_vector)) /* Startup code */
. = ALIGN(4);
*(.text) /* remaining code */
*(.text.*) /* remaining code */
*(.rodata) /* read-only data (constants) */
*(.rodata*)
*(.glue_7)
*(.glue_7t)
*(.gnu.linkonce.t*)
/* section information for finsh shell */
. = ALIGN(4);
__fsymtab_start = .;
KEEP(*(FSymTab))
__fsymtab_end = .;
. = ALIGN(4);
__vsymtab_start = .;
KEEP(*(VSymTab))
__vsymtab_end = .;
. = ALIGN(4);
/* section information for initial. */
. = ALIGN(4);
__rt_init_start = .;
KEEP(*(SORT(.rti_fn*)))
__rt_init_end = .;
. = ALIGN(4);
. = ALIGN(4);
_etext = .;
} > CODE = 0
/* .ARM.exidx is sorted, so has to go in its own output section. */
__exidx_start = .;
.ARM.exidx :
{
*(.ARM.exidx* .gnu.linkonce.armexidx.*)
/* This is used by the startup in order to initialize the .data secion */
_sidata = .;
} > CODE
__exidx_end = .;
/* .data section which is used for initialized data */
.data : AT (_sidata)
{
. = ALIGN(4);
/* This is used by the startup in order to initialize the .data secion */
_sdata = . ;
*(.data)
*(.data.*)
*(.gnu.linkonce.d*)
. = ALIGN(4);
/* This is used by the startup in order to initialize the .data secion */
_edata = . ;
} >DATA
.stack :
{
. = . + _system_stack_size;
. = ALIGN(4);
_estack = .;
} >DATA
__bss_start = .;
.bss :
{
. = ALIGN(4);
/* This is used by the startup in order to initialize the .bss secion */
_sbss = .;
*(.bss)
*(.bss.*)
*(COMMON)
. = ALIGN(4);
/* This is used by the startup in order to initialize the .bss secion */
_ebss = . ;
*(.bss.init)
} > DATA
__bss_end = .;
_end = .;
/* Stabs debugging sections. */
.stab 0 : { *(.stab) }
.stabstr 0 : { *(.stabstr) }
.stab.excl 0 : { *(.stab.excl) }
.stab.exclstr 0 : { *(.stab.exclstr) }
.stab.index 0 : { *(.stab.index) }
.stab.indexstr 0 : { *(.stab.indexstr) }
.comment 0 : { *(.comment) }
/* DWARF debug sections.
* Symbols in the DWARF debugging sections are relative to the beginning
* of the section so we begin them at 0. */
/* DWARF 1 */
.debug 0 : { *(.debug) }
.line 0 : { *(.line) }
/* GNU DWARF 1 extensions */
.debug_srcinfo 0 : { *(.debug_srcinfo) }
.debug_sfnames 0 : { *(.debug_sfnames) }
/* DWARF 1.1 and DWARF 2 */
.debug_aranges 0 : { *(.debug_aranges) }
.debug_pubnames 0 : { *(.debug_pubnames) }
/* DWARF 2 */
.debug_info 0 : { *(.debug_info .gnu.linkonce.wi.*) }
.debug_abbrev 0 : { *(.debug_abbrev) }
.debug_line 0 : { *(.debug_line) }
.debug_frame 0 : { *(.debug_frame) }
.debug_str 0 : { *(.debug_str) }
.debug_loc 0 : { *(.debug_loc) }
.debug_macinfo 0 : { *(.debug_macinfo) }
/* SGI/MIPS DWARF 2 extensions */
.debug_weaknames 0 : { *(.debug_weaknames) }
.debug_funcnames 0 : { *(.debug_funcnames) }
.debug_typenames 0 : { *(.debug_typenames) }
.debug_varnames 0 : { *(.debug_varnames) }
}
该文件是GCC编译的链接脚本,根据《GD32F407xx_Datasheet_Rev2.1》可知,GD32F407VKT6的flash大小为3072KB,SRAM大小为192KB,因此CODE和DATA的LENGTH分别设置为3072KB和192KB,其他芯片类似,但其实地址都是一样的。
(3)修改bsp/gd32/arm/gd32407v-start/board/linker_scripts/link.sct
该文件是MDK的连接脚本,根据《GD32F407xx_Datasheet_Rev2.1》手册,因此需要将 LR_IROM1和 ER_IROM1的参数设置为 0x00300000;RAM的大小为192k,因此需要将 RW_IRAM1的参数设置为 0x00030000。
; *************************************************************
; *** Scatter-Loading Description File generated by uVision ***
; *************************************************************
LR_IROM1 0x08000000 0x00300000 { ; load region size_region
ER_IROM1 0x08000000 0x00300000{ ; load address = execution address
*.o (RESET, +First)
*(InRoot$$Sections)
.ANY (+RO)
}
RW_IRAM1 0x20000000 0x00030000{ ; RW data
.ANY (+RW +ZI)
}
}
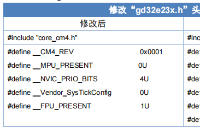
(4)修改bsp/gd32/arm/gd32407v-start/board/board.h文件
修改后内容如下:
#ifndef __BOARD_H__
#define __BOARD_H__
#include "gd32f4xx.h"
#include "drv_usart.h"
#include "drv_gpio.h"
#include "gd32f4xx_exti.h"
#define EXT_SDRAM_BEGIN (0xC0000000U) /* the begining address of external SDRAM */
#define EXT_SDRAM_END (EXT_SDRAM_BEGIN + (32U * 1024 * 1024)) /* the end address of external SDRAM */
// Internal SRAM memory size[Kbytes] <8-64>
// Default: 64
#ifdef __ICCARM__
// Use *.icf ram symbal, to avoid hardcode.
extern char __ICFEDIT_region_RAM_end__;
#define GD32_SRAM_END &__ICFEDIT_region_RAM_end__
#else
#define GD32_SRAM_SIZE 192
#define GD32_SRAM_END (0x20000000 + GD32_SRAM_SIZE * 1024)
#endif
#ifdef __CC_ARM
extern int Image$$RW_IRAM1$$ZI$$Limit;
#define HEAP_BEGIN (&Image$$RW_IRAM1$$ZI$$Limit)
#elif __ICCARM__
#pragma section="HEAP"
#define HEAP_BEGIN (__segment_end("HEAP"))
#else
extern int __bss_end;
#define HEAP_BEGIN (&__bss_end)
#endif
#define HEAP_END GD32_SRAM_END
#endif
值得注意的是,不同的编译器规定的堆栈内存的起始地址 HEAP_BEGIN和结束地址 HEAP_END。这里 HEAP_BEGIN和 HEAP_END的值需要和前面的链接脚本是一致的,需要结合实际去修改。
(5)修改bsp/gd32/arm/gd32407v-start/board/board.c文件
修改后的文件如下:
#include
#include
#include
#include
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler */
/* User can add his own implementation to report the HAL error return state */
while (1)
{
}
/* USER CODE END Error_Handler */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
NVIC_SetPriority(SysTick_IRQn, 0);
}
/**
* This is the timer interrupt service routine.
*
*/
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
/**
* This function will initial GD32 board.
*/
void rt_hw_board_init()
{
/* NVIC Configuration */
#define NVIC_VTOR_MASK 0x3FFFFF80
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x10000000 */
SCB->VTOR = (0x10000000 & NVIC_VTOR_MASK);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
SCB->VTOR = (0x08000000 & NVIC_VTOR_MASK);
#endif
SystemClock_Config();
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#ifdef RT_USING_CONSOLE
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#ifdef BSP_USING_SDRAM
rt_system_heap_init((void *)EXT_SDRAM_BEGIN, (void *)EXT_SDRAM_END);
#else
rt_system_heap_init((void *)HEAP_BEGIN, (void *)HEAP_END);
#endif
}
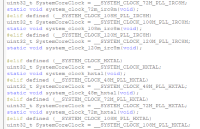
该文件重点关注的就是SystemClock_Config配置,SystemCoreClock的定义在system_gd32f4xx.c中定义的。
(6)修改bsp/gd32/arm/gd32407v-start/board/Kconfig文件
修改后内容如下:
menu "Hardware Drivers Config"
config SOC_GD32407V
bool
select SOC_SERIES_GD32F4
select RT_USING_COMPONENTS_INIT
select RT_USING_USER_MAIN
default y
menu "Onboard Peripheral Drivers"
endmenu
menu "On-chip Peripheral Drivers"
config BSP_USING_GPIO
bool "Enable GPIO"
select RT_USING_PIN
default y
menuconfig BSP_USING_UART
bool "Enable UART"
default y
select RT_USING_SERIAL
if BSP_USING_UART
config BSP_USING_UART1
bool "Enable UART1"
default y
config BSP_UART1_RX_USING_DMA
bool "Enable UART1 RX DMA"
depends on BSP_USING_UART1 && RT_SERIAL_USING_DMA
default n
endif
menuconfig BSP_USING_SPI
bool "Enable SPI BUS"
default n
select RT_USING_SPI
if BSP_USING_SPI
config BSP_USING_SPI1
bool "Enable SPI1 BUS"
default n
config BSP_SPI1_TX_USING_DMA
bool "Enable SPI1 TX DMA"
depends on BSP_USING_SPI1
default n
config BSP_SPI1_RX_USING_DMA
bool "Enable SPI1 RX DMA"
depends on BSP_USING_SPI1
select BSP_SPI1_TX_USING_DMA
default n
endif
menuconfig BSP_USING_I2C1
bool "Enable I2C1 BUS (software simulation)"
default n
select RT_USING_I2C
select RT_USING_I2C_BITOPS
select RT_USING_PIN
if BSP_USING_I2C1
config BSP_I2C1_SCL_PIN
int "i2c1 scl pin number"
range 1 216
default 24
config BSP_I2C1_SDA_PIN
int "I2C1 sda pin number"
range 1 216
default 25
endif
source "../libraries/gd32_drivers/Kconfig"
endmenu
menu "Board extended module Drivers"
endmenu
endmenu
这个文件就是配置板子驱动的,这里可根据实际需求添加。
(7)修改bsp/gd32/arm/gd32407v-start/board/SConscript文件
修改后内容如下:
import os
import rtconfig
from building import *
Import('SDK_LIB')
cwd = GetCurrentDir()
# add general drivers
src = Split('''
board.c
''')
path = [cwd]
startup_path_prefix = SDK_LIB
if rtconfig.CROSS_TOOL == 'gcc':
src += [startup_path_prefix + '/GD32F4xx_Firmware_Library/CMSIS/GD/GD32F4xx/Source/GCC/startup_gd32f4xx.s']
elif rtconfig.CROSS_TOOL == 'keil':
src += [startup_path_prefix + '/GD32F4xx_Firmware_Library/CMSIS/GD/GD32F4xx/Source/ARM/startup_gd32f4xx.s']
elif rtconfig.CROSS_TOOL == 'iar':
src += [startup_path_prefix + '/GD32F4xx_Firmware_Library/CMSIS/GD/GD32F4xx/Source/IAR/startup_gd32f4xx.s']
CPPDEFINES = ['GD32F407']
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES)
Return('group')
该文件主要添加board文件夹的.c文件和头文件路径。另外根据开发环境选择相应的汇编文件,和前面的libraries的SConscript语法是一样,文件的结构都是类似的,这里就没有注释了。
到这里,基本所有的依赖脚本都配置完成了,接下来将通过menuconfig配置工程。
5.menuconfig配置
关闭套接字抽象层。

关闭网络设备接口。

关闭LWIP协议栈。

GD32407V-START板载没有以太网,因此这里主要是关闭网络相关的内容,当然GD32407V-START的资源丰富,不关这些其实也不影响,如果是其他MCU,根据实际需求自行修改吧。
6.驱动修改
一个基本的BSP中,串口是必不可少的,所以还需要编写串口驱动,这里使用的串口2作为调试串口。
板子上还有LED灯,主要要编写GPIO驱动即可。
关于串口和LED的驱动可以查看源码,这里就不贴出来了。
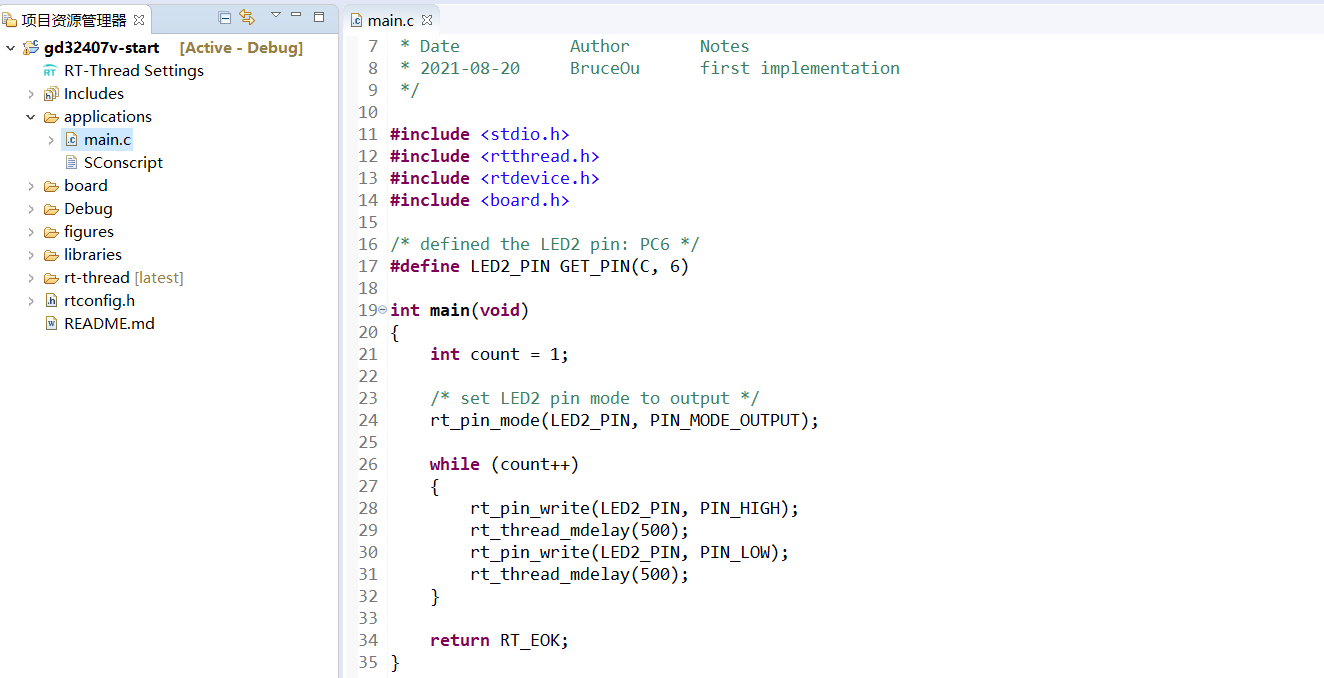
7.应用开发
笔者在applications的main.c中添加LED的应用代码,
#include
#include
#include
#include
/* defined the LED2 pin: PC6 */
#define LED2_PIN GET_PIN(C, 6)
int main(void)
{
int count = 1;
/* set LED2 pin mode to output */
rt_pin_mode(LED2_PIN, PIN_MODE_OUTPUT);
while (count++)
{
rt_pin_write(LED2_PIN, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED2_PIN, PIN_LOW);
rt_thread_mdelay(500);
}
return RT_EOK;
}
当然,这需要GPIO驱动的支持。
8.使用ENV编译工程
在env中执行:scons

编译成功打印信息如下:

9.使用env生成MDK工程
在env中执行:scons --target=mdk5
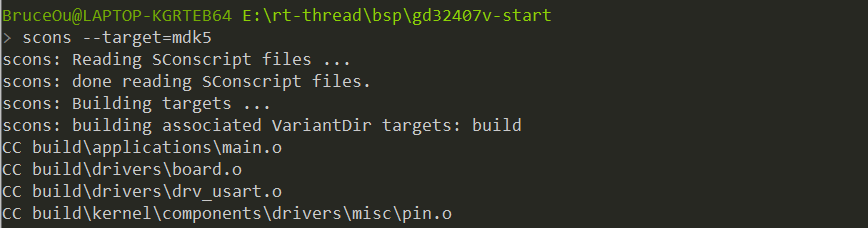
生成MDK工程后,打开MDK工程进行编译

成功编译打印信息如下:

【注】笔者没有IAR环境,有兴趣的朋友自行去开发吧。
2.3使用GD-Link下载调试GD32
前面使用ENV和MDK成功编译可BSP,那么接下来就是下载调试环节,下载需要下载器,而GD32部分开发板自带GD-link,可以用开发板上自带的GD-link调试仿真代码,不带的可外接GD-link模块,还是很方便的。具体操作方法如下。
1.第一次使用GD-link插入电脑后,会自动安装驱动。
在Options for Target -> Debug中选择“CMSIS-DAP Debugger”,值得注意的是,只有Keil4.74以上的版本和Keil5才支持CMSIS-DAP Debugger选项。

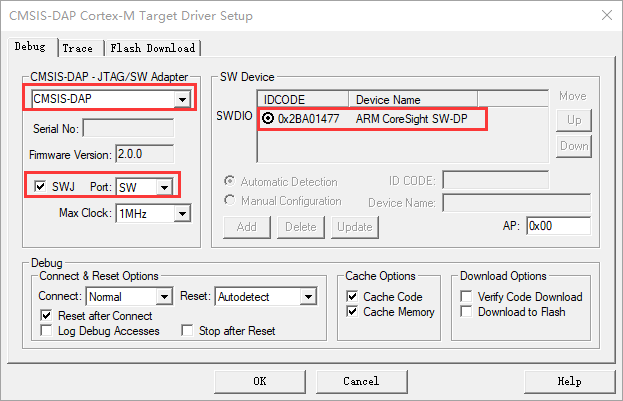
2.在Options for Target -> Debug ->Settings勾选SWJ、 Port选择 SW。右框IDcode会出现”0xXBAXXXXX”。
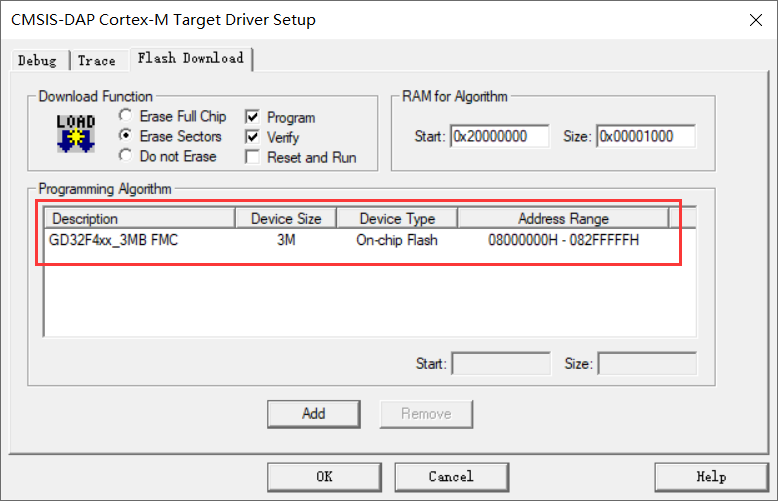
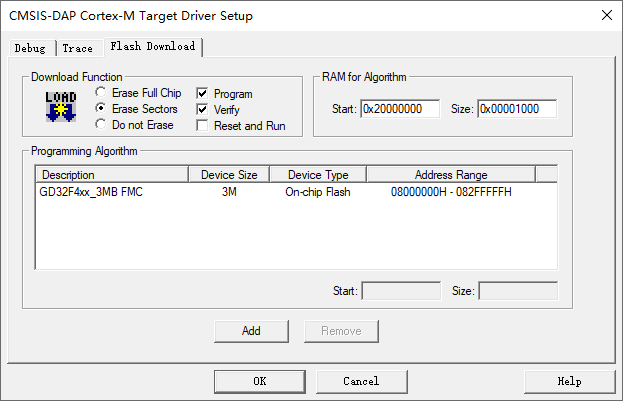
3.在Options for Target -> Debug ->Settings -> Flash Download中添加GD32的flash算法。
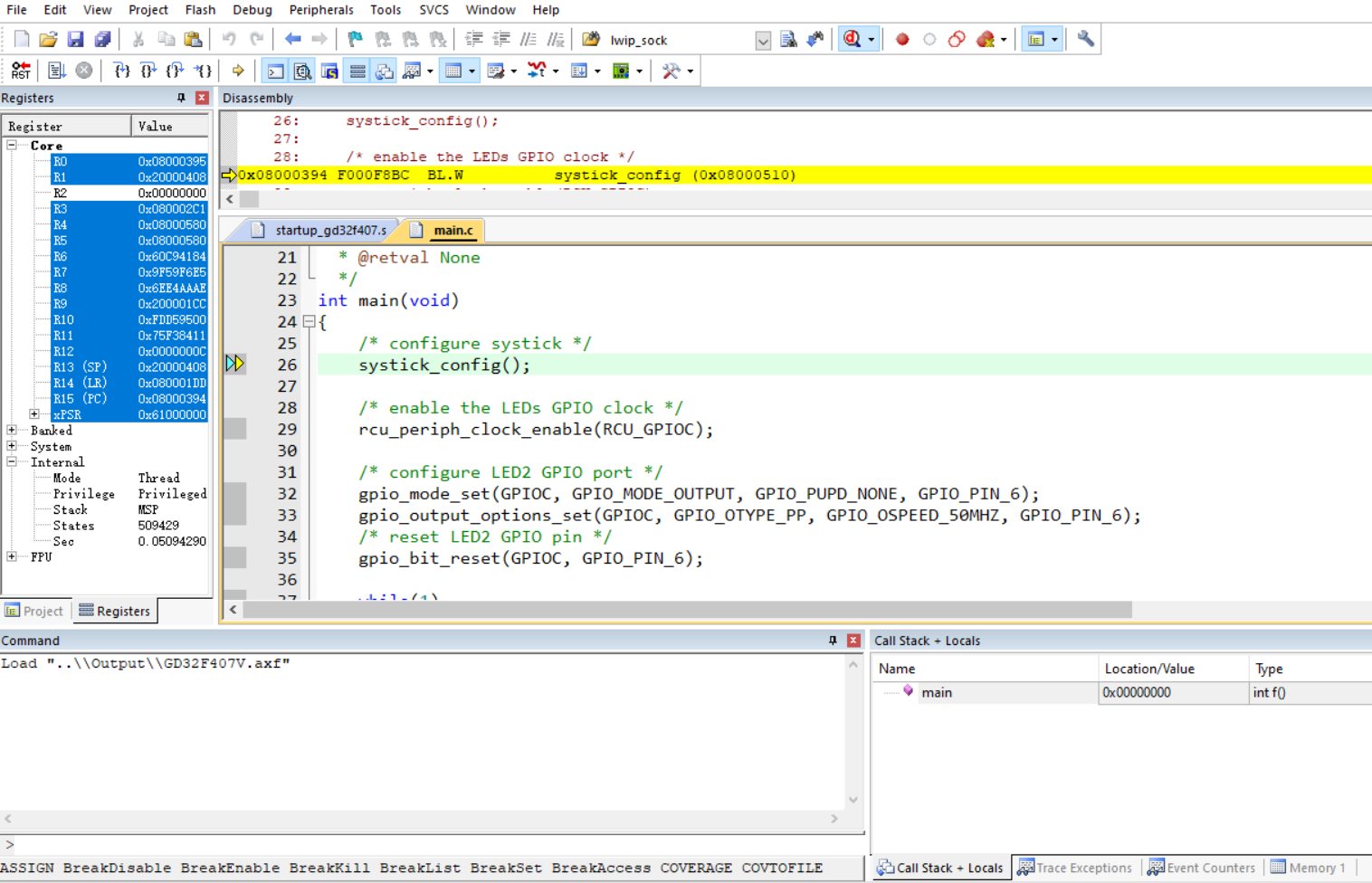
4.单击下图的快捷方式“debug”,即可使用GD-Link进行仿真。
当然啦,也可使用GD-Link下载程序。

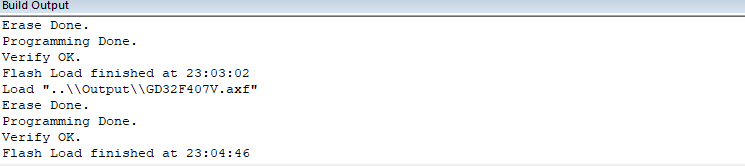
下载程序成功后,打印信息如下:
接上串口,打印信息如下:

同时LED会不断闪烁。
2.4 RT-Thread studio开发
当然,该工程也可导出使用rt-thread studio开发。
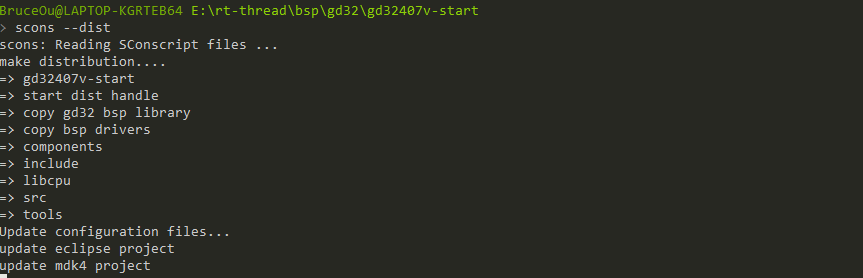
先使用scons --dist导出工程。
再将工程导入rt-thread studio中
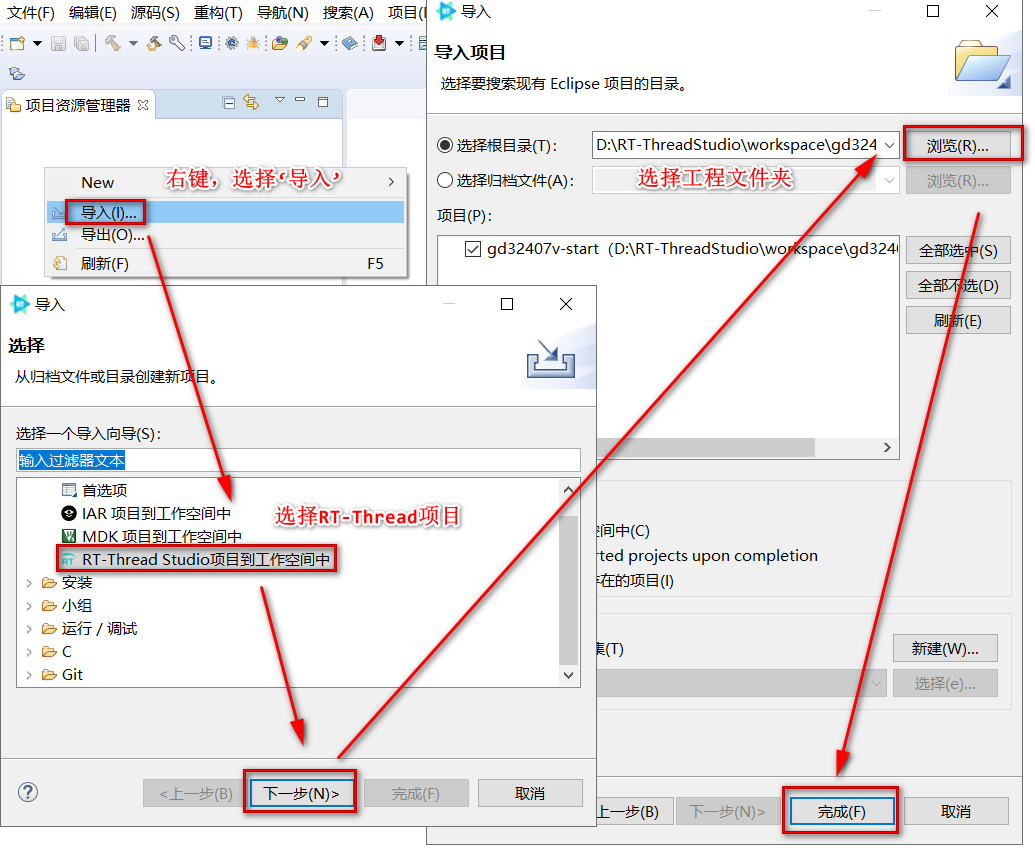
最后,就可在rt-thread studio就可进行开发工作了。
当然啦,后面也可在rt-thread studio中新建工程时选择笔者提交的GD32407V-START的BSP。
关于BSP的移植就到这里了,当然还有很多内容,这里只是抛砖引玉。最后希望更多的朋友加入进来,为国产RTOS贡献自己的力量吧。
源码地址:
GD32 BSP: https://gitee.com/ouxiaolong/GD32_RT-Thread
RT-Thread:https://github.com/Ouxiaolong/rt-thread/tree/master/bsp/gd32
审核编辑:汤梓红
-
移植
+关注
关注
1文章
388浏览量
28348 -
开发板
+关注
关注
25文章
5243浏览量
99493 -
BSP
+关注
关注
1文章
89浏览量
26466 -
RT-Thread
+关注
关注
31文章
1326浏览量
40948 -
GD32
+关注
关注
7文章
416浏览量
24725
发布评论请先 登录
相关推荐
北京迅为RK3568开发板OpenHarmony系统南向驱动开发内核HDF驱动框架架构
ElfBoard技术贴|如何在ELF 1开发板上交叉移植Qt

am335x开发板能否支持Vxworks操作系统的移植?
【RA-Eco-RA4E2-64PIN-V1.0开发板试用】点灯并使用串口下载程序
如何使用 RISC-V 进行嵌入式开发

野火GD32H759开发板产品概述
【RA-Eco-RA2E1-48PIN-V1.0开发板试用】RA-Eco-RA2E1-48PIN-V1.0开发板流水灯测试
【RA-Eco-RA2E1-48PIN-V1.0开发板试用】先来点个灯
【GD32 MCU 移植教程】5、GD32E230 系列移植到 GD32F330 系列
【GD32 MCU 移植教程】2、从 GD32F303 移植到 GD32F503
【GD32F303红枫派开发板使用手册】第二十讲 SPI-SPI NAND FLASH读写实验
米尔NXP i.MX 93开发板的Qt开发指南






 工商网监
工商网监
评论